基于正则化约束总体最小二乘的单站DOA-TDOA无源定位算法
2016-10-13赵拥军赵勇胜
赵拥军 赵勇胜 赵 闯
基于正则化约束总体最小二乘的单站DOA-TDOA无源定位算法
赵拥军*赵勇胜 赵 闯
(解放军信息工程大学导航与空天目标工程学院 郑州 450001)
针对利用单站外辐射源的目标无源定位问题,该文提出一种联合到达角度和时差信息的正则化约束总体最小二乘(RCTLS)定位算法。首先,将非线性的到达角度和时差的观测方程进行线性化处理,分析了方程系数矩阵可能出现的病态问题,将定位问题建立为RCTLS模型,并采用牛顿迭代方法对模型求解,从而得到目标位置估计。最后,推导了算法的理论误差,并按照均方误差最小的原则推导了正则化参数的最优值。仿真结果表明,算法的定位精度和鲁棒性均优于约束总体最小二乘(CTLS)算法。此外,对系统几何精度因子图的分析表明,目标及外辐射源的位置对定位精度也有影响。
无源定位;到达角度和时差;单站;外辐射源;正则化约束总体最小二乘
1 引言
基于外辐射源的无源定位方法,又称为无源相干定位(Passive Coherent Location, PCL)。作为一种特殊的双基地雷达,PCL系统本身不辐射电磁波,而是利用第三方的非合作辐射源来探测目标,具有结构简单,成本低,隐蔽性高,不占用频谱资源,抗电子干扰,可探测隐形目标等优点[1]。多年来,一直是国际雷达领域的研究热点。
无源相干定位系统利用第三方的外辐射源来照射目标,通过接收外辐射源的直达信号和目标回波信号,实现对目标定位。目前,可利用的外辐射源包括模拟电视信号[2],调频广播信号[3],数字音频广播信号[3],数字视频广播信号[3],手机基站信号[4],WIFI信号[5]等。而相比于多站系统,单站系统机动性强,不存在时间和数据同步的问题。因此,研究高精度的单站外辐射源定位算法具有重要意义。
目前,对于固定目标的无源定位方法主要包括基于信号到达强度[6]、信号到达方向(Direction Of Arrival, DOA)[7]、信号到达时差(Time Difference Of Arrival, TDOA)[8],以及联合其中两种或者3种观测信息的定位体制[9]。其中,联合DOA和TDOA定位体制因其定位精度高,在单站条件下仅需一个外辐射源即可定位等优点,在工程上被广泛采用。
