三洋驱动器在车载天线伺服系统中的应用
2016-09-21张国志齐晓娜
张国志,齐晓娜
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
三洋驱动器在车载天线伺服系统中的应用
张国志,齐晓娜
(中国电子科技集团公司第五十四研究所,河北 石家庄050081)
介绍了车载天线伺服的工作原理,并对三洋交流伺服进行详细的介绍,描述了其控制方式和反馈方式。在车载天线伺服设备中对其如何应用进行了详细描述,同时对其关键的参数设置进行了叙述。介绍了使用三洋交流伺服的一些注意事项和应用在车载天线伺服设备上的好处。
三洋;交流伺服;车载天线
引言
在天线伺服系统当中,控制对象的不同、控制精度要求不同选择的驱动器、电机则不相同。车载天线是指安装在汽车车顶的卫星接收天线,由于安装空间和载重的限制,对车载天线各部件的小型化、轻量化的要求更为突出。交流伺服驱动器因其转动惯量小,同功率下有较小的体积和重量在车载天线上应用的比较普遍[1]。目前世界比较主流的交流伺服产品驱动部分欧洲主要由伦茨,博世、力士乐等公司提供,日系主要由安川、松下、三菱等公司提供。通过对以上几种产品的调研,选择了一款日本三洋电机推出的交流伺服产品作为车载天线的主要驱动部件。
1 三洋交流伺服
1.1简要介绍
三洋交流伺服是最早进入国内的伺服电机系统之一,以其卓越的性能,高速、精确、灵活、使用寿命长、性价比高等特点闻名于世。可以实现不同控制方式的切换,具有输出检测功能、自动滤波功能、实时自整定功能,另外内藏再生处理功能,可以和电脑进行通讯,进行伺服参数的编辑、设定和各种监视等功能。笔者选择了三洋R系列交流驱动器进行说明。
在车载天线伺服系统中,使用该驱动器的方式主要是上位机输出相应的转向,发出不同频率的脉冲,驱动器依据此驱动电机转动,同时位置编码器返回实时位置给上位机,上位机判断位置到位后停止驱动器转动,实现天线系统对准卫星信号。
1.2控制及接线
三洋R系列交流驱动器[2]可以选用三种控制方式:位置、速度和转矩控制方式。不同的控制方式的输入也不同,在这里选择使用位置控制方式。输入可以选择使用模拟输入或者数字脉冲输入方式,这里选择了脉冲输入方式。驱动器的基本接线关系如图1所示。
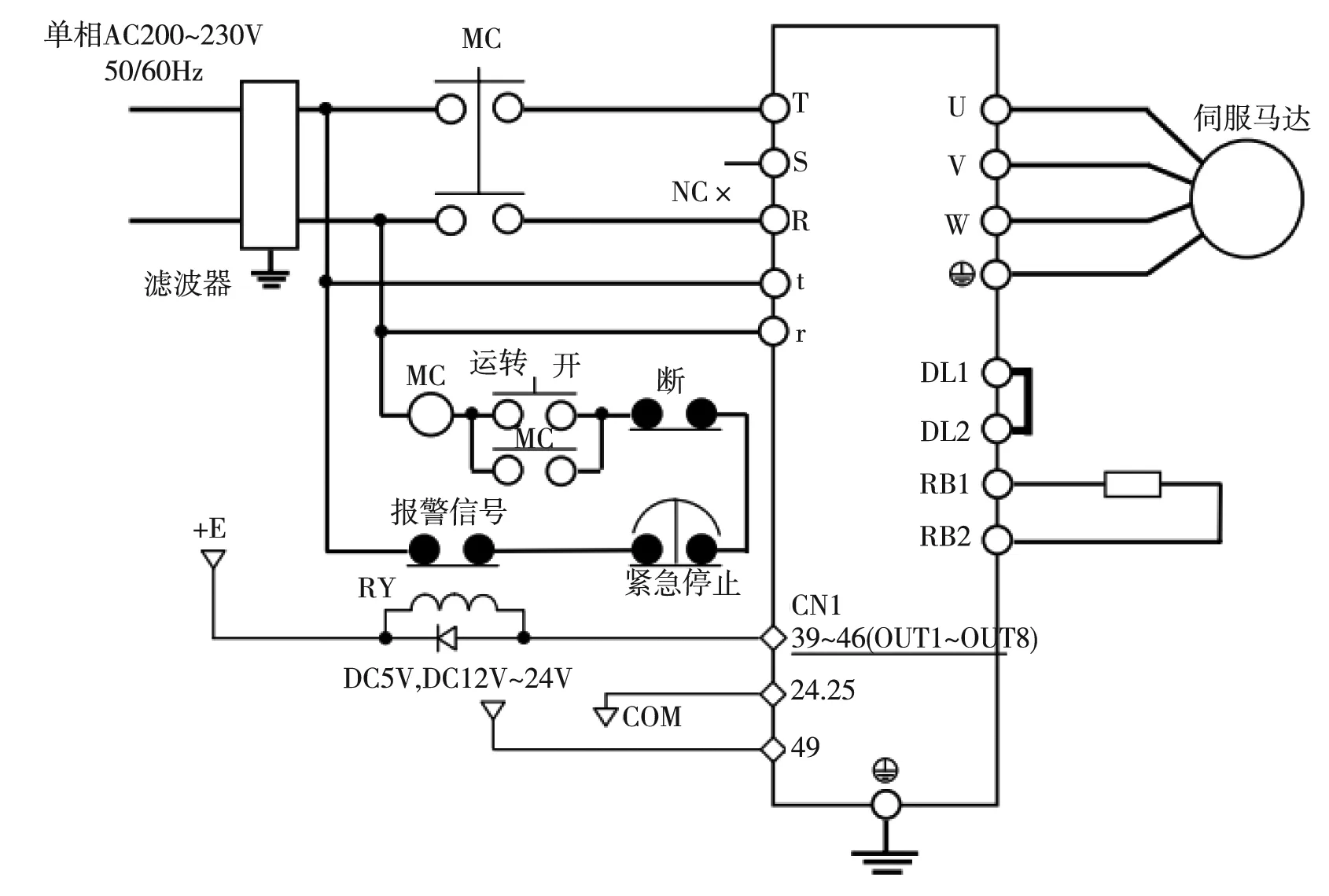
图1 驱动器的基本接线
1.3反馈方式

图2 编码器接线示意图
通过相应的参数,可以设置编码器信号的输出形式:输出二进制码,输出10进制ASCII码或者编码器信号直接输出。为了便于使用,使用输出二进制码作为车载天线使用,二进制码格式如图3所示。
