一种证据理论方法在数控机床故障诊断中的应用
2016-10-13方凯刘凌云罗敏陈志楚
方凯,刘凌云,罗敏,陈志楚,3
(1.湖北汽车工业学院电气与信息工程学院,湖北十堰442002;2.西安交通大学电子与信息工程学院,陕西西安710049;3.华中科技大学机械科学与工程学院,湖北武汉430074)
一种证据理论方法在数控机床故障诊断中的应用
方凯1,2,刘凌云1,罗敏1,陈志楚1,3
(1.湖北汽车工业学院电气与信息工程学院,湖北十堰442002;2.西安交通大学电子与信息工程学院,陕西西安710049;3.华中科技大学机械科学与工程学院,湖北武汉430074)
针对证据理论组合规则在数控机床故障诊断中所出现的反直观问题,提出了一种基于证据相容度的证据组合方法。根据证据相容性函数获得证据间相容度矩阵,归一化得到一致相容性度量,在此基础上得到相容系数的偏离度来表示证据的稳定性,联合证据的一致相容性和稳定性获得证据的权系数,采用D-S组合规则完成对证据的加权平均组合。该方法应用在某型国产数控机床的故障诊断中,实验结果和相关分析表明是合理的。
证据理论;相容度矩阵;证据冲突;数控机床;故障诊断
数控机床是典型的机电一体化复杂系统,是现代信息科学与传统机械技术相结合的产物,其故障模式随着各种新技术的不断应用发生了很大变化,因此故障诊断不能只依靠单个传感器或者单层信息,而应该融合系统结构和控制决策等多方面信息[1]。多源信息融合技术可以利用多传感器提供各类信息对数控机床进行实时监测,对运行状态进行预测、诊断和报警,从而可以大幅提高数控机床故障诊断的可信度。证据理论作为信息融合的主要方法,大量应用在各种装备的故障诊断中[2]。
证据理论首先由Dempster于1967年提出[3],后来由Shafer于1976年加以补充和发展[4],是一种有用的不确定性推理理论,可以融合不同传感器的信息,并且为不确定信息的表达和合成提供了一种有力的方法[5]。不同传感器提供的信息既有合理的,又有相互冲突的,这些信息对故障诊断结果的影响是不同的。因此,需要区别对待信息的冲突性。对于高置信度、低冲突的证据体可以完全吸收,为故障诊断提供可靠依据;对于低置信度、高冲突的证据体需要分析原因,进行适当修正和改进。
很多学者提出了各种证据理论改进方法,并在各领域故障诊断中得到应用。曹建福等[6]给出了基于证据理论的多类型故障识别模型,提出一种基于平均信任度的动态参数冲突证据合成方法,应用于具有非线性特性的高速装备故障诊断中。蔚晓丹等[7]提出一种基于证据理论的改进信息融合方法,将不同类型的故障诊断模型给出的诊断结果组成证据组,计算证据组中各证据之间冲突的程度,利用证据冲突系数对证据组进行分类,计算各高冲突证据的重要度,应用证据间距离函数来判定各证据的可信度并修正证据的权重,并将该方法应用于发动机非电控单元的故障诊断中。牛强军等[8]利用多个子模糊神经网络进行故障局部诊断,获得彼此独立的证据,采用贴进度方法判断可信度来修正权重,然后进行信息融合,将该方法应用在航电设备的故障诊断中。仝磊等[9]运用典型样本的数据融合方法对柴油机供油系统的3种故障进行诊断,避免了D-S证据理论应用中基本概率赋值难以分配的问题,减少了方法的主观性。在基于改进D-S组合规则的方法中,Yager[10]等人最早提出将冲突系数进行再分配,认为所有冲突均不能提供有用信息,因此把证据冲突全部赋给未知项,该方法将证据间的冲突全部否定,过于保守,而且会使合成后证据的不确定性增大,有时不符合证据推理的目的。孙权等[11]在Yager的基础上认为,即使证据间存在着冲突,也是部分可用的,在引入证据可信度概念的基础上,提出了新的证据合成公式,将总冲突按一定比例分配给所有证据的焦元集合。这种合成公式弥补了原有D-S合成公式所存在的不足。
本文中针对在数控机床故障诊断中,有效地解决高冲突证据融合问题,采用相容度函数对传感器所获得数据的相关性进行度量,根据相容度矩阵获得传感器的稳定性度量,然后利用该度量对每个证据的初始支持度进行修正以达到更加鲁棒的证据权重,最后进行加权组合,从而提高在实况诊断中的证据组合的可靠性和稳定性。
1 证据理论及存在的问题分析
1.1证据理论基础
证据理论中,非空集合Θ是辨识框架,它由一些互斥且穷举的元素组成,对于Θ中的元素A,都应该属于幂集2Θ,如果有
则称m为基本概率赋值(Basic Probability Assign⁃ment,简称BPA)函数。
假设m1、m2、…、mn分别是Θ的幂集上的基本概率赋值函数,则Dempster合成公式为

