一体化小型无人机航电系统设计与实现
2016-09-23吴一波梁少军申斌
吴一波,梁少军,申斌
(武汉军械士官学校无人机系, 湖北 武汉 430075)
一体化小型无人机航电系统设计与实现
吴一波,梁少军,申斌
(武汉军械士官学校无人机系, 湖北 武汉 430075)
对飞行控制系统、供电系统、导航定位系统、无线电发射系统进行一体化设计,提出并实现一种成本低、结构稳定、抗干扰性强的小型无人机航电系统一体化设计方案.采用即时融合和长效融合算法对加速度传感器和角速度传感器测量数据进行融合处理,采用卡尔曼滤波和罗差修正校正磁航向传感器数据,实现飞行姿态的精确测量;飞行控制系统实现姿态自稳控制模式、定高控制模式、定向控制模式,各种模式可叠加;采用宽电压适应范围的直流稳压模块,并有效滤除波纹电压.统一电路板开孔位置和尺寸,确保一致性.
小型无人机;航电系统;一体化;设计实现
0 引言
无人机技术已逐步向实用发展,各种无人机航电系统发展日趋成熟,功能日趋完善.目前,无人机均采用分系统设计,各个子系统的分离设计安装使无人机航电系统整体可靠性下降.各个子系统的信号连接部件是系统故障的高发区域,子系统间的干扰隔离是无人机航电系统设计的关键[1-3].无人机航电系统的一体化设计可有效降低各子系统通信失误,在整体上控制相互干扰,提高无人机航电系统的可靠性[4].为了使小型无人机航电系统各个子系统能有效地协同工作、互不干扰,本文中提出并实现一种成本低、结构稳定、抗干扰性强的小型无人机航电系统一体化设计方案.
1 无人机航电系统一体化设计需求
无人机航电系统中包含飞行控制系统、供电系统、导航定位系统、无线电发射系统,需进行一体化设计.
1.1飞行控制系统设计需求目前无人机航电系统中飞行控制系统的一体化设计较为成功,芯片级航空传感器的发展使飞行控制系统的小型化一体化设计成为可能[5-6].一体化飞行控制系统在一块集成电路板上集成了加速度传感器、角速度传感器、磁航向传感器、气压高度传感器、压差传感器等测量元件和小型单片机系统,整个电路板统一供电,预留串行通信接口与GPS模块、数传电台等外围模块相连.这样的设计简单灵活,但在实际使用过程中,有的小型无人机采用弹射起飞,起飞过程中过载冲击较大,各个模块连接件容易发生松动,造成航电系统故障[7].
飞行控制板实时测量飞行姿态、高度、空速等信息,完成姿态自稳控制、定高控制和定向控制.飞行控制系统通过加速度传感器和角速度传感器融合测量无人机飞行姿态,即飞行的俯仰角和倾斜角.加速度传感器和角速度传感器均可独立测量飞行姿态,加速度传感器没有累计误差,可以长时间测量精度,但在瞬时冲击的影响下,测量容易受到影响;角速度传感器动态测量效果好,但是在积分测量姿态角的过程中具有累计误差[8].
磁航向传感器易受到电磁环境干扰,飞机上的铁磁材料对地磁场的影响,会使磁航向传感器所在位置的磁场发生变化.这些因素导致在磁航向传感器工作过程中,航向测量易发生跳动,影响无人机飞行的稳定[9].
1.2数传电台设计需求数传电台板接受地面控制站的遥控指令通过串行接口发送给飞行控制板,并且接受飞行控制板的遥测数据发送给地面控制站.目前常用的小型化数传电台工作峰值电流较大,瞬时的冲击电流给整个电路造成较大的纹波干扰,芯片级航空传感器对电源纹波较为敏感,尤其是磁航向传感器,在纹波电压的影响下,测量精度直线下降[10].分离模块的航电系统设计在各个模块电气连接部分大量使用滤波磁环,虽然滤波效果明显,但是在小型无人机飞行过程中,滤波磁环位置容易发生变动,机舱内磁环境相应发生变化,使磁航向传感器测量造成较大误差.
