某4.5m车载天线开环控制标校
2016-09-21谷立永
谷立永
(中国电子科技集团公司第五十四研究所,河北 石家庄 050000)
某4.5m车载天线开环控制标校
谷立永
(中国电子科技集团公司第五十四研究所,河北 石家庄050000)
研究了如何通过开环控制系统完成天线的快速对星,通过对塔电测和大地测量使天线的光轴和电轴重合,通过确定光轴的指向来确定电轴的指向,再将电轴指向与寻北仪和双GPS等定位定向装置的读数对比,得到电轴指向和定位定向装置的固定关系,依据此关系修改跟星的控制程序,最终实现开环控制系统下的快速跟星。
开环控制;快速对星;寻北仪;双GPS;对塔电测;大地测量
1 原理
转台座架有方位俯仰两个自由度的运动,首先通过调整载车的支腿,将方位轴调整到铅锤,然后再通过对塔测试标校两个自由度的运动。
在重力的作用下,自由的液面只有绕着铅锤的轴转动才不会晃动,根据这个原理,将合像水平仪放到一个与方位轴垂直并且可以绕方位轴转动的面上,接触面必须平整光滑,保证合像水平仪不会晃动,然后转动方位轴使合像水平仪水泡的轴线指向某一个支腿,通过调整支腿高低和转动合像水平仪的旋钮使得合像水平仪的水泡处于中间位置,然后转动方位轴使水泡轴线指向另一个相邻的支腿,此时水泡偏向一侧,通过调整支腿的高低使水泡回到中间位置,再转动方位轴使水泡轴线指向第一个支腿,水泡偏向一侧,再通过调整支腿使水泡居中,依此顺序反复进行多次调整,随着调整次数的增加水泡的偏移越来越小,最后通过合像水平仪读出偏差,判断是否满足指标要求。如果经过反复调整后,合像水平仪读出的偏差已经固定,但是依旧不满足指标要求,这时就需要排查天线重心是否偏出方位轴过多和车架刚度是否不足等因素。
将方位轴调整到铅锤之后,就可以进行后续的标校工作。通过伺服系统可以驱动天线运动,伺服系统也可以读取定位定向装置的参数,但是电轴的指向不确定的,因此伺服只能通过闭环控制,逐步完成对星工作。如果将定位定向装置的参数和电轴的指向关联起来,伺服系统就可以通过开环的方式完成对星工作。
首先通过结构件的连接使定位定向装置和电轴的相对位置不再变化,然后通过对塔测试和大地测量可以确定某一状态电轴的指向,结合码盘读数将电轴指向和定位定向装置的参数对比,计算出差值,只要定位定向装置和电轴的相对位置不再变化,差值就不变,然后将差值输入到伺服控制系统中。标校完成后,就可以控制电轴的指向。
2 标校说明
2.1天线简介
以某4.5m天线为例,说明具体的标校过程。某4.5m车载天线的用途是验证卫星轨迹是否正确,将天线布置在某一地点,向卫星发射信号,在其它地点接收信号,如果信号强度满足要求,说明卫星轨迹正确。这就要求天线的指向精度很高,而且不能采用通过接收机进行闭环控制的方法,只能采用开环控制,这就需要对天线的开环控制进行标校,提高开环控制的精度。
某4.5m车载天线座架采用半转台结构,方位机构采用双电机消隙,电机通过减速器和转盘轴承传动;俯仰机构采用螺旋传动的方式,方位和俯仰同步装置均使用码盘读取角度,同时配备双GPS定位,通过双GPS读取天线的地理坐标和双GPS安装基线与真北的夹角,夹角记为G;天线外形见图1。
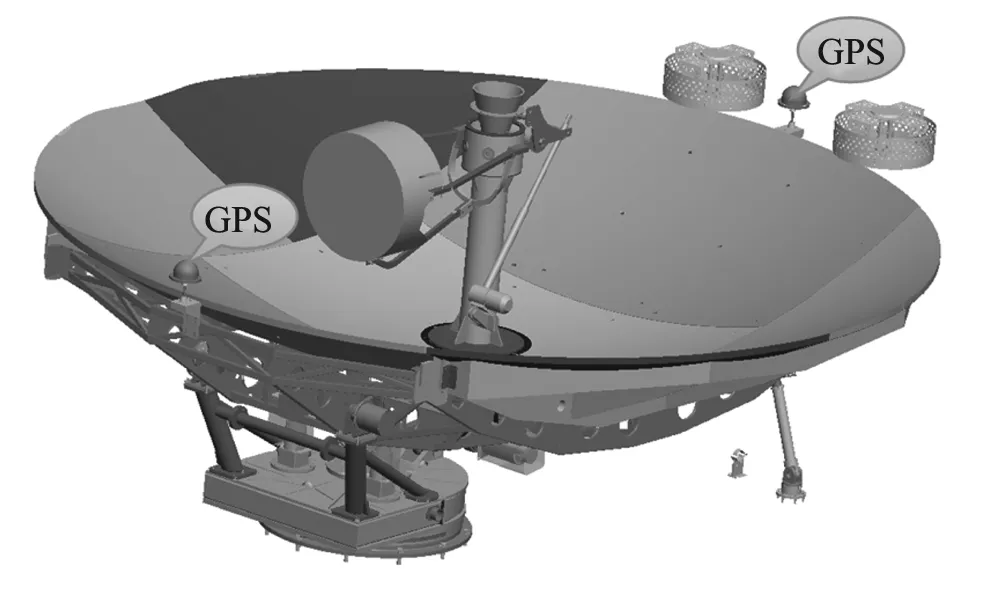
图1
天线所在位置固定后,展开天线对准卫星,电轴与真北的夹角α和与水平面的夹角β是根据天线的地理位置和卫星的轨迹计算出来的,伺服控制的最终目的是使电轴指向正确的方向。天线座架有方位和俯仰两个自由度的运动,两个独立的运动通过对应的码盘读数,对应的读数分别记为方位角A和俯仰角E。
