驱动轮轴助力机械手设计研究
2016-09-20张发厅
张发厅
(黄河科技学院,河南 郑州 450063)
驱动轮轴助力机械手设计研究
张发厅
(黄河科技学院,河南郑州450063)
本文对机械手的功能及各部位进行了介绍,分析机械手的组成及运动方式,介绍机械手手爪及臂部及腰部和支架的设计计算,以期为机械手的生产厂家进行设计及用户的使用提供参考.
机械手;手爪;臂部;设计
1 引言
机械手是仿照人类的手部结构,按照人们的要求和设定的程序在规定时间内完成取料、物料的传送或者执行某种动作的自动化控制设备.在自动化生产中得到广泛的应用.
本次对驱动轮轴的助力机械手进行设计,主要包括机械与结构部分的设计,驱动机构的选择方面.确定机械手的座标系、自由度问题、驱动机构等部分,为机械手的设计和使用提供理论参考.
2 机械手各部位的运动分析及介绍
2.1机械手各部位的运动分析
工业机械手一般情况下根据手臂的运动形态,按坐标系定位的理论的不同一般可以分为极坐标系、直角坐标系、柱坐标系及多关节式四种类型.本设计中机械手主要由以下部分组成:(1)利用直线气压缸驱动运动机构实现卡具的张合.(2)手部回转运动用回转型气压缸来实现.(3)腕部采用轴承链接,以减小阻力,实现小臂的回转运动.(4)肘部,采用轴承链接,减小阻力,以实现弯臂的回转得以在平面中定位. (5)臂部,采用一个直线型的气压缸进行驱动,推动大臂上下运动以实现大臂围绕腰部的旋转运动,实现执行机构在垂直方向的定位.(6)腰部采用轴承链接,减小阻力,实现整个机构的旋转动作.腰部、肘部与手部,三个旋转副,使整个机构的操作范围实现了立柱周围直径3米内从任意方向进行夹取零件.
2.2机械手各部位介绍
1.驱动机构
驱动机构可分为气动、液压、电动和机械驱动等四类.因为工厂一般都有气源,所以气动成本相对较低,而且安装方便,因此工业中启动选择较多.
2.执行机构
(1)手部一般是回转机构,大多数都是两个手指的机械手;常见形式有:移动槽轮结构、连杆结构、齿轮及齿条结构和重力结构等.
(2)腕部是用来连接手指和手臂的,用来改变被夹取工件的方位,一般腕部都有回转结构组成.
(3)臂部是链接着手腕并带动手腕及其之后的部分在工作范围内进行运动的.
3.控制系统分类
机械手的主要控制因素是空间坐标位置,并注意其加速度、速度等特性.
3 机械手手部设计计算
3.1基本要求
(1)具有足够的夹紧力;(2)手指的张开角度必须在使用范围之内;(3)要求结构必须紧凑、重量相对较轻、效率要高.
3.2机械手手抓的设计计算
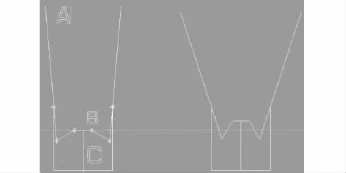
图1 手部结构、受力分析
1.选择手抓形式及夹紧装置选择
本设计是驱动轮轴助力机械手,手抓张合直径在30毫米到80毫米之间,夹取最大重量为60Kg.采用夹持式二指回转型手抓.机械手手指在气压缸伸出作用下张开.
2.手抓力学分析
图1为常见的连杆杠杆式手部结构的卡具夹紧和松开状态.
手部结构、受力分析:
A——手指B——销轴C——气压缸
拉力F在B点,方向向上且过销轴的中心点,两手指A的对销轴的反作用力分别为F1和F2,其力的方向垂直于手指向外,拉力F由下式计算.
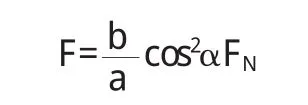
对受力分析可知,最好角度选为30度到60度之间.
3.手抓夹持范围计算
手抓张开直径大于50mm,活塞杆行程最小为13.5mm.
手指的长度为a=80mm加上定位内b=40mm,中间连接杆长度为c=40mm.拉杆长度d=20mm.支架宽度为e=80mm.当拉杆与支架平齐时手指张开最大.如图3.2(b)所示.所以最大半径
Rmax=(((e-d)/2+e/2-20)*3^0.5)/2
=50*1.732/2=43.3mm,取43mm.
所以当两手指碰到一起时,手指为夹角120度角,长度为30mm,如图3.2(a)所示.内部可夹取的轴半径为Rmin,Rmin=30/2/2*3^0.5=12.99mm,取13mm.
手抓夹持、范围为直径26mm到直径86mm.图2(a)中,手指长80mm,手抓张开角为0,此时最小夹持直径为26mm. 图2(b)为手指张开时的情况,其中夹持半径为86mm.

