深海采矿转臂机构采矿姿态优化研究
2016-10-12周知进罗柏文
周知进,杨 智,罗柏文
(1.贵州理工学院 机械工程学院,贵州 贵阳 550003;2.湘电集团有限公司,湖南 湘潭 411101;3.湖南科技大学 机电工程学院,湖南 湘潭 411201)
深海采矿转臂机构采矿姿态优化研究
周知进1,3,杨 智2,罗柏文3
(1.贵州理工学院 机械工程学院,贵州 贵阳 550003;2.湘电集团有限公司,湖南 湘潭 411101;3.湖南科技大学 机电工程学院,湖南 湘潭 411201)
针对海底地形不平坦特性,提出了一种变幅机构来自适应海底地形采矿姿态的采矿机构。综合考虑采矿机构采掘头距海底高度对采矿率影响,利用关键点法建立了节臂上的点到海底地形距离的数学模型。在此基础上,建立了以采矿率最高为目标的最优采矿姿态数学模型。以某实际地形为例,采用模拟退火遗传算法优化求解最优采矿姿态。根据其优化后结果可知,其最优采矿姿态与海底地形坡度变化一致,从而证明了采矿姿态模型的正确性。
深海采矿;采矿姿态;遗传模拟退火算法;转臂机构;采矿率
Abstract:Because the ocean floor terrain is not flat,the seabed topography mining posture must be regulated by changing its amplitude mechanism.According to the impact of height on the mining rate of seabed mining head,a mathematical model was established by using a key-point method for the seabed terrain away from deep-sea.Based on the model's distance information and considering the impact of the acquisition ratio with mining head height,an optimal mining stance mathematical model was established.Taking a real terrain as an example,the simulated annealing genetic algorithm was used to solve the optimal mining stance.According to its results after optimization,the optimal mining stance changed with the slope of the seabed topography.Thus the results proved the reasonableness of the model.
Keywords:deep-sea mining; mining posture; SAGA; mining turning arm; mining rate
大洋底蕴藏着极其丰富的矿藏资源,锰结核广泛地分布于世界海洋2 000~6 000 m水深海底的表层,而以生成于4 000~6 000 m水深海底的品质最佳。锰结核总储量估计在30 000亿吨以上。其中以北太平洋分布面积最广,储量占一半以上,约为17 000亿吨[1]。它大多产于海底表层,赋存在水深3 000~5 000 m的深海平原、海沟、海台等区域。对于在深海平原锰结核采集较容易,但是赋存在海沟与海台处的锰结核,需要研制的采集机构与行走装置比较复杂[2]。目前没有一种能应用于商业化采矿装备,主要原因是现有采集机构自适应海底地形能力、越障性能较差以及采集效率低[3]。所以提出了一种新型的转臂-支腿式采集锰结核机构,试图解决现有深海集矿机存在的缺陷和不足。由于采矿姿态直接关系到集矿机的采集效率,这种新型采矿机构能根据海底地形调整采矿姿态[4],对于深海采矿机构自适应海底地形和提高采集效率具有重要的工程实际意义。