各物理量的关系为:β=E,α=A+G+δ;其中δ为双GPS的安装基线与电轴在水平面投影的夹角,由上述介绍可知,未知量只有δ,标校的目的是计算出δ的值。
2.2标校的工具和人员
天线必须满足结构装配、伺服调试和电气测试都合格的条件才能进行标校。标校工作需要的工具有:信号源、喇叭、频谱仪、合像水平仪、经纬仪(含两个靶标)、两个三脚架、盒尺、三个对讲机、水泡、油笔。配备人员需要完成的工作有电气测试、伺服调试、操作经纬仪、展开收藏天线、移车。
2.3标校步骤
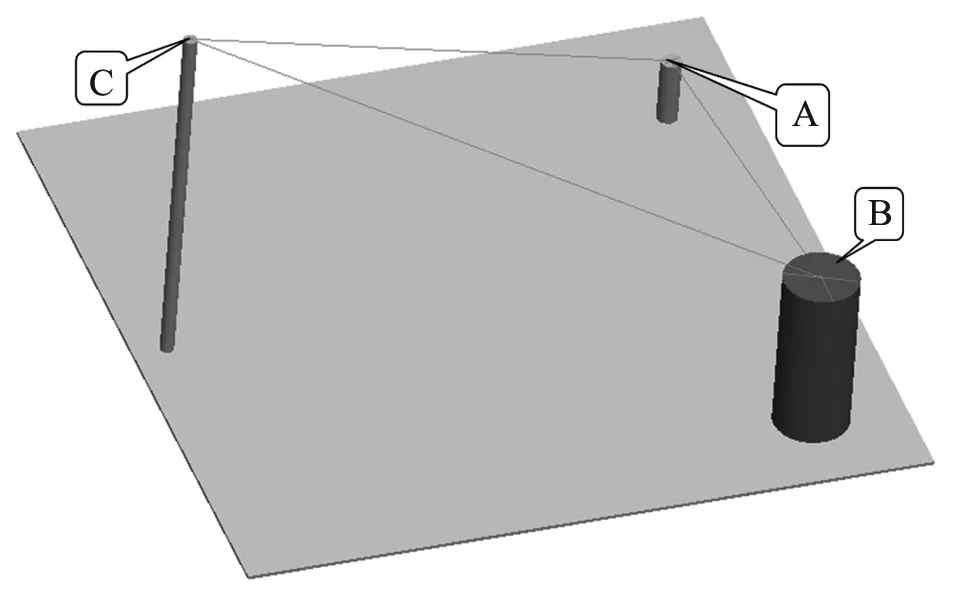
图2
本次标校工作在311站进行,场地介绍如下:楼顶有一个大地坐标点A,山上有一个大地坐标点B,天线车停在B点附近,120m高塔上选一个点C,C点根据实际情况选取,C点选取后在整个标校过程中不再变化,详见图2;操作步骤如下:
(1)天线展开,对塔测试;
(2)引大地坐标点;
(3)经纬仪测量;
(4)计算差值δ,修改程序;
(5)进行验算。
2.3.1天线展开,对塔测试
天线车停在B点附近的山头上,地面尽量平坦坚实,车尾对准C点方向,车辆停稳后展车加电,用盒尺测量天线两侧到车辆两侧的距离,使天线位于车辆中间,此时将方位码盘置零。
使用合像水平仪指导车体调平。首先将合像水平仪放置到方位转盘的上端面上,使合像水平仪水泡的轴线指向左前的支腿,调整左前支腿和合像水平仪的旋钮,使合像水平仪的水泡居中,然后转动方位轴,使合像水平仪的水泡轴线指向右前支腿,调整右前支腿使水泡居中,然后转动方位轴使水泡轴线再指向左前支腿,调整左前支腿使水泡居中,再转动方位轴使水泡轴线指向右前支腿,如此反复进行,直到方位轴转动过程中合像水平仪的读数在5丝以内,此时车辆调平工作完成。
展开天线准备电测。携带一个三脚架、一个经纬仪靶标、信号源和喇叭到高塔上,选取一个适合电测的位置定为C点,架设三脚架,将喇叭安装到三角架上,用油笔画下三脚架支腿的位置,用盒尺记录喇叭中心的高度;山上的人转动天线,用频谱仪手动对信号,对准后等待。高塔上的人取下喇叭,将经纬仪靶标安装到三脚架上,调整三脚架高度,使靶标高度与喇叭高度一致。
2.3.2引大地坐标点
根据311站大地坐标点的分布和场地情况,无法只使用A点和B点完成标校,必须通过AB两点引出C点,通过C点观察B点完成标校。
在A点布置一个经纬仪靶标,在B点架设经纬仪,由于已知B、A两点的大地坐标,可以算出B对A与真北的角度γ,让经纬仪对准靶标,将经纬仪方位读数置零,然后顺时针转动(360°-γ),再将经纬仪方位读数置零,再将经纬仪对准靶标,此时经纬仪方位读数为γ。再将经纬仪对准C点的靶标,记录此时经纬仪方位读数ψ,然后携带经纬仪到C点。将另一靶标安装到B点的三脚架上。取下C点的靶标,安装经纬仪,使经纬仪的中心高度和喇叭中心高度一样,用经纬仪对准B点的靶标,将经纬仪方位码盘置零,经纬仪顺时针转动(180°-ψ),再将经纬仪方位码盘置零,再将经纬仪对准B点靶标,此时经纬仪方位读数为(ψ+180°)。
2.3.3经纬仪测量
将经纬仪对准副面的背面中心,目的是使经纬仪的光轴和天线的电轴重合。记录此时经纬仪的方位读数和俯仰读数,分别记为λ和ω。λ=α=A+G+δ,ω=β=E。
2.3.4修改程序
通过码盘置零的方法使β=E,然后再将天线转到朝天状态(E=90°)安装水泡,并调整水泡水平, 后期使用过程中如果码盘损坏,可以通过水泡复位码盘的零位。δ=λ-A-G,将计算出的δ的值输入到程序中,此时天线控制界面显示的值为电轴与真北的夹角α和电轴与水平面的夹角β。
