基于改进射影控制的互联系统附加励磁控制器设计
2016-10-13张英敏李兴源
郭 磊,张英敏,李兴源
基于改进射影控制的互联系统附加励磁控制器设计
郭 磊,张英敏,李兴源
(四川大学电气信息学院,四川 成都 610065)
针对大型互联网络区域间存在低频振荡现象,且一般设计出的附加励磁控制器阶数高、控制效果不理想,在射影控制基础上做出改进,设计出改进射影控制器应用于互联系统的附加励磁控制。首先通过总体最小二乘-旋转不变技术参数估计算法辨识出系统的振荡模态;根据极点配置得到系统的状态反馈矩阵。然后利用射影控制原理,在射影控制器保留阶主导特征值基础上,又保留了阶特征值。通过对可调矩阵0的调节控制系统干扰矩阵的特征值范围,降低系统原有振荡模式的影响。在PSCAD/EMTDC中的一个四机两区域模型中对无附加控制器、基于观测器-控制器和改进射影控制器控制下的系统进行短路故障和不同时滞下的仿真实验。结果表明,所设计出的改进射影控制器具有更好的阻尼特性和动态效果,且受时滞变化影响较小,具有较好的工程实践性。
低频振荡;附加励磁控制;改进射影控制;主导特征值;阻尼特性;时滞
0 引言
随着互联电力系统规模的增大及其运行方式的日益复杂,区域内和区域间的低频振荡时有发生,限制了电网的传输能力,给电力系统的安全和稳定运行带来了很大的挑战,因此对抑制低频振荡问题的研究显得格外重要[1-3]。经典电力系统稳定器以本地信号作为反馈信号,不能很好地反映区域间的振荡模式,对抑制区域间的低频振荡效果并不明显。应用广域阻尼控制从互联系统中选择最优的控制器落点和反馈信号,能够更好地反映区域间的振荡模式,为抑制区域间低频振荡提供强有力的工具[4-5]。
文献[6]通过设计附加励磁控制器来提高互联电力系统的稳定性,但其集中在对次同步振荡的抑制。文献[7]利用降阶辨识方法辨识出被控电力系统的降阶模型,设计出发电机附加励磁控制器,抑制了川渝联络线上的功率振荡,但对低频振荡的抑制效果不太理想。文献[8]提出一种基于果蝇优化算法的广域阻尼控制器设计方法。该方法在一定程度上能对低频振荡进行抑制,但控制器阶数过高,会影响控制器的实用性和有效性。文献[9]采用自抗扰控制方法抑制低频振荡,提高了互联系统的阻尼,但未考虑广域信号时滞影响。文献[10-11]利用射影控制理论保留参考系统的主导特征值,设计了用于高压直流系统阻尼控制的降阶模型,能够抑制系统的低频振荡,但将所有的设计自由度都用于保留系统的阶特征值,射影控制器控制下的系统性能受到局限。改进射影控制器保留参考系统的阶特征值,对系统低频振荡进行抑制,具有阶数低、鲁棒性和控制品质效果好的优点,解决了现有抑制低频振荡的附加阻尼控制器存在的一些问题。
本文根据射影控制原理并做出改进,设计出改进射影控制器用于互联系统的附加励磁控制,实现抑制低频振荡和提高电网动态性能。首先通过TLS-ESPRIT算法辨识出系统的振荡模态和传递函数;根据射影控制理论,在保留闭环系统阶主导特征值基础上,对待求控制器状态方程进行改进,又保留阶特征值,设计出系统的改进射影附加励磁控制器。在PSCAD/EMTDC的一个四机两区域模型中对无附加励磁控制器、基于观测器-控制器和改进射影控制器控制下的系统进行短路故障和不同时滞下的仿真实验。结果表明,所设计出的改进射影控制器较基于观测器控制下系统具有更好的阻尼特性和动态效果、受时滞影响较小。改进射影控制器阶数低、鲁棒性好,具有一定的工程实践价值。
1 改进射影控制理论
不考虑时滞的影响,电力系统可以建模为高阶的微分代数方程组,消去其中的代数变量,则系统可以建模为全阶的微分方程。经过对其进行线性化可得系统的状态空间表达式为