1 转臂-支腿式采矿方式
转臂-支腿式采集方式是采掘头与采矿平台相接,通过丝杆驱动采矿头沿采矿平台径向来回运动,而悬挂在采矿转臂上采矿平台绕支腿旋转,扫过一定面积,从而通过采矿头收集锰结核矿石。每一个采矿平台安装有一个采掘头,其采矿机构原理示意如图1所示,主要由采矿车、采矿平台、支柱、采矿转臂、浮力材料、滚轮等组成。
采矿转臂4由3段节臂、3个变幅机构所构成。通过液压油缸伸缩来控制变幅,从而控制节臂与节臂之间的角度,并使节臂间的角度随海底地形变化,从而控制采掘头离地的高度。转臂-支腿式采矿与现有的采矿方式相比,不但可以使采矿机构遇到深的海沟时,不致使采掘头跌落海沟,同时采矿机构转臂动力是来自支腿与滚轮支撑,从而保证了采矿系统采矿时对海底的扰动最小[5],采掘头离地高度能够自动调节,提高了采集效率[6]。从而成功解决了深海采矿集矿机构遇到的技术难题。

图1 转臂-支腿采矿机构示意Fig.1 A sketch of mining mechanism with turning arm-leg
2 采矿转臂与海底间距离建模
2.1采矿转臂空间位置函数
多关节转臂由3段节杆组成,节杆之间由变幅机构连接,调节油缸的长度,从而来确定其开采位姿。把半径方向作为x轴,高度方向作为y轴,去除升幅机构,则多关节转臂空间位姿函数如图2所示。根据中国大洋协会航次获取数据,初步确定一次性开采范围40 m2左右,令3根节臂长度相等,且均为L1=L2=L3=5 m,A点到海底的高度为2 m,节杆之间的夹角分别为θ1、θ2、θ3,则可求出A,B,C,D四点坐标,即A(0,1)、B(5cosθ1,5cosθ1+1)、C(xC,yC) 、D(xD,yD) 。
其中,C点坐标:
D点坐标:
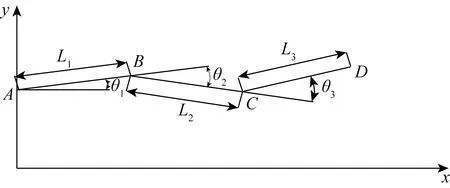
图2 转臂空间位置函数示意Fig.2 A sketch of a function for the spatial position of the arm
根据A,B,C,D的坐标,且可以求出杆件在此坐标系上的三段直线方程y=f(x)。AB段的方程为:
把A,B点坐标代入等式(3)中,从而可以推导出

同理可以推导BC段的方程为:
其中,x∈(5cosθ1,5(cosθ1+cos(θ1+θ2)))。
CD段的方程为:
其中,x∈[5(cosθ1+cos(θ1+θ2)),(cosθ1+cos(θ1+θ2)+cos(θ1+θ2+θ3))]。
2.2海底地形函数模型建立
由转臂-支腿式采矿方式的原理,可以知道转臂绕支腿旋转一周采集的区域半径为15 m的圆形区域。把圆形区域等分成N等分,每一等分为中心角为360°/N的扇形区域。使用超声波扫描在此扇形区域中选择4个点O,E,F,G如图3所示。其中O点为原点,G点为扇形中心角的角平分线与圆的交点,E,F为扇形区域中最高点与最低点2点(以半径小的为E点,另一点为F点)。把半径作为x值,高度方向作为y值,则4个点的坐标可以得到分别为O(0,0),E(xE,yE) ,F(xF,yF) ,G(15,yG) 。根据4个点的坐标,可以建立扇形区域的地形函数 ,如图4所示。

图3 海底地形函数关键点选择示意Fig.3 Seabed topography diagram of the function key selection
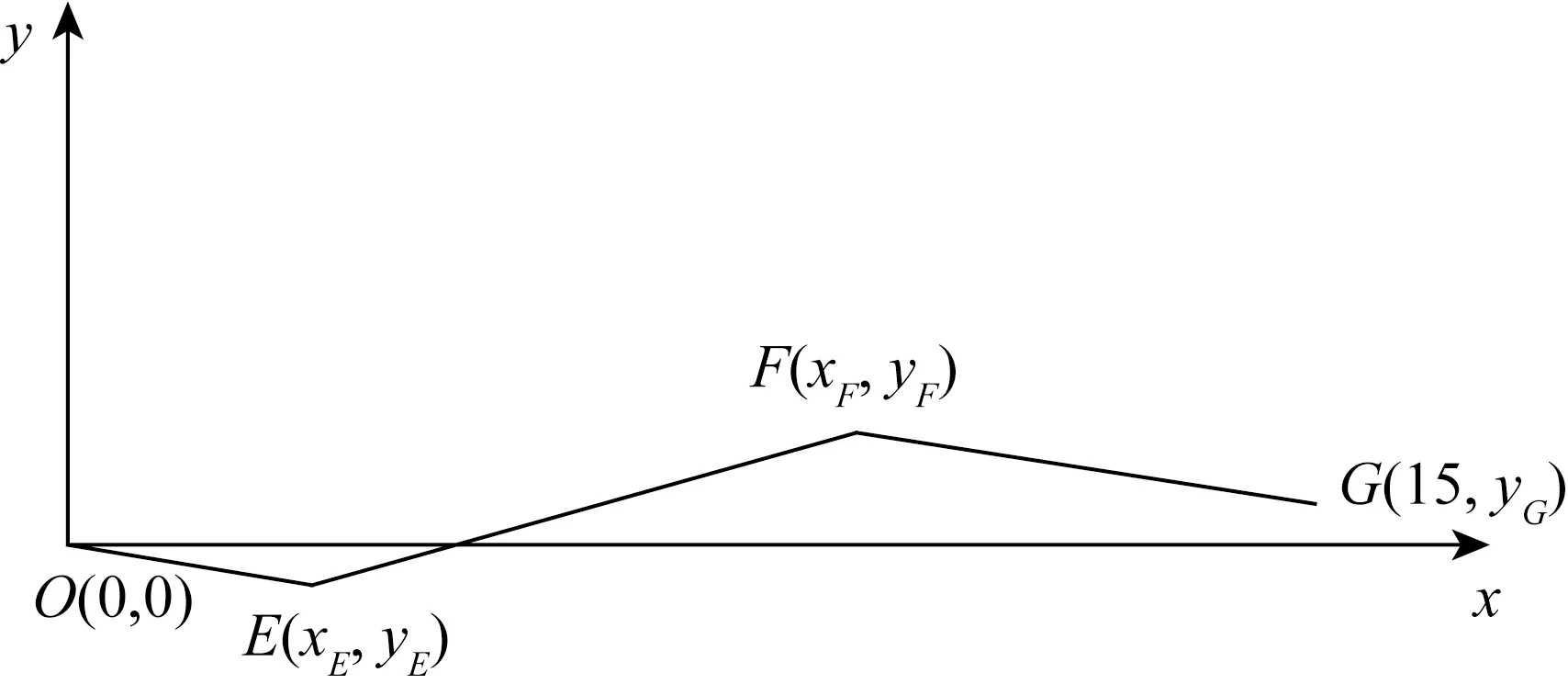
图4 地形函数示意Fig.4 A function sketch of ocean floor
EF段方程为:

FG段方程为:
2.3节臂到海底垂直方向距离的计算
由以上分析,可以得到多关节转臂空间位置函数y=f(x)与地形函数y=f1(x),则节杆到海底垂直方向的距离为H(x)=f(x)-f1(x)。由于节杆函数与地形函数都是分段直线函数,所以根据海底地形函数与节臂函数的关系,把节臂到海底函数H(x)分为6种状况如图5所示。
当xE,xF∈(0,5cosθ1),如图5(a)所示,节臂到海底函数H(x)表示式如下:
当xE,xF在其他区间时候,这时节杆到海底垂直方向的距离为H(x),同样根据地形函数与节臂的空间位置函数求解出来。

图5 节臂到海底距离的6种状况Fig.5 distance arm to the bottom of six conditions
3 建立转臂最优采矿姿态数学模型
3.1选取设计变量
经过以上分析可以知道,多关节转臂的节臂长度是固定的,而节臂之间的夹角θ1,θ2,θ3是随着油缸长度的变化而变化。所以多关节转臂最优采矿姿态数学模型的设计变量为X=[X1,X2,X3]T=[θ1,θ2,θ3]T。则不同的[θ1,θ2,θ3]T就会产生不同的转臂空间位置函数y=f(x)。由于扇形区域中O,E,F,G点的坐标是探测到的,则扇形区域地形函数y=f1(x)也就确定了。不同的[θ1,θ2,θ3]T会产生不同的节臂到海底垂直方向的距离为h(x)=f(x)-f1(x)。
3.2目标函数的建立
根据相关学者的分析,深海采矿时采矿头喷射压力与喷嘴内径一定的情况下,其采矿头距海底的高度影响其采矿率 ,当采用某研究所使用的水力采矿头时其关系如图6所示。当高度为0.1 m时,其采矿率最高[8-9]。所以认为采集锰结核时,采矿头距离海底高度为0.1 m范围内波动时候,其采集率最高。
采矿平台与转臂之间使用弹簧相连接,其弹簧刚度选择的标准是如果图7所示,使采矿头在自重的情况下采矿头距离海底的距离h=0.1 m。所以如果海底地形函数的水平线,则就可以控制转臂升幅机构,调整节杆件之间转角使节杆到海底的竖直方向的距离等于支柱OA的高度LOA,这样既能采集海底的锰结核效率最高。但是实际海底地形的地形函数不是y=0,所以不能保证节杆上每个点到海底的竖直方向的距离H(x)都等于LOA。但是可以以节杆上每个点到海底的竖直方向的距离H(x)与支柱高度LOA的偏差最小作为优化目标,此时在保证采集多金属结核的效率最高,所以此时为多关节转臂的最优采矿姿态。因此适应此扇形区域采矿最优姿态数学模型的目标函函数为:
由于节杆上到海底的竖直方向的距离函数H(x),根据地形的不同分为6类,所以在求解目标函数时,也必须根据地形的不同分段求解积分。

图6 采矿头高度与采矿率的关系Fig.6 The relationship to the ratio of mining efficiency and mining height
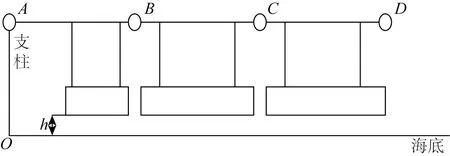
图7 海底地形平坦时最优采矿姿态Fig.7 The mining optimal posture for flat ground
3.3约束条件的建立
如果转臂上的点竖直方向到海底的距离太小,采矿头会与海底地形形成干涉严重,以设置H(x)≥0.8LOA来避免此情况发生。为增加转臂采矿时的刚度,可以使浮力滚轮与海底接触,则转臂末端D点处到海底竖直方向的距离H(xD)应满足LOA≥H(xD)≥0.9LOA。建立的约束条件如下:
4 基于SAGA优化采矿转臂采矿姿态
采矿姿态的计算准确与否直接关系到集矿机构的集矿率与才矿时对海底扰动的大小。为了精确求解其采矿姿态,而且由于海底地形函数数据库很大,所以对应的计算量很大,为了快速求解出最优采矿姿态,采用遗传模拟退火算法优化采矿姿态。
4.1遗传模拟退火算法
将遗传算法的相关算子加入模拟退火算法中,这样就避免了退火算法的随机迭代,而这两种智能算法的结合,互相弥补之间的缺陷,因此能快速达到理想的全局最优解[10-11]。基于模拟遗传退火算法(SAGA)的采矿姿态优化,其过程如图8所示。
SAGA本优化算法是以模拟退火作为程序的主框架,在每次退火过程之前加入了遗传算法的操作代替传统模拟退火算法中的随机搜索,从而减少了搜索的时间。同时在每次遗传算法中每进化一代后加入Metropolis准则这一退火算法的思想,避免了遗传算法早熟现象。
4.2实例优化
在对采矿姿态的优化,即设计变量满足约束条件的情况下,使其目标函数最小。简化的海底地形函数的不同,则最优采矿姿态也将不同,采矿姿态由节臂间的转角(θ1,θ2,θ3)T所决定。在优化时,必须先探测海底地形,建立海底地形函数库,根据此数据库可以优化出于此对于的最优采矿姿态库,即节臂间的转角(θ1,θ2,θ3)T的数据库。