文献[10]提出了一种基于牛顿迭代的单站多外辐射源定位方法,联合DOA和TDOA信息,得到了目标位置的近似最大似然估计,并证明了联合DOA和TDOA信息的定位精度优于仅TDOA定位方法。文献[11]同时考虑DOA和TDOA方程中各项系数的误差,将其建立为约束总体最小二乘(Constrained Total Least Squares, CTLS)模型。CTLS算法克服了总体最小二乘算法(Total Least Squares, TLS)在噪声分量统计相关时不能达到最优解的问题,在测量噪声适中时可以达到CRLB。但由于目标及外辐射源位置分布的影响,系数矩阵可能出现病态(ill-conditioned)问题,导致因微小的观测误差而造成方程求解结果的巨大波动,使得CTLS算法性能下降。克服方程求解病态问题的有效方法是使用正则化方法[12]。正则化约束总体最小二乘(Regularized Constrained Total Least Squares, RCTLS)算法作为约束总体最小二乘算法的扩展,其基本思想是通过引入正则化参数,将最小化的目标函数替换为两个互补函数之和。文献[13]提出了正则化约束总体最小二乘算法,解决了图像恢复问题中的病态问题。文献[14]从理论上证明,RCTLS算法具有比CTLS算法更低的均方误差和更高的鲁棒性。文献[15]分析了大地测量中病态问题产生的原因及诊断方法,并将正则化思想应用到线性方程组求解中,得到了较好的效果。文献[16]将正则化约束总体最小二乘算法应用到基于到达时差的无源定位问题中,证明了算法对于求解无源定位中时差方程具有较高的定位精度和稳健性。
本文研究利用外辐射源的单站无源相干定位问题,采用到达角度和时差信息,对目标位置进行估计。分析了在目标高度较低时,定位方程中系数矩阵出现的病态问题。为了解决病态问题,将正则化思想应用到定位模型中,将定位方程建立为带约束的RCTLS问题,并利用牛顿迭代方法求解。
2 定位场景
本文考虑的3维单站无源相干定位场景如图1所示:假设场景中有个外辐射源,1个目标,1个观测站。观测站上布设两副天线,分别用于接收来自外辐射源的直达信号和目标回波信号。
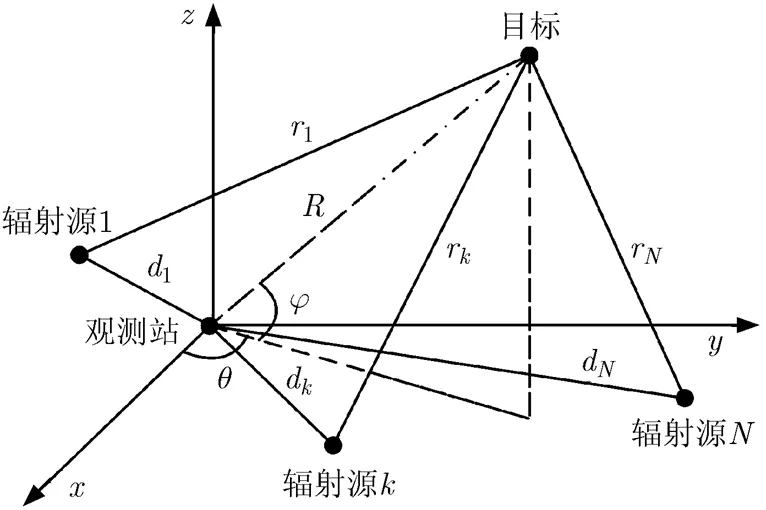
图 1 单站无源相干定位模型
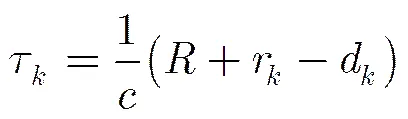
以观测站为原点,建立空间直角坐标系。目标位置为待估参量,外辐射源位置已知为。目标到观测站的距离为,外辐射源到观测站的距离为,目标到外辐射源的距离为。假设信号传播速度为,则外辐射源的直达信号与其经过目标反射后的回波信号到达观测站的时差为