1.2存在的问题分析
要解决证据理论的冲突问题,有必要分析冲突的来源。引起冲突的原因是多方面的,包括识别框架的不完备、证据源的检测和识别能力有限、证据源不可靠和不稳定等。而合成规则假定所有的参与合成的证据具有相同的重要程度,在证据组合是没有考虑证据的可信度信息。事实上,不同的证据如传感器和领域专家具有不同的可信度。并且传感器的稳定性对组合结果是否稳定有着较大的影响。利用经典的证据组合规则常会产生与常理相悖的结果。
2 一种证据理论的改进
2.1改进后的证据理论算法
从改进的关注点不同,证据理论的改进方法大致可以分为2类:一类是重点针对组合规则进行修改;另一类重点对数据进行处理,增加数据的一致性,降低数据的冲突。本文中基于第2种改进方法,在对数据模型修改的基础上,采用D-S组合规则完成对证据的组合。一般受各种因素的影响,由传感器获得的量测数据与真值往往存在很大的差异。如果可以获得大量的量测数据,则有效数据应该分布在真值的某一特定区域内,这部分量测数据称为相容性证据;而分布在区域外的量测数据则认为存在很大的不可靠性,为大偏差数据。为度量数据集中程度特性,定义证据的可靠度,用证据的相容性来度量证据的可靠性程度。当证据相互支持程度越高,证据间的相容性程度越高;当证据的相互性支持程度越低,则证据的相容性程度越低。
一致性度量只能反映传感器与其它传感器观测数据的融合程度,并不能说明该传感器的稳定性。当传感器观测性能越稳定,则与其它传感器的相融程度的差异值越小,其相容度分布越均衡,在对精度要求严格的数据融合是十分必要的。
2.2证据理论改进步骤
假设系统收集到n个证据体,且m1和m2是辨识框架Θ上的2个BPA,则改进算法的步骤如下:
步骤1[12]假设m为辨识空间Θ上的BPA函数,与之相关的Pignistic概率函数BetPm:Θ→[ ]0,1定义为

式中:| A|表示集合A中包含的元素数目。
步骤2[13]假设为识别框架Θ上的BPA函数,BetPm1和BetPm2为对应的Pignistic变换后的概率函数,那么

就用来衡量证据焦元的差异性。
步骤3证据的相容度函数为

由式(6)可以看出:c的取值在[0,1],若c的取值越接近1,则传感器间的相容性越好,称为证据间的相容度高;当c的取值越接近0,则传感器的相容性越差,即证据间的相容度越低。
步骤4假设m1、m2为识别框架Θ上的BPA函数,则相容度矩阵为
对于相容度C的任意一行,其元素之和越大,说明该传感器的数据与其它传感器的数据更加接近。反之,说明该传感器与其它传感器的数据偏离。
步骤5定义其一致性度量为

式(8)只能说明一个传感器与其它传感器的相容性程度,即相互支持程度,不能度量一个传感器的是否稳定。一个传感器越稳定,它与其它传感器相容度数值的差异性就越小。
步骤6传感器的稳定性度量为
在实际融合过程中,应当充分利用可靠度高稳定性好的传感器的数据。即可靠性高且稳定性强的传感器数据在整个融合过程中的作用应该加强,而可靠性低且稳定差的传感器数据的作用应该减弱。
步骤7权重向量的定义如下:

对式(10)进行归一化可得

最后进行加权组合,完成D-S组合的合成。
3 在数控机床故障诊断中的应用
各种数控机床通常包括若干子系统,通过各种传感器,可以获得这些子系统在运行过程中的相关信息,进而反映当前机床的运行状态。证据理论通过对同一识别框架下的各证据体进行融合推理形成决策结果,能较好地处理数控机床故障诊断中的不确定性问题。基于改进证据理论的数控机床故障诊断模型如图1所示。