图2 手抓夹持范围计算
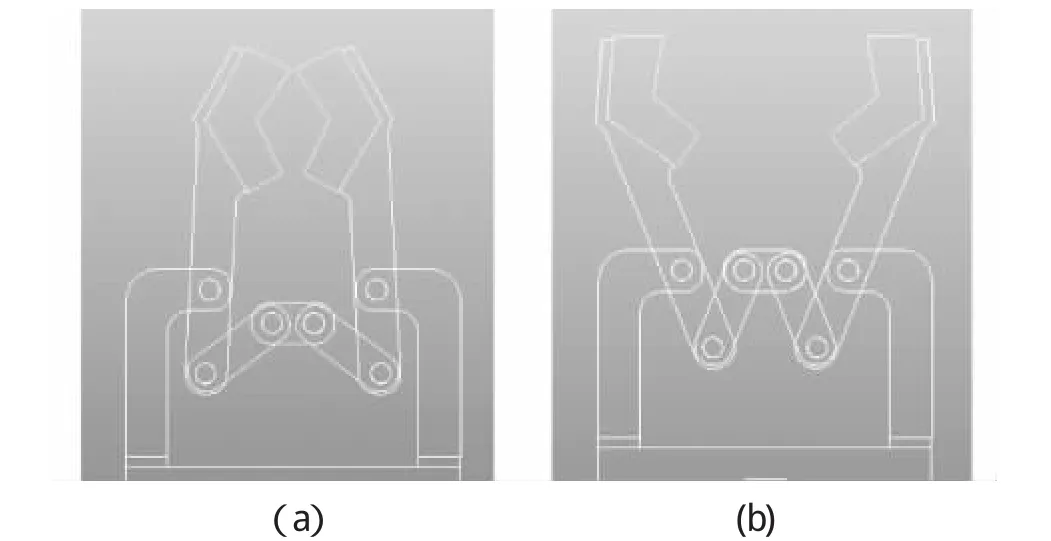
图3 手抓张开示意图
4 臂部设计
机械手的手臂部件的运动包括回转、伸缩和升降运动3种运动方式,本次设计为手臂的回转运动.
4.1大臂的尺寸与结构
大臂要保证整体的高度运动范围在0—1000mm以上,运动的角度最大不得超过90度,即上下不能大于45度,为取大臂有效长度为1800mm.
因为其没有配合等要求,所以采用铸铁直接铸造.截面采用矩形空心结构,能够承受更大的弯曲应力.如图4所示:
4.2弯臂尺寸与结构
弯臂为第二段手臂,长度决定着水平工作范围,由大臂确定其有效长度1200mm,为了使受力较为均匀,采用铸造矩形空心截面,竖直尺寸为450mm.如图5所示:
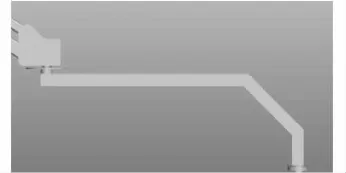
图5 弯臂结构
4.3小臂尺寸与结构
小臂直接连接着腕部,小臂长度选为1580mm.因小臂不受弯力影响,所以选取圆形空心截面铸造生产.
5 腰部与支架的设计计算
5.1腰部的整体设计
本次设计把驱动大臂上下转动的气压缸安装在腰部由气压缸推动大臂向上使其向上转动.顶端用两个销轴固定两个大臂的杆件的位置,使其只能绕其旋转.腰部的底端直接安装在支架上,用轴承链接,保证腰部能够绕支架进行旋转.腰部定在2300mm以上,总高度为3300mm,所以腰部尺寸为1000.
5.2支架整体设计
支架起支撑整个机构的作用,与腰部用轴承链接无其他配合尺寸,采用铸造圆形空心截面.高度为2300mm.
结束语
本文主要对机械手功能及各部位进行介绍,重点对机械手手爪及臂部进行设计计算,并对腰部和支架的设计进行了简单介绍,分析机械手各部位的运动,为机械手的设计和应用提供理论参考.
〔1〕孔秀艳.一种四轴搬运机械手的PLC控制[J].大众科技,2008(07):112-113.
〔2〕刘轩.王丽伟.机械手的 PLC控制[J].机床电器,2006 (10):34-49.
〔3〕言纪兰.懂峰.基于PLC控制的搬运机械手的应用[J].机械工程与自动化,2008(06):31-34.
〔4〕易鹏.直角坐标型气动机械手轨迹跟踪控制研究[D].西安航空技术高等专科学校,2013.
〔5〕杨振球.简易型精确定位气动机械手的研究及其应用[M].北京:高等教育出版社,2006.
TP241
A
1673-260X(2016)08-0031-02
2016-05-07
河南省重点学科资助项目(豫教高2012(186));河南省民办高校品牌专业(豫财教2013(140));河南省本科工程教育人才培养模式改革试点专业(教高2012(964));河南省专业综合改革试点(教高2012(859))