定义0,则期望的特征方程为
(2)
由于凯莱-哈密尔顿定理阐明应满足其自身的特征方程,故

根据爱克曼公式[12]得状态反馈矩阵为
射影控制理论可用于设计高压直流输电系统的附加阻尼控制器和附加励磁控制器,能够有效地抑制互联电网区域内和区域间振荡。其主要思想是在保留参考全状态闭环系统主导特征值的前提下,将控制器映射为低阶静态或动态输出反馈控制器[13]。
由射影定理得,若0为非奇异矩阵,则其特征值可分解为

假设待求的射影控制器具有状态方程:

(5)
由式(1)、式(4)、式(5)得

(7)
射影控制器的缺点是把所有的设计自由度都用于保留系统的阶特征对,故射影控制器可能不满足系统性能要求。于是文中在射影控制器的基础上引进一个阶特征对,用于保留系统的其他性能,构成保留阶特征对的改进射影控制器[14]。

由式(3)得

由式(8)、式(9)得
(10)

又(11)
式(11)中,

(12)

证明:


2 控制器设计
文中采用一个四机两区域系统模型进行仿真,其网络结构如图1。

图1 四机两区域系统网络结构图
图1中,G1、G2、G3、G4为包含调速器、励磁器的发电机,其均采用带衰减的高暂态增益晶闸管励磁。
考虑到附加阻尼控制所采用的信号为广域信号,其在采集和传输过程中存在时滞问题,需要在系统中添加延时环节,延时环节采用pade逼近表达式[15]表示为
文中采用100 ms时滞,其二阶pade表达式为
TLS-ESPRIT算法可利用电力系统测量数据或者时域仿真数据分析电力系统的低频振荡问题,进而通过振荡信号来辨识系统低频振荡信息。相较于Prony算法,TLS-ESPRIT算法具有更强的抗噪、抗干扰能力,并且具有较高的计算效率[16-17]。
首先通过TLS-ESPRIT算法辨识出系统的低频振荡模态和传递函数。方法为:以发电机G1励磁系统的s为输入信号,以发电机G1和发电机G3机端的转子角速度差为输出信号;当四机两区域系统达到稳定状态时,在输入信号处施加0.02倍参考信号ref的扰动。
然后根据辨识出的系统振荡模态和传递函数,利用改进射影控制理论设计出用于互联系统的附加励磁控制器。以发电机G1和发电机G3机端的转子角速度差为输入信号,为滤除输入信号中的直流分量,需要增加一个时间常数为10的隔直环节,另外添加一个限幅环节。则发电机G1端的附加励磁控制器结构图如图2所示。
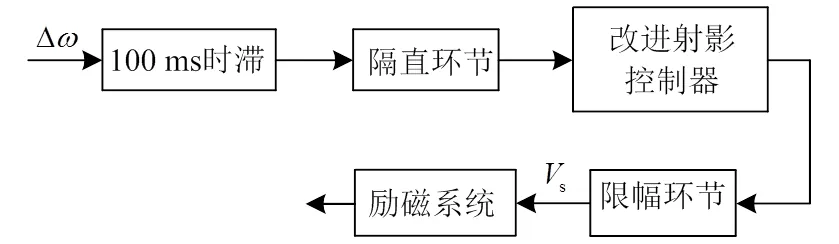
图2 附加励磁控制器结构图
改进射影控制器设计方法:
(1) 文中取系统阶数为9,利用TLS-ESPRIT辨识和基于Ackermann公式的极点配置方法,得闭环系统的状态反馈增益矩阵0=[-2.7 -13.7 -146.7 -426.3 -1359.8 -2170.4 -722.5 -590.8 -131.1]。
(2) 根据辨识出的系统模型,通过[,]=eig (+0)得到闭环系统的特征值及阻尼比如表1。

