浅析微机械石英陀螺的设计
2016-09-27余德林
余德林
(湖北交通职业技术学院,湖北 武汉,430079)
浅析微机械石英陀螺的设计
余德林
(湖北交通职业技术学院,湖北 武汉,430079)
本文根据振动陀螺的工作原理,利用公理化设计理论进行了分析,建立振动陀螺设计模型,使用该模型石英振动陀螺仪传感元件—石英音叉片进行分析。利用有限元法是应用于音叉电子晶片灵敏度数据分析,评估其优缺点,设计石英音叉片解耦,为其他的设计提供有利的参考。
公理设计;灵敏度;振动陀螺;石英陀螺
音叉的工作原理是在音叉保持持续恒定等幅振动的作用下,一旦音叉进行旋转转动运动,就会受到柯里奥里力也就是惯性力的阻碍,不让音叉转动,从而触发了音叉在一个平面上的振动,在振动的同时,音叉的转动角速度是跟振幅成正比例系数的,同样也会产生一个电信号,进而得出转动时的角速度。QRS有很多优点,比如说:制作的本钱低、稳定性好等等。此外,它的使用寿命很长,角速度测量范围宽、响应时间短、耐抗冲击性强,属于低精度陀螺仪。QRS波,音叉是陀螺振动仪核心组件,其结构和性能直接影响石英陀螺仪的质量。
1 机械陀螺的发展历程
对于微型的机械陀螺认知是从1980年左右开始的。在1988年的时候,全球最先发现硅基微机械陀螺的机构是位于美国的Draper实验室。随着时代的发展和进步,1990年之后,LIGA技术和体硅工艺技术的发展壮大和技术成熟,更多的资源用来制作大质量块。在1988年发现硅基微机械陀螺之后,美国的Draper实验室于1993年又成功地将微机械陀螺在 60Hz带宽的前提下使分辨率高达1.5°/s,这一微机械陀螺是由硅-玻璃键合工艺和单晶硅体硅艺二者结合制成的。随着时间的推移,分辨率越来越高。1994年,同样是美国的大学在 10Hz带宽的前提下将分辨率提高到 0.5°/s。并在1995年时,陀螺与电路的单片集成技术成功研制出来,这样技术的成功得益于表面微机械工艺技术的发展和成熟。之后,各个大学主攻陀螺的等效噪音角速度,并逐渐的提升等效噪音角速度的性能。在现代社会上这项技术已经在商业上得到了广泛的应用。
2 科氏力原理
地球自转的同时会产生一种力,科学家们称为科里奥利力(简称科氏力,是一种非惯性参照系的惯性力)。相比于推拉力来说,科氏力其实不是“真实的”力,但是不可否认它的力量是非常强大的,强大到可以造就台风的地步。在不断旋转的地球上,流体运动始终受到科氏力的作用,气象学上又称之为地转偏向力。对于大尺度大气运动,科氏力具有十分重要的意义。科氏效应用图片理解就是如图 1所示 ,假如在旋转的平面上,木块相对于地面的速度为V=ωr。
3 基于设计公理的整栋陀螺的设计
在独立公理和柯氏效应双重作用下,柯氏振动陀螺的功能非常多,比如:
1)FRs1这种驱动是提供被称为迫运动或运动驱动器的模式。在一般情况下,驱动器的运动优选是恒定幅度 - 频率谐波振荡。只有这样,才能使CoriolisFc的角速度,并进入线性Ω。Coriolis振动陀螺仪必须有一个结构DPS1,为了产生这样的驱动器。目前,该驱动器具有压电,静电和电磁这些类型。