1.3电源供应及GPS定位板设计需求电源供应及GPS定位板从机载锂电池接受电源供应并完成降压稳压,供飞行控制板和数传电台板使用,并且板上GPS模块实时测量无人机飞行位置,通过串行接口发送给飞行控制板.此模块应保证整个系统电压的稳定,有效滤除纹波电压,并且保证磁航向传感器周边磁环境的相对稳定,保证传感器等测量元件的稳定工作.
2 无人机航电系统结构


图1 一体化无人机航电系统构
3 技术方案
3.1传感器数据的精确测量本研究中采用即时融合和长效融合2种融合算法,将加速度传感器和角速度传感器的测量数据进行融合处理,实现飞行姿态角的精确测量.即时融合中,对加速度传感器测量数据进行平均滤波,消除瞬时冲击的不良影响.实时计算加速度传感器和角速度传感器在前后2个控制周期(本研究中设置为3 ms)内测量姿态角的变化值,当加速度传感器和角速度传感器测量得到的姿态角的变化值差异在设置的阈值内,使用加速度传感器测量得到的姿态角修正角速度传感器测量得到的姿态角,修正中将误差进行衰减.长效融合中,在即时融合的基础上,记录多个控制周期中(本研究中设置为200个),加速度传感器与角速度传感器测量姿态角的误差值,利用平均值修正角速度测量零位.
磁航向传感器易受电磁环境干扰,在工作过程中,航向测量易发生跳动,在定向控制模式中,这种跳动会影响无人机姿态稳定.本研究中使用卡尔曼滤波对航向测量数据进行平滑滤波,在多个测量周期中(本研究中设置为10个),将每个测量值与平均值的偏差作为测量值的置信权重,偏差较大的测量值对输出航向的作用相对较小.
飞机上的铁磁材料对地磁场的影响,会使磁航向传感器所在位置的磁场发生变化.本研究中设计了罗差修正程序:1) 由地面站向一体化小型无人机航电系统发送XY轴向地磁补偿开始命令;2) 使飞机处于水平,转动飞机做偏航运动一周,记录磁航向传感器在X轴向和Y轴向上的最大和最小测量值(Xmax、Xmin、Ymax、Ymin),然后计算X轴向和Y轴向的误差偏移量εX=Xmax-(Xmax-Xmin)/2,εY=Ymax-(Ymax-Ymin)/2;3) 由地面站向一体化小型无人机航电系统发送XY轴向地磁补偿结束命令;4) 由地面站向一体化小型无人机航电系统发送XZ轴向地磁补偿开始命令;5) 使飞机处于水平,且使机头朝向正东或者正西,转动飞机做滚转运动一周,记录磁航向传感器在Z轴向上的最大和最小测量值(Zmax、Zmin),然后计算Z轴向的误差偏移量εZ=Zmax-(Zmax-Zmin)/2;6) 由地面站向一体化小型无人机航电系统发送XZ轴向地磁补偿结束命令;7) 由地面站向一体化小型无人机航电系统发送误差偏移写入命令,将3个轴向上的误差偏移写入飞行控制板上的EEPROM.
飞行控制板上使用的EEPROM芯片为CAT1025,并且将CAT1025作为飞行控制板的看门狗芯片,将STM32F103的I2C总线时钟信号连接到CAT1025,当I2C总线时钟信号长时间停止时,系统重启.