表1 闭环系统特征值及阻尼比
(3) 从闭环系统的特征值中保留阶特征值。选择距离虚轴较近,阻尼比较小的阶主导特征值(此处取=2,即阻尼比为10.8%的一对特征值)。由于阶主导特征值设计出的控制器不够精确,故另外有选择地选取阶特征值为主导特征值。
(4) 选择合适的矩阵0,对干扰矩阵引入的特征值范围进行限定,减少干扰矩阵对基于改进射影控制的闭环反馈系统的影响。
(5) 通过[num, den]=ss2tf (c,c,c,c)、pj-controller=tf (num, den)指令将改进射影控制理论中的状态空间表示形式转化为传递函数形式。
3 仿真分析
为了比较改进射影控制器的控制效果,根据状态观测器理论设计出基于观测器的控制器。本文在励磁增益A=20时,对无附加励磁控制、状态观测器和改进射影控制下系统的振荡模态进行辨识,得到三种情况下各自的振荡频率、阻尼比、衰减因子和相位如表2所示。

表2 励磁增益KA=20时系统的振荡模态
从表2中可以看出,系统在无附加励磁控制器作用下阻尼较弱;加入状态观测器后,系统的阻尼特性得到一定的提高;由于保留阶特征值,改进射影控制器控制的系统能够在频率为0.507 4 Hz和1.068 7 Hz时产生较大的阻尼作用,较状态观测器控制下系统能更好地抑制低频振荡,有较好的阻尼特性。可见通过改进射影控制器进行抑制可获得较好的效果。
3.1 三相接地短路仿真
系统在20 s时发生三相接地短路故障,持续时间为0.1 s,无附加励磁控制、状态观测器控制和改进射影控制器控制下系统流向8号母线的有功功率和1、3机端转子角速度差的仿真图如图3和图4。
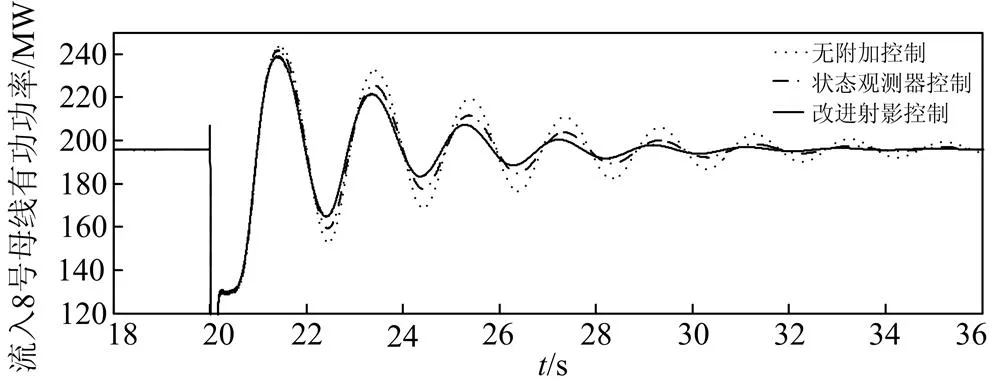
图3 流入8号母线的有功功率
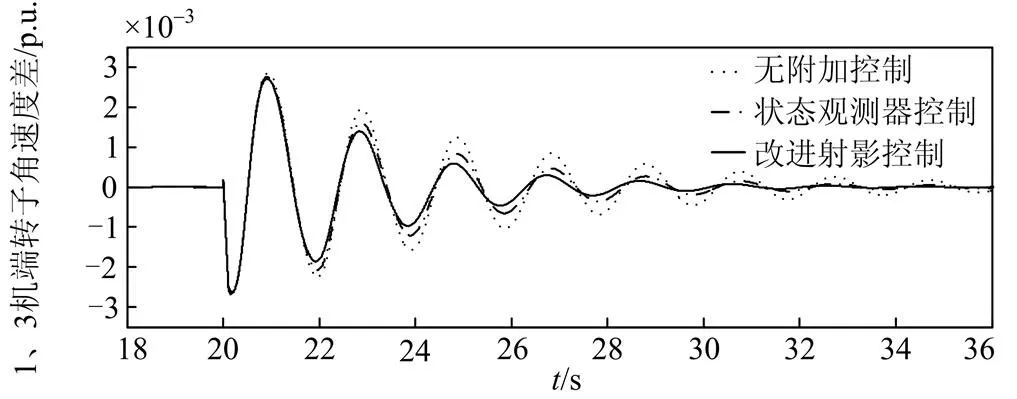
图4 1、3机端转子角速度差
由图3、图4可见,在发生三相接地短路后无附加控制下的系统有较大幅度的波动,需要较长时间达到稳定状态。较状态观测器控制下的系统,基于改进射影控制器控制下的系统能够较快地达到稳定状态,具有更好的低频振荡抑制效果。原因在于改进射影控制可以利用保留阶主导特征值,能够对特定频次有选择地进行抑制,将状态反馈转换为输出反馈,能够减小误差的放大;而观测器在逼近状态反馈时会存在一定的误差。
3.2 单相接地短路仿真
系统在20 s时发生单相接地短路故障,持续时间为0.1 s,无附加励磁控制、状态观测器控制和改进射影控制器控制下系统流向8号母线的有功功率和1、3机端转子角速度差的仿真图如图5和图6。
由图5、图6可知,发生单相接地短路故障后改进射影控制下的系统阻尼特性比较好,原因在于改进射影控制保留了闭环系统的主导特征值,能够更好地对特定的低频振荡,并可有选择性地对另外一些频次进行抑制,改善了系统的动态特性。改进射影控制器和状态观测控制器控制下的系统对低频振荡的抑制效果差别不大,原因在于所采用的状态观测器已经经过大量仿真实验进行调试,具有较好的抑制效果。

