导弹底罩分离动力学建模与仿真
2016-09-20李慧通黄意新哈尔滨工业大学航天学院黑龙江哈尔滨150001
李慧通,赵 阳,田 浩,黄意新(哈尔滨工业大学航天学院,黑龙江 哈尔滨150001)
导弹底罩分离动力学建模与仿真
李慧通,赵 阳,田 浩,黄意新
(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)
导弹冷发射出筒过程中,需要安装底罩来保护一级发动机,发射后要将底罩抛离并确保其不会砸到地面设备,设计了采用纵向分离加侧推的组合分离方案,采用推冲器作为纵向分离能源以及侧推发动机作为侧向移动能源。导弹底罩分离过程中受多种不确定性因素影响,考虑侧推发动机、推冲器、空气负压力以及阵风等多种因素对分离过程的影响,对导弹底罩分离过程建立了分离运动学和分离动力学模型。通过仿真得到相关参数对分离过程的影响,确定了分离设计参数值,最后利用蒙特卡罗方案得到底罩的横移和落区范围。
分离;底罩;蒙特卡罗法;仿真
网址:w w w.sys-ele.co m
0 引 言
目前,导弹的发射大多采用冷弹射的方式,即由置于发射装置下端的燃气发生器产生高温高压燃气将箭体从发射筒中弹出。导弹在冷发射过程中安装底罩来保一级发动机喷管,防止主发动机被高压气体损坏。弹射到一定高度后需要将底罩抛离,然后主发动机点火,分离过程中对点火控制装置技术和导弹点火时姿态要求非常高。底罩分离的安全性和稳定性直接关系到导弹后续稳定飞行。
对于冷发射出筒的导弹,应在分离命令发出后及时分离,在分离过程中要避免与弹体和发动机碰撞,底罩与弹体分离后,在导弹主发动机点火以前要尽快远离导弹的中轴线,防止发动机的高速气流直接冲击底罩,影响主发动机的正常点火。底罩下落过程应按照预定轨道进行,并且能够避开相关设备和人员。
一种分离方案是改变底罩外形,使底罩在向下分离过程中产生侧向气动力,但是实际分离过程中侧向力远小于轴向力,无法在一定时间内使底罩横移到安全距离。目前常用的两种底罩分离方案:①侧推方式,解锁后依靠分离弹簧预紧力或者推冲器使底罩与弹体沿轴线分离,然后采用固体小火箭作为能源,将底罩推离导弹中轴线;②旋抛方式,导弹与底罩用铰链机构连接,解锁后依靠分离弹簧预紧力或者推冲器的冲击力使底罩绕与弹体连接的铰链轴转动,转到一定的安全分离角度时底罩脱离弹体自由运动从而避开地面或者海面设备[1]。
对于导弹罩体分离,国内外学者做了一系列研究[2 8],文献[9]提出了导弹底罩整体侧推方案,对底罩的分离过程和动力学特性进行了分析研究,并采用A D A M S软件进行了分离过程仿真。文献[10]提出一种将尾罩滞留于发射筒内的尾罩分离方案,并对尾罩与弹体的连接方式、尾罩滞留装置方案、燃气排出方式等关键技术问题进行了研究。文献[11]采用蒙特卡罗打靶法对分离过程进行仿真,得到了在多偏差因素影响下分离体运动范围。文献[12]对火箭尾罩导向段分离过程进行了仿真分析,利用非线性有限元软件A B A Q U S对分离过程进行数值模拟,得到了两体分离运动情况,并对导向销的强度进行校核。文献[13]对导弹尾罩分离过程中的不确定性进行了研究,得到了参数偏差对分离过程影响情况。文献[14]对低空高速飞行整流罩分离技术现状和发展前景进行了研究,总结了目前存在的问题,提出了其发展趋势。现阶段底罩分离研究涉及到的偏差因素较少,对侧推分离和落地点散布情况研究较少。
底罩分离后在地球重力作用下向下坠落,为了防止底罩与喷管相撞和防止发动机点火后气流冲击底罩,进而砸坏地面发射设备或者潜艇艇身,需要将分离后的底罩推离,使底罩落到安全区域。本文设计了采用推冲器和侧推火箭作为分离能源的分离方案,将分离后的底罩横向推离设备区,保证设备安全。建立了底罩分离约束段和自由飞行段动力学模型,对分离过程进行动力学仿真,对相关参数对分离过程的影响进行了研究,最后得到底罩的运动变化情况和落地点分布情况。
1 分离过程分析
分离系统包括上面级分离体(导弹弹体)和下面级分离体(底罩)、分离导向机构(导向销)、推冲器和侧推火箭等,如图1所示。当分离命令发出后,低冲击分离机构解锁,底罩在推冲器的作用下沿导弹中轴线向下运动,此时底罩和弹体之间有导向约束力。当底罩与弹体达到一定距离,导向机构脱离,底罩和导弹弹体成为自由体,当底罩分离到距离一级发动机喷管安全距离后,侧推火箭点火将底罩推离导弹中轴线,最后导弹主发动机点火继续飞行,底罩则按抛物线规律掉落地面或者海面。