(2)
不难证明到达角度和时差的观测方程可以转化为如式(3)的线性形式:
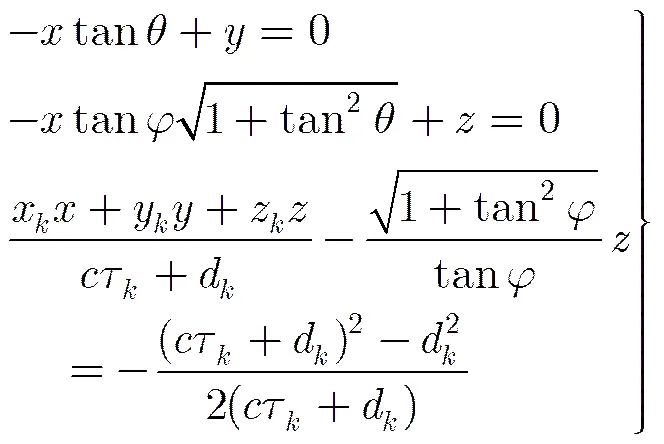
将该线性方程组表示成矩阵形式为
(4)
式中,
3 定位算法
3.1矩阵病态问题分析
在不考虑观测误差的情况下,对于式(4)中的线性方程组,其最小二乘解为

然而,以目标高度较低时的情形为例:当目标的坐标很小,近似为0时,的值近似为0,从而导致矩阵中的第3列元素,此时矩阵出现近似于式(7)中右侧矩阵的病态性。
(7)
此时目标位置的求解即为一个病态的求逆问题。而对于病态求逆问题,系数矩阵或数据矩阵的微小误差,会引起方程组解的巨大偏差。为克服方程求解的病态问题,本文采用正则化约束总体最小二乘算法估计目标位置。
3.2基于RCTLS的DOA-TDOA定位算法

(9)
式中,

(11)
其中,
(12)
将式(9)代入式(8),并移项整理,得

求解目标位置的正则化约束总体最小二乘解,即在满足式(13)约束下,确定一个合适的解向量,使得目标函数最小。令,那么RCTLS问题的数学表示为
(14)

(16)
(18)

对式(20)求解,得到牛顿迭代公式为
(21)
4 性能分析
4.1 理论误差
本节通过一阶小噪声扰动分析方法来推导RCTLS算法的理论误差。设正则化约束总体最小二乘解与目标位置真实值之间的误差为,即

(23)
式中:
(25)
忽略式(25)中的二阶及以上误差项,得

(27)
从式(28)可以看出,RCTLS算法的理论误差是关于正则化参数的函数。当时,式(28)即为CTLS算法的理论误差。设约束总体最小二乘解的误差为,则将代入式(28),可以得到CTLS算法的理论误差为
(29)
这与文献[11]中的推导结果一致。
4.2正则化参数分析
(31)

(34)
(36)
5 仿真实验
本节通过仿真实验评估本文算法的定位性能,并分析影响算法性能的因素。仿真场景设置如下:场景中有1个固定目标,8个待选的外辐射源,其位置如表1所示。到达角度和时差的测量误差设置为服从零均值的高斯分布。根据文献[17]和文献[18],将到达角度测量误差标准差设置为,到达时差测量误差标准差设置为10~105ns。

表1外辐射源位置
算法的定位误差为5000次蒙特卡洛仿真的均方根误差。其定义为