图2 飞行控制系统控制回路流程
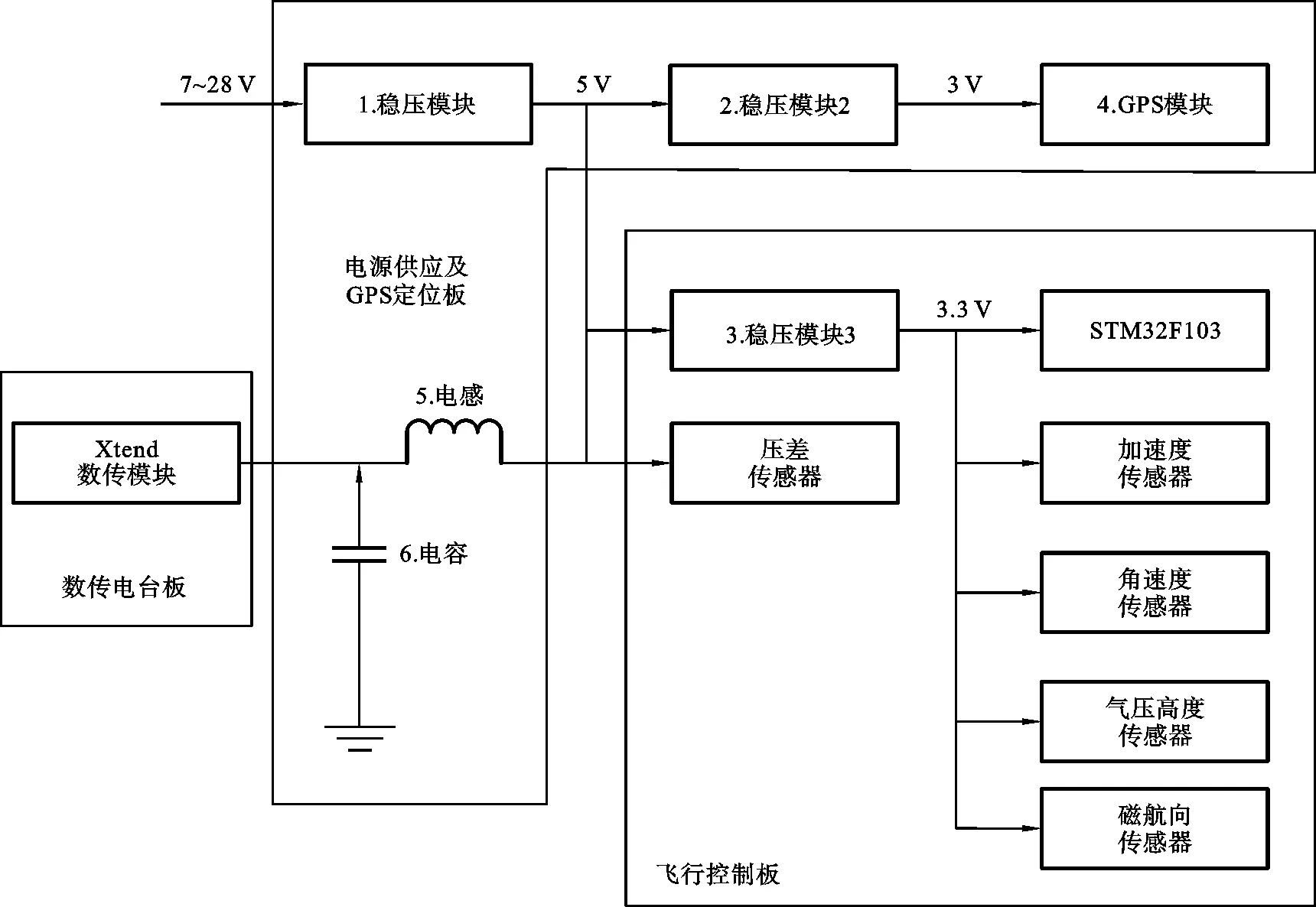
图3 一体化无人机航电系统供电结构示意
4 讨论
4.1系统特征本研究中设计的一体化小型无人机航电系统,其特征为:1) 飞行控制系统、电源供应及GPS定位系统和数传通讯系统的一体化设计,各电路板开孔位置及尺寸都与XTend数传模块相同,多块电路板采用六角铜柱固连结构,提高硬件系统的一致性,提高整个航电系统的可靠性.2) 通过串口将遥测参数发送给数传模块,数传模块接受地面站遥控指令并通过串口发送至飞行控制系统解码,数据传输一体化设计能提高通信接口的连接可靠性.3) 对加速度传感器和角速度传感器测量数据进行融合处理,修正零位漂移;航向计算采用卡尔曼滤波算法,并设计罗差修正程序.4) 飞行控制系统的姿态自稳控制模式、定高控制模式、定向控制模式等3种控制模式可进行叠加.5) 电源供应及GPS定位系统包括直流稳压模块(宽电压适应范围)、滤波模块(低ESR值电容)、GPS模块,工作电压范围大,能有效滤除纹波电压,保证传感器等测量元件的稳定工作;GPS模块采用单独稳压模块供电,保证其定位工作稳定.