某扇形区域的地形函数由其该区域的关节点E(xE,yE),F(xF,yF),G(15,yG)所决定,所以地形函数数据库其实就是关键点的数据库。令某区域的的关键点为E(4,0.3),F(12.5,0.4),G(15,0.35),利用SAGA对采矿姿态进行优化。选取种群大小为80,最大遗传代数为20,变异概率为0.06,交叉概率为0.8,代沟系数为0.7,初始温度为100,终止温度为0.09,降温系数为0.8,则优化后的采矿姿态示意如图9所示,节臂的转角弧度为(0.061 5,-0.044 9,-0.024 5)T,目标函数值为0.248 1,其优化进程如图10所示。
由最优姿态示意图可知,当采矿姿态最优时,其节臂位置函数每段函数的斜率与海底地形函数一致,节臂位置函数上每点到海底地形函数的距离保持在2 m左右,这样就能保持在采矿时采矿率最高。有采矿姿态进程图可知,采用SAGA优化此模型收敛性能良好。

图8 基于遗传模拟退火算法的连杆优化流程图Fig.8 Genetic simulated annealing algorithm to optimize the flow chart of the link-based
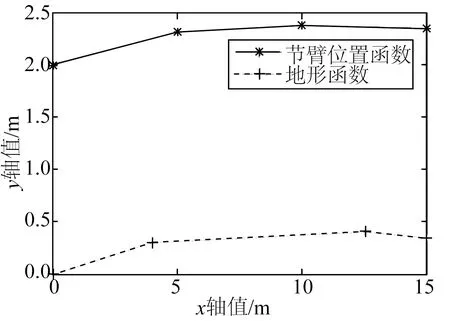
图9 最优姿态示意Fig.9 Optimal attitude

图10 采矿姿态优化进程图Fig.10 The mining posture optimization process
5 结 语
利用关键点法建立了节臂上的点到海底地形距离数学模型,并根据此距离模型信息,结合海底采矿时采矿头高度对采集率的影响,建立了以采矿率最高为目标的最优采矿姿态数学模型。以某实际地形为例,采用模拟退火遗传算法优化求解最优采矿姿态。根据其优化后结果可知,其最优采矿姿态与海底地形斜率变化一致,从而证明了姿态的合理性。
[1] 夏毅敏.螺旋采集头工作参数优化研究[D].长沙:中南大学,2006.(XIA Yimin.The operating parameters' optimization on spiral mining head[D].Changsha:Central South University,2006.(in Chinese))[2] NIELSEN S H H,MCKENZIE C,MILLER A.Chatham rise nodular phosphate-modelling the prospectivity of a lag deposit (off-shore New Zealand):A critical tool for use in resource development and deep sea mining[J].Ore Geology Reviews,2015,71:545-557.
[3] 何志强.适应深海富钴结壳微地形的采矿头研究[D].长沙:中南大学,2004.(HE Zhiqiang.Study on mining head for adapting the deep Microtopography[D],Changsha:Central South University,2004.(in Chinese))
[4] CHUNG J S.Deep-sea mining:Technologies for manganese nodules and crusts[J].Internal of Offshore and Polar Engineering,1996,6(4):244-255.
[5] NATH B N,SHARMA R.Environment and deep-sea mining:A perspective[J].Marine Georesources and Geotechnology,2000,18(3):285-294.