仿真1 不同测量条件下算法的定位误差
为了评估本文算法的估计性能,在不同的测量条件下,利用本文算法进行仿真定位实验,统计算法定位的均方根误差,并将其与LS, TLS, CTLS算法及CRLB对比。外辐射源选取表1中的第1~4个外辐射源。目标位置设置为会出现矩阵病态的低空情况和不会出现矩阵病态的一般情况:低空目标设置为坐标相对,坐标非常小,位置为;非低空目标位置设置为。仿真结果如图2所示。
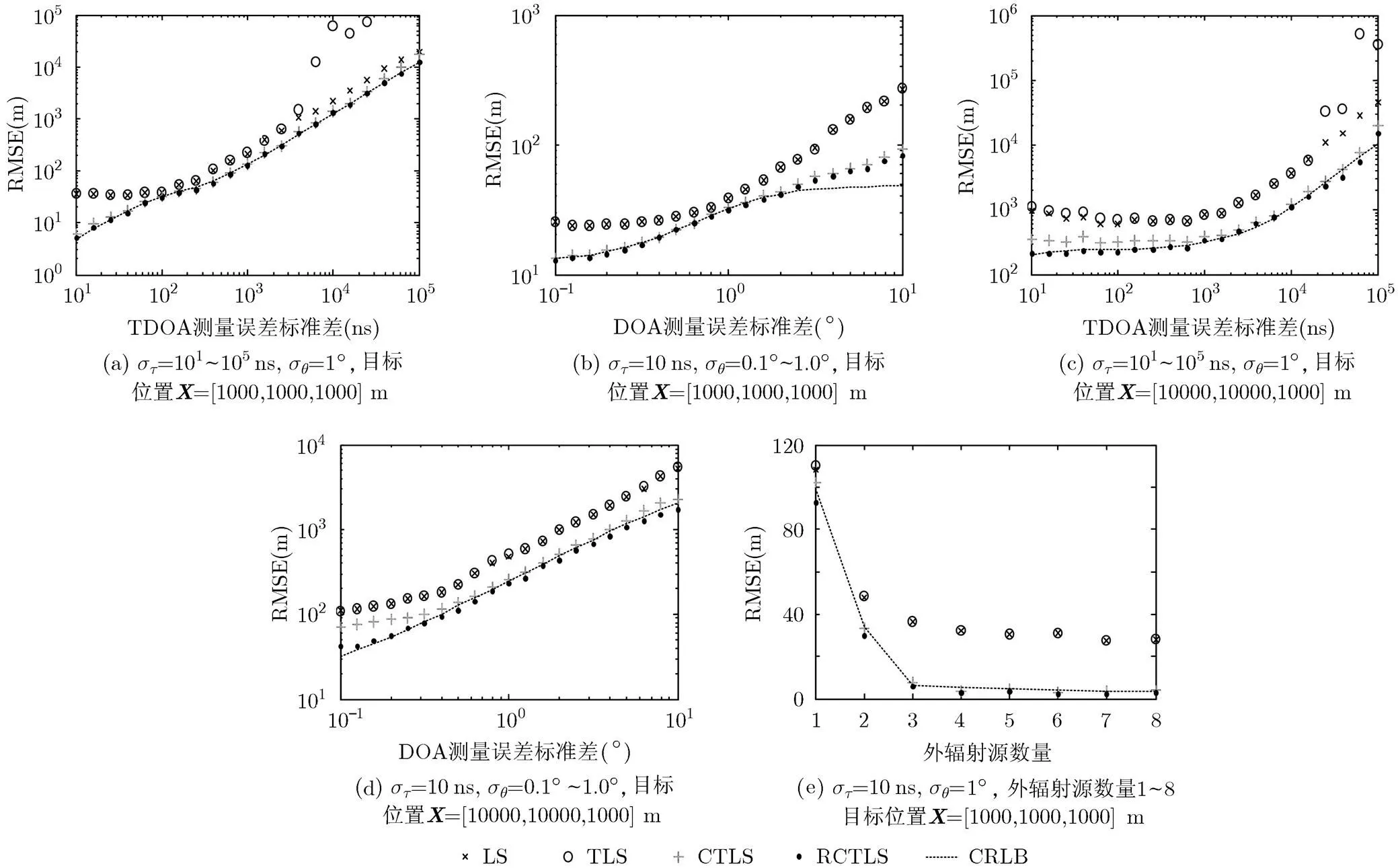
图2 不同测量条件下算法的定位误差
图2(a)和图2(b)给出了算法在一般情况下目标定位的均方根误差情况。可以看出,LS和TLS算法达不到CRLB。CTLS算法和本文算法的定位精度均可逼近CRLB,且本文算法的定位精度高于CTLS算法,在部分测量误差条件下本文算法的定位误差甚至低于CRLB。CRLB是无偏估计算法估计误差的理论下界,对于无偏估计算法而言,只能无限趋近,不能超越。但是RCTLS算法作为一种有偏估计算法,其通过牺牲算法的无偏性来换取算法均方根误差指标的显著改善,从而使得算法在一些测量误差条件下的RMSE可以低于CRLB。文献[19]表明,有偏估计算法通过牺牲算法的无偏性,其RMSE指标可以突破CRLB的限制。
图2(c)和图2(d)给出了算法对低空目标定位的均方根误差情况。在目标高度很低时,LS, TLS, CTLS算法的定位误差均较大,偏离CRLB的程度也较大。本文算法的定位精度相比以上3种算法,定位精度优势更加明显。此外,上述3种算法在测量误差很小时,偏离CRLB的较为严重,原因在于当测量误差较小时,矩阵的病态较为严重,而当测量误差增大时,受测量误差的影响,矩阵的病态性得到改善,偏离CRLB的程度也随之减小。相比之下,本文算法则在各种测量误差条件下均表现出了更加准确而鲁棒的定位精度。
图2(e)给出了算法定位误差随外辐射源数量变化的情况。可以看出,随着外辐射源数量的增加,几种算法的定位性能均有改善。这是由于增加外辐射源数量可以增加观测方程的数量,从而提高目标位置解的估计精度。LS算法和TLS算法定位误差较大,无法达到CRLB。CTLS算法和本文RCTLS算法的定位误差随着外辐射源数量增加不断逼近CRLB,且本文RCTLS算法的定位精度更高。
仿真2 几何精度因子(GDOP)图