图1

图2
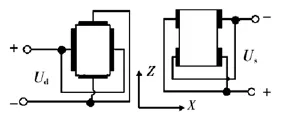
图3

图4
2)在FRS2被感测的情况下,感测时所产生的向心力的振动充分利用。当前来说,科氏力而形成的电信号变化输出是由压阻、压电和电容式振动引起的。对于这个电信号的大小的线性关系来说,是由输入的近似大小的角速度来决定的。这一功能结构DPS2完成检测。
3)FRs3是否在一定的比例产生的驱动结构DPS1,Coriolis被传递到感测结构DPS2。 DPS3实现这一功能是设计科里奥利振动陀螺仪设计的关键。精心设计,可产生尽可能的DPS1,Coriolis被传递到DPS2,同时也能更好驱动运动和运动感测不需要的耦合隔开。 因此,柯氏振动陀螺的解耦设计矩阵如图2。
4 微机械石英陀螺的分析
对于微型机械石英陀螺来说,它可以大体分为两种,第一种是X轴上的基准振动,Y轴角速度输入,在Z轴感测的振动。例如,一个单端音叉型,夹在双端音叉型之间,三叉指4叉指,上下三叉手指类型。第二种是在X轴,Z轴角速度输入,感测的振动或在X轴的基准振动。 如平面型石英陀螺。
微机械振动陀螺结构的第一次讨论。驱动电极和如图感测所述第一类微机械振动陀螺的电极,见图3。与此电极结构可以在所引起的复合向心力的X方向叉指式振动检测和Z方向上的振动被驱动。

表1 石英陀螺的电压灵敏度
对于音叉石英陀螺来说,它的结构不是太复杂如图4所示。在任何一个驱动器中,它必须有感测能力和交指的功能。
由于振动式微机械陀螺由科氏加速度产生的输出信号是极其微弱的电容信号,而且又随驱动信号频率简谐变化,所以在检测方案中必须综合考虑,应选择适当的测量方法,以消除微小电容测量中存在的问题,如噪声、寄生电容的影响,又要充分利用微机械陀螺仪差动输出的电容信号的特点。微机械振动式陀螺是采用间接的方法测量输入角速度,即通过测量由与输入角速率成正比的科氏加速度引起的差动敏感电容器的电容量变化,来测量输入角速度。
5 敏度分析
灵敏度可符合输入的衍生物,最好的函数的输出数据来表示。石英陀螺仪,角速度输入单元在一定的时间时,石英陀螺仪的灵敏度的大小是输出电压检测电极。在最开始的时候,我们可以利用其他方法来预测石英的灵敏度。并使用该指标来比较DPS3通过Coriolis感测电极,以效率不同的结构。为了获得精确的比较结果的结构图,在掩模的感测电极几何这三种驱动叉骨结构和叉臂被设置为相同。
COMSOL Multiphysics是一种常规的物理现象和日常工具的数值模拟的数学模型。他的创建模式非常传统,步骤非常的简洁。1)合理确定他的几何模型;2)更加准确的定义物理参数;3)将所述有限元网格;4)解决问题; 5)参数分析,拓扑优化 ;6)可视化的处理器。同时,我们还必须注意一些问题:就是Coriolis的前被计算为新的边界条件,执行谐波分析。
在同样单位的加速度、电压、相同的条件下不同结构的三种石英陀螺的灵敏度如表1所示。
6 结 论
随着时代的发展和进步,技术的不断发展,特别是不断提高的表现,而不是微机械加工技术的应用,振动技术的日益重要的领域陀螺惯性位置。它的设计在很大程度上取决于设计经验的设计师。建立给人们以科学的设计理论把握产品设计的科里奥利振动陀螺仪公理化设计矩阵。同时,利用有限元分析的敏感性,将能够作出预测石英陀螺仪的性能和测试在设计阶段,它提供了用于随后的其他工作的选择,电路设计有用的参考。
(References)
[1] 丁俊武,韩玉启,郑称德. 现代产品设计理论研究综述[J]. 机械制造. 2015(12):56-58
[2] 刘宗林,李圣怡,吴学忠. 解耦型静电力闭环微陀螺[J]. 传感技术学报,2015(2):105-107.
[3] 林日乐,张巧云,谢佳维,等. 微电子技术在石英微机械振动陀螺中的应用[J]. 中国惯性技术学报, 2014(4):25-27.
[4] Konno.Masashi.Andular velocity sensoe. USA. Patent 6237415.2001-05-29.