[6] HUANG Zhonghua,LIU Shaojun,XIE Ya.Obstacle performance of cobalt-riching crust wheeled mining vehicle[J].Journal of Central South University Technology ,2006,13(2):180-183.
[7] KAUL G.Deep sea mining of submarine hydrothermal deposits and its possible environmental impact in manus basin,papua new guinea[J].Procedia Earth and Planetary Science,2013(6):226-233.
[8] 刘少军,刘畅,戴瑜.深海采矿装备研发的现状与进展[J].机械工程学报,2014,50(2):8-18.(LIU Shaojun,LIU Chang,DAI Yu.Status and progress on researches and developments of deep ocean mining equipments[J].Journal of Mechanical Engineering,2014,50(2):8-18.(in Chinese))
[9] OEBIUS H U,BECKER H J,ROLINSKI S,et al.Long- term propagation of tailings from deep-sea mining under variable conditions by means of numerical simulations[J].Deep Sea Research Part II:Topical Studies in Oceanography,2001,48(17-18):3453-3467.
[10] 周知进,杨智,阳宁,等.基于遗传模拟退火算法的深海采矿转臂连杆机构优化设计[J].机械设计与研究,2014,30(2):22-25.(ZHOU Zhijin,YANG Zhi,YANG Ning,et al.Study on optimization of deep-sea mining boom linkage based on SAGA[J].Machine Design and Research,2014,30(2):22-25.(in Chinese))
[11] HOAGLAND P,BEAULIEU S,TIVEY M A,et al.Deep-sea mining of seafloor massive sulfides[J].Marine Policy,2010,34(3):728-733.
Study on mining posture optimization for deep-sea mining arm
ZHOU Zhijin1,3,YANG Zhi2,LUO Bowen3
(1.School of Mechanical Engineering,Guizhou Institute of Technology,Guiyang 550003,China; 2.Xiangtan Electric Manufacturing Group Limited,Xiangtan 411101,China; 3.Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment,Hunan University of Science and Technology,Xiangtan 411201,China)
TD424
A
10.16483/j.issn.1005-9865.2016.01.012
1005-9865(2016)01-0088-06
2015-03-17
国家自然科学基金资助项目(51174087)
周知进(1969-),男,湖南新化人,教授,博士,主要从事深海矿产资源装备设计与研。E-mail:zjzhou@hnust.edu.cn