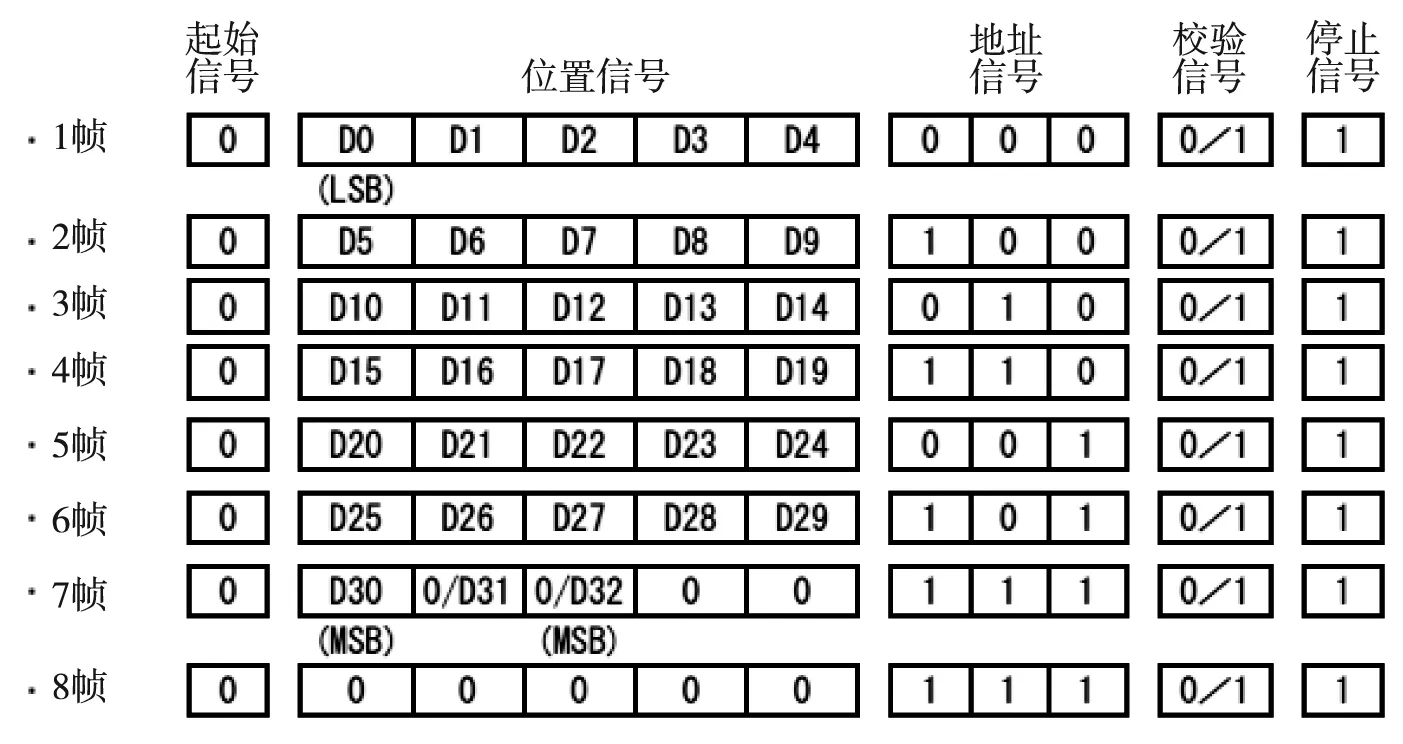
图3 二进制码格式图
其中D0~D16为单圈的绝对值,D17~D32位转动圈数。
2 参数设置
三洋驱动器共有13组参数可供设定,分为系统参数和一般参数两种,每种参数下均有数个参数,下面将必要设置的参数进行介绍,其余参数可使用默认值或根据需要进行微调。
系统参数设置:
1) 00项,电源输入类别,选择输入电源为单项输入还是三项输入,在此系统中为单项输入;
2) 01项,电机编码器类型,选择是增量编码器还是绝对编码器,在此选择绝对编码器;
(2)原因调查分析:5月2日相关技术人员共同对HXD1C-6109机车进行检查发现:①查询机车微机显示屏内数据,发现在故障发生时刻多次报“主断路器卡分”故障。②库内高压试验,机车升弓正常,闭合主断路器2S后主断路器断开,与线上故障相同。③打开机车主断路器防护面板,发现防护罩内有异物,进一步确认为主断路器辅助连锁触头滚轮,检查主断路器辅助连锁,发现左侧第4个辅助连锁无触头滚轮,对应线号“M122”(如图2所示)。④根据现场检查情况来判断,机车主断路器辅助连锁第4个触头滚轮断裂掉落是造成此次机车故障救援的根本原因。
3) 08项,控制方式选择,选择位置控制方式。
一般参数设置:
1)Group1中02项,位置环比例增益。需要依据实际天线伺服类型进行调节,也可由驱动器总动调节;
2)Group1中13项,速度环比例增益。需要依据实际天线伺服类型进行调节,也可由驱动器总动调节;
3)Group1中14项,速度环积分时定数。需要依据实际天线伺服类型进行调节,也可由驱动器总动调节;
4)Group1中15项,负荷惯性能量比。设置值=负荷惯量/电机惯量*100%;
5)Group8中00项,设置输入指令的极性,一般设置为速度指令为正,电机正向旋转;
6)Group8中15项,设置电子齿轮比,可以任意地设置每单位指令脉冲对应的电机的速度和位移量;
7)GroupC中00项,选择编码器类型,0为绝对编码器,1为增量编码器,在此系统中为绝对编码器;
8)GroupC中07项,编码器信号输出形式,在此选择二进制码输出。
3 使用注意事项
3.1电缆长度
由于驱动器使用的是低电压脉冲信号进行控制,所以在驱动器与电机之间的安装距离不宜过长,以不超过30m为宜,太长的电缆将有可能影响到脉冲输出和编码器信号输入,同时电缆宜选择双绞屏蔽型号,两端可靠接地,同时信号电缆和电机电缆要尽量分开走线,防止串入干扰。