系统几何精度因子(Geometric Dilution Of Precision, GDOP)也是衡量系统定位性能的重要指标,其定义为,其中分别为目标位置估计在方向上的误差。根据式(28)中估计误差的均方误差,有
(39)
为分析目标位置对系统估计精度的影响,需要画出不同目标位置上的GDOP等高线图。但目标位置有3个坐标变量,而GDOP等高线图是2维的。为此,分别展示目标高度为100 m和10000 m时,系统的GDOP等高线图。外辐射源选取表 1中的第1~4个外辐射源。角度测量误差标准差设置为,4个外辐射源对应的到达时差测量误差标准差分别设置为0.1 ns, 1 ns, 10 ns, 100 ns。
图3给出了目标高度分别为100 m和10000 m的GDOP图。可以看出,在,坐标相同时,目标高度越高,定位误差越小。当目标位于外辐射源和观测站所在的中央区域上方时,定位精度最高,随着目标远离该中心区域,定位误差增大,且在观测站和外辐射源连线方向,定位误差增加相对较快。而不同外辐射源对应的测量误差之间的差异性,对于系统定位精度的相对分布的影响并不显著。
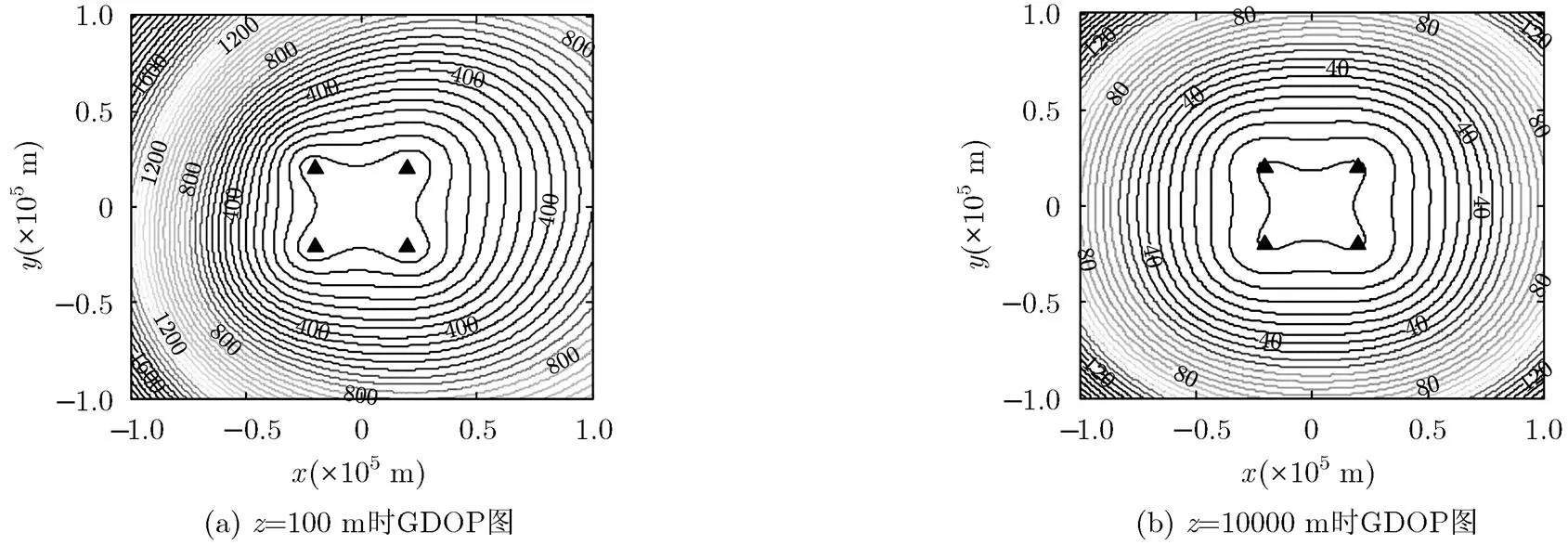
图3 定位系统的GDOP图
6 结论
本文研究了利用外辐射源的单站无源相干定位问题,提出了一种联合角度和时差的正则化约束总体最小二乘定位方法。本文的主要工作包括:(1)以目标高度极低时为例,分析了定位方程中可能出现的病态问题。(2)考虑定位方程中各项系数的误差,采用正则化约束总体最小二乘算法得到目标位置的高精度估计。(3)通过仿真实验,表明RCTLS算法具有比CTLS算法更高的定位精度和鲁棒性。(4)对系统GDOP图的分析表明,目标相对于外辐射源和观测站的位置对定位精度有显著影响。目标位于外辐射源和观测站所在的中央区域上方,且高度较高时,定位效果最好。
此外,本文算法针对的是量测-目标之间匹配关系明确的单目标定位场景。当问题扩展到多目标场景时,量测-目标之间的匹配关系未知,此时可通过一些数据关联算法[20],得到量测-目标之间匹配关系后,即可利用本文算法对目标定位。
[1] LIU Jun, LI Hongbin, and HIMED B. On the performance of the cross-correlation detector for passive radar applications[J]., 2015, 113: 32-37.doi: 10.1016/j.sigpro. 2015.01.006.