4.2展望一体化无人机航电系统设计时,需要在整体上控制各子系统的相互干扰,提高系统可靠性.本文中在进行一体化设计时,力求从硬件和软件两方面着手,提高航电系统的一致性.在后续工作中,一方面,应着手设计航电设备检测系统,实现设备自检,对简单故障做到自身排除和瞬时调整[10];另一方面,应对无人机航电系统的可靠性进行量化评估与分析,并以此为依据指导系统的设计与更新[4].通过融合设备综合检测系统和可靠性量化评估融入,实现全链条、一体化无人机航电系统设计、评估与更新.
[1] 张欣,严俊,吴雪松.电子战无人机航电系统及其发展[J].航空电子技术,2012,43(2):8-13.
[2] 李靖.无人机航电设备检测系统设计与实现[J].信息通信,2013(7):51-52.
[3] 王尔申,张芝贤,雷虹,等.复合材料无人机航电系统的改进设计[J].电讯技术, 2012, 52(9):1422-1426.
[4] 吕晓林,朱文来.无人机可靠性评估方法研究[J].宇航计测技术,2012,32(6):77-79.
[5] 田光曙.基于AADL的无人机导航系统设计与分析[J].现代计算机(专业版),2014(16):48-52.
[6] 姜龙光,王燕山,刘恩朋.航空状态监测传感器技术的发展[J].测控技术,2012(4):1-3, 8.
[7] 常于敏.无人机技术研究现状及发展趋势[J].电子技术与软件工程, 2014(1):242-243.
[8] 王树丛,桂勋,陈小平.小型无人机航姿测量系统的设计与实现[J].电子测试,2013(Z1):83-86.
[9] 韩兰懿,米松林,潘建军,等.一种无人机罗差修正方法[J].航空计算技术, 2013,43(3):69-72, 79.
[10] 雷立动,裴海龙.基于无线数传模块的无人机通信系统设计[J].计算机测量与控制, 2012, 20(2):460-463.
(责任编辑郭定和)
Design and realization of integrate avionics system of small unmanned aerial vehicle
WU Yibo, LIANG Shaojun, SHEN Bin
(Department of Unmanned Aerial Vehicle, Wuhan Mechanical Technology College, Wuhan 430075, China)
The integrate design of the flight control system, power supply system, navigation and positioning system and radio-transmission system was performed.An integrate designation schema of the avionics system of small unmanned aerial vehicle economical with low cost, stable structure and strong anti-interference performance was presented and realized.In the software design, the measurement of the acceleration sensor and angular velocity sensor were fused by instant and constant fusion algorithms, and the measurement of the magnetic heading sensor were processed by Kalman filtering and compass deviation correction to realize the accurate measure of the flying attitude.Posture autostable control mode, altitude holding control mode, direction holding control mode were realized and can be superimposed in the flight control system.Direct current stabilized power supply module with wide voltage application range was utilized and the ripple voltage was efficiently filtered.In the hardware design, the hole position and size of the circuit board was unified to ascertain the consistency.
small unmanned aerial vehicle; avionics system; integration; design and realization
2015-12-22
国家自然科学基金(31200777)资助
吴一波(1978-),男,博士,讲师,E-mail:wybbok@hotmail.com
1000-2375(2016)05-0409-05
TB114.3; TP391.9
A
10.3969/j.issn.1000-2375.2016.05.005