2.3.5进行验算

某4.5m车载天线在此次标校中计算出的指向精度ε为0.105°,天线对星测试后发现指向精度为0.1°,与标校结果接近,指标要求指向精度小于0.18°,设备性能满足要求。
3 总结
通过电气对塔测试和经纬仪测量使光轴和电轴重合,通过测量光轴的指向角度来确定电轴的指向角度,进而将电轴的指向和寻北装置联系起来,形成开环控制系统,经过反复试验得出开环系统的指向精度。
[1]秦顺友.频谱分析仪的原理、操作与应用[M].西安:西安电子科技大学出版社,2014.
[2]董景新,赵长德,郭美凤,陈志勇,李冬梅.控制工程基础[M].第3版.北京:清华大学出版社,2009.6.
[3]程锴.一种利用经纬仪进行雷达精度检测的分析方法及应用.南京理工大学硕士学位论文.
[4]刘宇波,髙立民,赵天宇.光纤陀螺寻北仪误差系统分析[J].红外与激光工程,2007,09.
[5]陈振,秘金钟,王权,李鹤峰,赵辉.基于多基准站北斗/GPS双系统与单系统伪距差分定位效果比较,第六届中国卫星导航学术年会,2015.
[6]吴凤高.天线座结构设计[M].北京:国防工业出版社,1980.
Openloopcontrolofa4.5metervehicleantenna
GULi-yong
(The 54th Research Institute of CETC, Shijiazhuang Hebei 050000,China)
Itisstudiedhowtousetheopenloopcontrolsystemtoaligntheantennatosatellitefast.Theopticalaxisoftheantennaandtheelectricaxisoftheantennaarecoincidentbydoingthetowerelectrictestandgeodeticsurvey.Wecandeterminethedirectionoftheelectricaxisbydeterminingthedirectionoftheopticalaxis.ComparetheelectricaxisdirectionandthereadingofnorthseekinginstrumentorthedoubleGPS.ThefixedrelationshipbetweenthevectoroftheelectricaxisandthevectorofthenorthseekinginstrumentorthedoubleGPSisobtained.Modifythecontrolprogramonthebasisofthisrelationship.Aligningtheantennatothesatellitewiththeopenloopcontrolsystemisfinallyrealized.
Openloopcontrol;Fastalignmentsatellite;Northseekinginstrument;DoubleGPS;Electricaltestingofthetower;Geodeticsurvey
2016-03-27
谷立永(1989-),男,河北石家庄人,助理工程师,主要从事天线座架的结构设计的开发研究.
1001-9383(2016)02-0072-04
TN820
A