图5 流入8号母线的有功功率

图6 1、3机端转子角速度差
3.3 不同时间延时下的仿真
当广域信号分别存在200 ms、500 ms时间延时,状态观测器和改进射影控制器控制下,1、3机端的转子角速度差振荡仿真如图7、图8所示。
由图3、图4、图7、图8可知,随着延时的增加,状态观测器和改进射影控制器控制下的系统1、3机端转子角速度差达到稳定所需时间越长。但改进射影控制器控制下的系统在500 ms时间延时下相对200 ms时间延时变化不大,仍具有较好的阻尼特性;但状态观测器控制下系统在500 ms延时时抑制低频振荡的效果已经较弱。可见改进射影控制器在不同延时下较状态观测器有更好的阻尼效果。
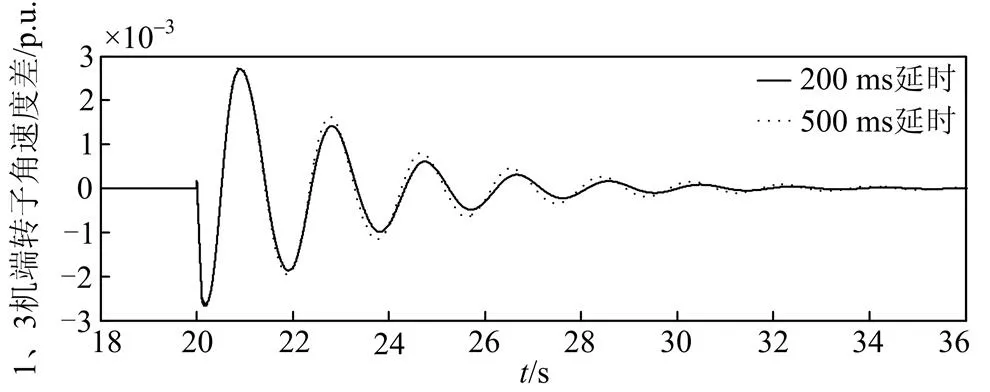
图8 改进射影控制器控制下转子角速度差
4 结论
本文根据射影控制理论,通过对射影控制改进,提出一种具有控制阶数低和良好控制品质的方法应用于互联系统的附加励磁控制器设计。首先通过TLS-ESPRIT算法辨识出系统的振荡模态和传递函数;然后根据射影控制理论,在射影控制基础上,对待求控制器状态方程做出改进,设计出保留了阶特征值的改进射影控制器。在PSCAD/ EMTDC中的一个四机两区域模型中对无附加控制器、基于观测器-控制器和改进射影控制器控制下的系统进行故障和不同时滞下的仿真。结果表明,所设计出的改进射影附加励磁控制器较基于观测器控制下系统有更好的阻尼特性和动态效果、受时滞变化影响较小。同时改进射影附加励磁控制器阶数低、鲁棒性好,具有一定的工程实践价值。
[1] ROGERS G. Power system oscillations[M]. Boston: Kluwer Academic Publishers, 2000: 101-118.
[2] 顾威, 李兴源, 陈建国, 等. 基于瞬时无功理论的SVC抑制次同步振荡的附加控制设计[J]. 电力系统保护与控制, 2015, 43(5): 107-111.
GU Wei, LI Xingyuan, CHEN Jianguo, et al. Additional control design of SVC for mitigating subsynchronous oscillation based on instantaneous reactive power theory[J]. Power System Protection and Control, 2015, 43(5): 107-111.
[3] 项丽, 鲍颜红, 耿天翔. 基于广域信息的发电机电压控制抑制区间低频振荡方法[J]. 电力系统保护与控制, 2015, 43(18): 18-22.
XIANG Li, BAO Yanhong, GENG Tianxiang. Damping inter-area low frequency oscillations method for generator voltage control based on wide-area information[J]. Power System Protection and Control, 2015, 43(18): 18-22.
[4] 李婷, 吴敏, 何勇. 计及广域测量系统时滞影响的灵活交流输电系统阻尼控制器多目标设计[J]. 电工技术学报, 2014, 29(8): 227-234.
LI Ting, WU Min, HE Yong. Multi-objective design of FACTS damping controller based on WAMS with signal transmission delay[J]. Transactions of China Electrotechnical Society, 2014, 29(8): 227-234.
[5] 古丽扎提·海拉提, 王杰. 多时滞广域测量电力系统稳定分析与协调控制器设计[J]. 电工技术学报, 2014, 29(2): 279-289.
GULIZHATI Hailati, WANG Jie. Multiple time delays analysis and coordiated stability control for power system wide area measurement[J]. Transactions of China Electrotechnical Society, 2014, 29(2): 279-289.
[6] 张远取, 谢小荣, 姜齐荣. 应用附加励磁阻尼控制抑制HVDC引起的次同步振荡[J]. 电力系统保护与控制, 2010, 38(4): 1-5.
ZHANG Yuanqu, XIE Xiaorong, JIANG Qirong. Application of supplementary excitation damping control for suppression of subsynchronous oscillation caused by HVDC[J]. Power System Protection and Control, 2010, 38(4): 1-5.
[7] 陆超, 程云峰, 王颖, 等. 发电机附加励磁控制在增加四川电网外送容量中的应用[J]. 电网技术, 2014, 38(8): 2044-2050.