图1 数控机床故障诊断模型
选取经典的组合规则与本改进方法进行对比分析,完成国产某型数控机床的故障诊断,并分析故障诊断的差异。
3.1一般冲突性证据应用
设辨识框架Θ={A,B,C},A、B、C分别数控机床的机械故障、管路及密封故障、和电气故障,若通过2组传感器测得2个证据的基本概率赋值函数:

为检验2种合成规则对高冲突证据的合成效果,通过对数据进行融合,得到的结果如表1所示。
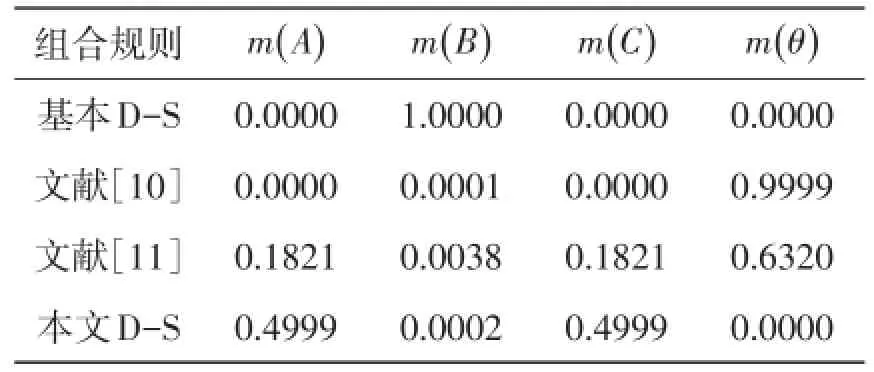
表1 一般冲突性证据分析比较
基本D-S组合方法得出是管路及密封故障,而改进D-S组合方法得出是恰恰相反,不是管路及密封故障,而应该是另外2种故障中的一种,显然不同组合方法的融合结果差异很明显。在没有对原始证据处理的情况下,传统的证据组合规则不能有效完成组合,在故障决策时将造成不可预知的错误,为决策提供了错误的指导。文献[11]虽然可以得到一个结果,但是很多信息赋值给了未知集合,这使得依据该组合结果依然不能做出快速有效的决策,文献[10]的方法更为偏激,将冲突信息全部赋值给未知集合,这将为决策带来更大的困难。而改进方法是一种加权平均然后采用传统组合规则进行组合,考虑了每一个焦元提供的信息,使得组合结果符合主观认识,不会出现传统组合规则在高冲突证据时的情况。因此改进D-S组合规则更加符合实际数控机床诊断的结果。
3.2综合故障诊断应用
假设4个证据体m1、m2、m3、m4分别是由光栅尺、霍尔传感器、感应同步器和电枢电流传感器测得相关数据得出的基本概率赋值函数,其中m(A)、m(B)和m(C)为识别目标A机械故障、B管路及密封故障和C电气故障的基本概率赋值函数:

4个证据体的相容度矩阵为
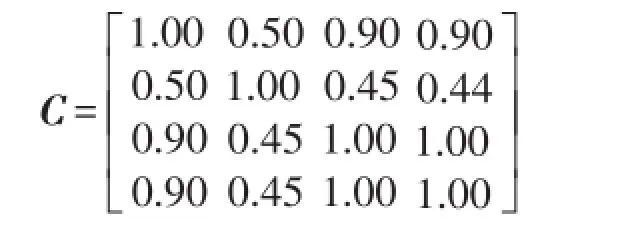
其一致性度量为

传感器稳定性度量为

则可得4个证据体的权系数:

采用几种经典的组合规则和本文方法对数据进行融合,检验在实际应用中的性能,融合结果如表2所示。
随着证据对故障诊断类型A支持度的变化,基本D-S组合规则的弊端是明显的,它的组合结果不随证据对诊断类型A支持度的变化而改变,没有充分考虑其它证据对故障诊断类型A支持度的变化。文献[10]的方法将证据间的非包容性信息全部赋值给未知空间,不论后来证据对目标A支持度如何变化,未知项始终在增加。相比较而言,文献[11]的方法有较大的突破,对证据间的冲突信息进行了分配,但缺陷也很明显,未知项没有明显的降低,给系统的决策带来了较大的困难,并且对目标A的支持度没有随着证据对目标A支持度的增加而较快地增加。而本文方法考虑各传感器的可靠性与稳定性,从2个方面对证据进行修正,从组合结果可以看出:本文方法考虑了各传感器的稳定性,是一种较为保守的组合方法,更多地考虑了证据2给出的诊断结果,也就是尊重了“少数人的意见”,对每一种证据都给与相应的权重,使得诊断结果更加周全而真实。