3.2编码器清零
三洋驱动器的绝对式编码器采用锂电池供电的方式,当电池失效后更换电池需要将编码器清零,否则驱动器将不能工作,清零方法如下:
1) 驱动器上电后将一般参数Group9中03项修改为1,设入驱动器;
2) 将Group9中03项继续修改为6,设入驱动器;
3) 驱动器重新上电,清零完毕。
4 结语
三洋交流伺服驱动器直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,应用在车载天线伺服系统中可大大提高系统的相应速度和控制精度,提高天线的指向精度。三洋驱动器接线简单,控制逻辑清晰,可以省略许多额外的电路,获得满意的控制效果。车载天线一般布线距离不会很长,因此上文提到的电缆长度问题将不会出现,故而将三洋驱动器应用的车载天线系统中将有得天独厚的优势。
[1]寇宝泉,程树康.交流伺服电机及其控制[M].机械工业出版社,2008.
ApplicationofSANYOdriverinvehicleantennaservosystem
ZHANGGuo-zhi,QIXiao-na
(The 54th Research Institute of CETC,Shijiazhuang Hebei 050081,China)
Thispaperintroducestheworkingprincipleofthevehicleantennaservosystem,andintroducestheACservosystemofSANYOindetail,anddescribesitscontrolmodeandfeedbackmode.Inthevehicleantennaservodevice,theapplicationofthesystemisdescribedindetail.Atthesametime,thekeyparametersofthesystemaredescribed.SomenotesontheuseoftheSANYOACservoandthebenefitsoftheapplicationintheon-boardantennaservosystemareintroduced.
SANYO;ACservo;Vehicleantenna
2016-04-10
张国志(1983- ),男,河北省石家庄人,工程师,研究方向:天线伺服.
1001-9383(2016)02-0076-04
TN820
A