LU Chao, CHENG Yunfeng, WANG Ying, et al. Applicationof generator supplementary excitation control in increasing the power transmission capacity of Sichuan power grid[J]. Power System Technology, 2014, 38(8): 2044-2050.
[8] 刘宇凯, 胡志坚, 索江镭, 等. 基于果蝇优化算法的广域阻尼控制器设计[J]. 电力系统保护与控制, 2014, 42(24): 25-29.
LIU Yukai, HU Zhijian, SUO Jianglei, et al. Design method of wide-area damping controller based on FOA algorithm[J]. Power System Protection and Control, 2014, 42(24): 25-29.
[9] 李从善, 刘天琪, 刘利兵. 直流多落点系统自抗扰附加阻尼控制[J]. 电工技术学报, 2015, 30(7): 10-17.
LI Congshan, LIU Tianqi, LIU Libing, et al. A auto-disturbance rejection controller of multi-HVDC[J]. Transactions of China Electrotechnical Society, 2015, 30(7): 10-17.
[10] 郭磊, 张英敏, 李兴源. 多通道高压直流广域改进射影控制器设计[J]. 电力系统保护与控制, 2016, 44(4): 29-35.
GUO Lei, ZHANG Yingmin, LI Xingyuan. Design of multi-channel wide area modified projective controller for HVDC transmission system[J]. Power System Protection and Control, 2016, 44(4): 29-35.
[11] 郭磊, 张英敏, 李兴源. 基于改进射影控制的柔性直流输电广域阻尼控制[J]. 电测与仪表, 2015, 52(22): 1-7.
GUO Lei, ZHANG Yingmin, LI Xingyuan. VSC-HVDC wide-area damping controller design based on improved projective control[J]. Electrical Measurement & Instrumentation, 2015, 52(22): 1-7.
[12] OGATA K. Modern control engineering[M]. New Jersey: Prentice Hall, 2010: 612-620.
[13] WISE K A, NGUYEN T. Optimal disturbance rejection in missile autopilot design using projective controls[C] // IEEE Proceeding of the 30th Conference on Decision and Control, Brlghton, England, December, 1991.
[14] RAMAKER R A. The design of low order controllers using the Frobenius-Hankel norm[D]. Urbana, IL: University of Illinois, 1990.
[15] 王成山, 石颉. 考虑时间延迟影响的电力系统稳定器设计[J]. 中国电机工程学报, 2007, 27(10): 1-6.
WANG Chengshan, SHI Jie. PSS designing with consideration of time delay impact[J]. Proceedings of the CSEE, 2007, 27(10): 1-6.
[16] 李红蕾, 冯英, 袁召, 等. 基于Prony的故障电流相控分断零点预测算法[J]. 高压电器, 2014, 50(9): 29-34.
LI Honglei, FENG Ying, YUAN Zhao, et al. Prediction algorithm for phase-controlled fault interruption based on Prony method[J]. High Voltage Apparatus, 2014, 50(9): 29-34.
[17]董超, 陈晓东, 王波. 一种综合分析算法在电网低频振荡振型快速估计中的应用[J]. 电网与清洁能源, 2014, 30(4): 1-6.
DONG Chao, CHEN Xiaodong, WANG Bo. Application of an integrated analysis algorithm in rapidly estimating mode shape of low frequency oscillation for the power grid[J]. Power System and Clean Energy, 2014, 30(4): 1-6.