[2] WANG H, WANG J, and ZHONG L. Mismatched filter for analogue TV-based passive bistatic radar[J].&, 2011, 5(5): 573-581.doi: 10.1049/ iet-rsn.2010.0136.
[3] MICHAEL E, ALEXANDER S, and FABIENNE M. Design and performance evaluation of a mature FM/DAB/DVB-T multi-illuminator passive radar system[J].,&, 2014, 8(2): 114-122.doi: 10.1049/iet-rsn. 2013.0162.
[4] ZEMMARI R, BROETJE M, BATTISTELLO G,GSM passive coherent location system: performance prediction and measurement evaluation[J].,&, 2014, 8(2): 94-105.doi: 10.1049/iet-rsn.2013. 0206.
[5] FALCONE P, COLONE F, MACERA A,Two-dimensional location of moving targets within local areas using WiFi-based multistatic passive radar[J].,&, 2014, 8(2): 123-131.doi: 10.1049/iet-rsn.2013.0207.
[6] WEISS A. On the accuracy of a cellular location system based on RSS measurement[J]., 2003, 52(6): 1508-1518.doi: 10.1109/TVT.2003.819613.
[7] ZHONG Yu, WU Xiaoyan, and HUANG Caishu. Geometric dilution of precision for bearing-only passive location in three-dimensional space[J]., 2015, 51(6): 518-519.doi: 10.1049/el.2014.3700.
[8] WU Panlong, LI Xingxiu, ZHANG Lianzheng,Passive location using TDOA measurements from compass satellite illuminators[J]., 2015, 17(2): 722-728.doi: 10.1002/asjc.904.
[9] GABER A and OMAR A. A study of wireless indoor positioning based on joint TDOA and DOA estimation using 2-D matrix pencil algorithms and IEEE 802.11ac[J]., 2015, 14(5): 2440-2454.doi: 10.1109/TWC.2014.2386869.
[10] 李晶, 李冬海, 赵拥军. 利用角度和时差的单站外辐射源定位方法[J]. 武汉大学学报(信息科学版), 2015, 40(2): 227-232.doi: 10.13203/j.whugis20130065.
LI Jing, LI Donghai, and ZHAO Yongjun. Single-observer passive coherent location estimation based on DOA and TDOA[J]., 2015, 40(2): 227-232.doi: 10.13203/j.whugis 20130065.
[11] LI Jing, ZHAO Yongjun, and LI Donghai. Accurate single-observer passive coherent location estimation based on TDOA and DOA[J]., 2014, 27(4): 913–923.doi: 10.1016/j.cja.2014.06.004.
[12] 顾勇为, 归庆明, 张璇, 等. 大地测量与地球物理中病态性问题的正则化迭代解法[J]. 测绘学报, 2014, 43(4): 331-336.doi: 10.13485/j.cnki.11-2089.2014.0049.
GU Yongwei, GUI Qingming, ZHANG Xuan,Iterative solution of regularization to ill-conditioned problems in geodesy and geophysics[J]., 2014, 43(4): 331-336.doi: 10.13485/j.cnki.11-2089. 2014.0049.
[13] MESAROVIC V, GALATSANOS N, and KATSAGGELOS A K.Regularized constrained total least squares image restoration[J]., 1995, 4(8): 1096-1108.doi: 10.1109/83.403444.