表2 几种证据组合规则综合性能应用对比
4 结论
由于数控机床在运转中的各种因素,传感器测得的数据结果各有侧重,信息融合系统中收集到的证据存在着较大的冲突,导致使用Dempster组合规则得不到正确的故障诊断结果。本文中给出了一种基于证据相容度的证据组合方法。根据证据相容性函数获得证据间相容度矩阵,归一化后得到证据的一致相容性度量,然后定义了证据相容系数的偏离度,通过联合证据的一致相容性与证据的稳定性获得一种证据的权系数,最后采用Dempster组合规则完成对证据的加权平均组合。实验结果表明:本文方法提高了融合结果的合理性,解决了Dempster方法在处理高冲突证据时所存在的问题,在数控机床故障诊断中得到了有效的应用。
[1]方凯,罗敏,陈志楚.汽车零部件制造数控装备可靠性评估与故障分析[J].湖北汽车工业学院学报,2014,28 (1):51-53.
[2]刘希亮,陈桂明,李方溪,等.基于多传感器信息融合的故障诊断方法研究及应用[J].机械强度,2013,36 (6):743-748.
[3]Dempster A P.Upper and Lower Probabilities Induced by a Multi-valued Mapping[J].Ann Mathematical Statis⁃tics,1967,38:325-339.
[4]Shafer G.A Mathematical Theory of Evidence.Princeton [M].New Jersey:Princeton University Press,1976.
[5]张山鹰,潘泉,张洪才.一种新的证据推理组合规则[J].控制与决策,2000,15(5):540-544.
[6]曹建福,曹雯,张家良,等.基于非线性特征融合的高速装备故障诊断方法[J].计算机集成制造系统,2012,18(11):2502-2508.
[7]蔚晓丹.基于改进D-S信息融合方法的发动机故障诊断[J].公路交通科技,2012,29(9):146-151.
[8]牛强军,黄家成,胡秀洁,等.基于改进D-S决策融合的航点设备故障诊断[J].计算机工程与设计,2015,36 (8):2255-2259.
[9]仝磊,陈越,王直,等.基于D-S证据理论的柴油机故障诊断[J].科学技术与工程,2010(15):3749-3752.
[10]Yager R.On the Dempster-Shafer Framework and New Combination Rules[J].Information Sciences,1987,41 (2):93-137.
[11]孙全,叶秀清,顾伟康.一种新的基于证据理论的合成公式[J].电子学报,2000,28(8):117-119.
[12]Smets P.Decision Making in the TBM the Necessity of Pignistic Transformation[J].International Journal of Ap⁃proximation Reasoning,2004,38:133-147.
[13]范兆军,郑海起,戚洪海.基于信息融合技术的机械系统故障诊断框架研究[J].科学技术与工程,2006,6(23):4709-4713.
[14]曹洁,郭雷雷.一种基于局部冲突分配的证据组合规则[J].计算机应用研究,2013,30(7):2033-2035.
CNC Fault Diagnosis Based on Evidence Theory Method
Fang Kai1,2,Liu Lingyun1,Luo Min1,Chen Zhichu1,3
(1.School of Electrical&Information Engineering,Hubei University of Automotive Technology,Shiyan 442002,China;2.School of Electronics and Information Engineering,Xi'an Jiaotong University,Xi'an 710049,China;3.College of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,China)
For the counter-intuitive results problem when using evidence theory in the fault diagnosis of CNC,an evidence combination method was presented based on evidence of consistency degrees.The ev⁃idence consistency degrees matrix was obtained from evidence compatibility function,was normalized to give evidence consistent compatibility measure,and the deviation degree of evidence compatibility coefficient was defined in order to characterize the stability of evidence,then the weights of evidence was obtained combining with consistent compatibility and stability of evidence,finally,the weighted av⁃erage combination of evidence was completed using the D-S combination rule.This method was applied to the fault diagnosis of a certain type of domestic CNC,the experimental results and analysis show the method is reasonable and effective.
evidence theory;compatibility matrix;evidence conflict;CNC;fault diagnosis
TH17
A
1008-5483(2016)02-0031-05
10.3969/j.issn.1008-5483.2016.02.008
2016-02-28
湖北省教育厅科学技术研究项目(B2015124)
方凯(1981-),男,湖北武汉人,博士生,从事汽车生产自动化、多源信息融合理论与应用等方面的研究。E-mail:fangkai027@sina.com