(编辑 魏小丽)
Supplementary excitation controller design of interconnected power system based on modified projective control
GUO Lei, ZHANG Yingmin, LI Xingyuan
(School of Electrical Engineering and Information, Sichuan University, Chengdu 610065, China)
In allusion to the phenomena of inter-area low frequency oscillation in the big interconnected power system, also, high order of the general supplementary excitation controllers and unsatisfactory control effects exist, a modified projective controller on the basis of projective control is designed and used in the control of supplementary excitation. The oscillation modals are identified by the TLS-ESPRIT algorithm firstly; according to the pole-placement theory, the state feedback matrix of the system is identified; then retainingorder dominant eigenvalue on the basis of the projective control withorder eigenvalue retained; by regulating the adjustable matrix0to control the eigenvalue bounds of interference matrixto reduce the influence of original oscillation mode to the system. Simulations of three-phase grounding, one-phase grounding faults and different time delays are done to the system in a model of four machine two domains system without additional controller, with controller based on state observer and modified projective controller in PSCAD/EMTDC. The results validate that the system controlled by the modified projective controller has better damping character and dynamic performance, fewer effects caused by different time delays, and better engineering practice. This work is supported by National Natural Science Foundation of China (No. 51037003) and Major Special Projects of Large Power Grid Planning and Operation Control Technology of State Grid Corporation of China (No. SGCC- MPLG027-2012).
low frequency oscillation; supplementary excitation control; modified projective control; dominant eigenvalue; damping character; time delay
10.7667/PSPC150307
国家自然科学基金重点项目(批准号:51037003)、国家电网公司大电网规划与运行控制技术重大专项(批准号:SGCC-MPLG027-2012)资助的课题
2015-03-02;
2015-10-22
郭 磊(1990-), 男, 硕士研究生, 研究方向为高压直流输电、电力系统稳定与控制;E-mail: gleisky@163.com张英敏(1974-), 女, 博士, 副教授, 硕士生导师, 研究方向为高压直流输电、电力系统稳定与控制;李兴源(1945-), 男, 博士, 教授, 博士生导师, 中国电机工程学会电力系统专委会委员, IEEE高级会员, 研究方向为电力系统稳定与控制、高压直流输电、分布式发电等。