[14] FAN X, YOUNAN N, and TAYLOR C. A perturbation analysis of the regularized constrained total least squares[J]., 1996, 43(2): 140-142.doi: 10.1109/82.486461.
[15] 王振杰. 大地测量中不适定问题的正则化解法研究[D]. [博士论文], 中国科学院测量与地球物理研究所, 2003: 25-54.
WANG Zhenjie. Research on the regularization solutions of ill-posed problems in geodesy[D]. [Ph.D. dissertation], Istitute of Geodesy and Geophysics, 2003: 25-54.
[16] LI Wanchun, WEI Ping, and XIAO Xianci. A robust TDOA-based location method and its performance analysis[J].:, 2009, 52(5): 876–882.doi: 10.1007/s11432-009-0101-1.
[17] 梁浩, 崔琛, 代林, 等. 基于ESPRIT算法的L型阵列MIMO雷达降维DOA估计[J]. 电子与信息学报, 2015, 37(8): 1828-1835.doi: 10.11999/JEIT141295.
LIANG Hao, CUI Chen, DAI Lin,Reduced-dimensional DOA estimation based on ESPRIT algorithm in MIMO radar with L-shaped array[J].&, 2015, 37(8): 1828-1835.doi: 10.11999/JEIT 141295.
[18] LI Jing, ZHAO Yongjun, and LI Donghai. Passive multipath time delay estimation using MCMC methods[J].,, 2015, 34(12): 3897-3913.doi: 10.1007/s00034-015-0037-1.
[19] SENGIJPTA S K. Fundamentals of statistical signal processing: Estimation theory[J]., 1995, 37(4): 465-466.doi: 10.1080/00401706.1995.10484391.
[20] 李猛, 王智, 李元实, 等. 角度传感器网络多目标定位的数据关联算法[J]. 电子学报, 2014, 42(10): 1887-1893. doi: 10.3969/jissn.0372-2112.2014.10.003.
LI Meng, WANG Zhi, LI Yuanshi,. Data association in multi-target localization using bearing-only sensor networks [J]., 2014, 42(10): 1887-1893. doi: 10.3969/jissn.0372-2112.2014.10.003.
Single-observer Passive DOA-TDOA Location Based on Regularized Constrained Total Least Squares
ZHAO Yongjun ZHAO Yongsheng ZHAO Chuang
(School of Navigation and Aerospace Engineering, PLA Information Engineering University, Zhengzhou 450001, China)
To solve the single-observer passive location estimation using illuminators of opportunity, a jointing Direction Of Arrival (DOA) and Time Difference Of Arrival (TDOA) location method based on Regularized Constrained Total Least Squares (RCTLS) algorithm is proposed. Firstly, the DOA and TDOA measurement equations are linearized. Considering the errors in the location equations, the localization problem is established as a RCTLS model. Then the Newton’s method is applied to solving the RCTLS model to obtain the target position. The theoretical error of the proposed algorithm is derived and an optimal regularization parameter is chosen by the least mean square error rule. Simulation results show that the proposed RCTLS algorithm has lower mean squares error than the Constrained Total Least Squares (CTLS) algorithm. Moreover, from the Geometric Dilution Of Precision (GDOP) figure, it can be concluded that positions of the target and illuminators are also important factors affecting the localization accuracy.
Passive location; DOA and TDOA; Single-observer; Illuminator of opportunity; Regularized Constrained Total Least Squares (RCTLS)
TN971
A
1009-5896(2016)09-2336-08
10.11999/JEIT151379
2015-12-08;
2016-04-27;
2016-06-24
国家自然科学基金(61401469, 41301481, 61501513),国家高技术研究发展计划(2012AA7031015)
The National Natural Science Foundation of China (61401469, 41301481, 61501513), The National High Technology Research and Development Program of China (2012AA7031015)
赵拥军 zhaoyongjuntg@126.com
赵拥军: 男,1964年生,教授,博士生导师,研究方向为无源定位、阵列信号处理.
赵勇胜: 男,1990年生,硕士生,研究方向为无源定位.
赵 闯: 男,1978年生,副教授,研究方向为雷达信号处理.