图1 导弹底罩分离示意图
根据分离方案,可以将底罩分离过程划分为4个阶段,如图2所示。
第一阶段为爆炸螺栓解锁后,推冲器开始工作,但底罩还没有脱离导向销,本阶段底罩只有沿导弹中轴线方向有运动。
第二阶段底罩脱离导向销,此时导弹本体和底罩成为两个自由体,没有约束力,在惯性作用下底罩继续沿导弹轴向分离。
第三阶段为侧推火箭点火,底罩在侧推火箭作用下横向运动,离开导弹主发动机点火影响区域。
第四阶段侧推火箭工作结束后,底罩在重力作用下沿抛物线运动,最后落于地表或者海面。
图2 分离阶段划分示意图
2 底罩仿真建模
2.1 模型简化
首先进行模型假设,将底罩分离后坠落过程进行合理假设,建立动力学仿真模型。
(1)将弹体和底罩视为无变形刚体;
(2)风的影响只考虑水平风,不考虑垂直气流变化的影响;
(3)推冲器的作用力简化为恒定值;
(4)侧推发动机关机后,认为底罩只受气动力和地球引力的影响;
(5)下落过程中认为重力加速度为恒定值;
(6)由于分离高度较低,不考虑地球曲率和自转的影响。
在上述假设基础上,进行六自由度底罩动力学建模。
2.2 动力学模型
设底罩质量为m,转动惯量与惯量积为J(Jx,Jy,Jz,Jxy,Jxz,Jyz),底罩所受外力为F(Fx,Fy,Fz),相对底罩质心的转动力矩为M(Mx,My,Mz),底罩质心位移变化为r(rx,ry,rz),绕质心的转动角速度为ω(ωx,ωy,ωz)。可得底罩六自由度动力学方程[15]如下:

底罩绕质心的转动角速度(ωx,ωy,ωz)与底罩的欧拉角速度关系为

底罩分离第一阶段受到导向销的约束,导向机构长0.2 m,导向销限制分离体之间的相对转动和横向移动,使分离体只能在弹体中轴线这一个方向移动。
假设jax,jay,jaz以及jbx,jby,jbz为弹体和底罩垂直于受约束轴的单位向量,当分离体之间相对转动受到约束时,其标量积为零,由于在3个转动方向上都受到了约束,经过两次微分后可以得到转动约束方程为

式中,jax=[100]T,jay=[010]T,jaz= [001]T;jbx=[100]T,jby=[010]T,jbz= [001]T。
假设ra和rb为弹体和底罩上导向销机构受力位置在惯性系中的位置向量,当分离体在ey方向和ez方向没有距离变化时可以得到以下平动约束方程:
弹体和底罩之间通过导向销产生作用力和反作用力,弹体和底罩之间只能沿中轴线相对移动,存在一个自由度,运动过程中由于力作用节点的移动会对分离体的作用力矩产生影响,此时力和力矩平衡方程为

通过联合底罩侧推开始时必须保证底罩的上端面完全脱离导弹主发动机喷管的下端面,并在导弹轴线方向上有一定的安全距离,同时要保证在主发动机点火时,底罩已经侧移到一定距离外,受主发动机气流干扰要保证在一定范围内,避免底罩做无规则运动。
在底罩侧抛过程中,根据分离时导弹飞行高度,侧推发动机点火与导弹主发动机点火间隔,底罩质量几何参数,侧推力大小和工作时间来,保证主发动机点火时,底罩已飞出排气流作用区,并且保证在多种参数存在偏差的情况下,底罩落点在安全区域内,不会损伤地面或者海面设备。
在导弹主发动机点火时,底罩已经横移到弹体横截面范围以外,则认为底罩的后续飞行可以忽略主发动机的影响。则必须满足

式中,Fd为侧推发动机推力,m为底罩质量,td为侧推火发动机点火与主发动机点火时间间隔,D为导弹底端横截面直径。
为了保证底罩落地点在安全范围内,需要满足

以及

式中,H为分离时刻底罩质心所处高度;th为底罩从分离到落地所需时间;v0为分离时刻导弹飞行速度;vw底罩与导弹之间的相对速度;tf为侧推发动机工作时间;L为了落到安全区域底罩需要飞行的距离。
3 分离受力模型
3.1 分离力分析
在分离过程中,底罩和弹体的受力情况比较复杂,同时还受到各种环境干扰因素的影响。以导弹头部所指方向为正方向,分离过程中作用在底罩的外力变化如下:
式中,G为底罩的重力;R为底罩受气动力;Fi(i=1,2,…,4)为4个推冲器的推力;Ff为分插拔脱力;Ft为导向摩擦力;Fd为侧推火箭力;Fc燃气后效推力;Fn为空气负压力。
式中,MR为气动力矩;Mi为4个推冲器推力对质心力矩;Mf为分插拔脱力矩;Md为侧推火箭力矩;Mc燃气后效力矩;Mn为空气负压力矩。底罩受力如图3所示。
图3 底罩分离受力图
分离过程中,推冲器力简化为恒定力,方向垂直于分离面,分离开始后推冲器开始工作,当分离面距离大于0.1 m时,推冲器结束工作。燃气后效和空气负压力为随时间变化的力,力作用点认为在底罩中轴线上,力的大小和作用时间通过插值相应的压力表得到。
下文对较复杂的侧推火箭力模型和气动力模型进行说明。
3.2 侧推火箭模型
理论上侧推发动机的推力线应该通过底罩的质心,并与底罩端平面平行,以保证底罩侧面受力沿水平方向。为了防止弹射过程高压环境对侧推发动机的损害,需要将侧推发动机主体部分安装在底罩内部。底罩安装示意图如图4所示。
图4 底罩安装示意图
侧推发动机点火后将底罩沿导弹中轴横向方向推离主发动机喷气的影响区域,侧推发动机的偏差对底罩分离后落点位置的影响很大。推力点位置偏移、推力方向与理论方向的偏差、侧推发动机推力偏差是3个主要影响因素。推力点的偏移和推力方向偏差会导致推力线不通过底罩的质心,导致底罩姿态发生较大改变,增大飞行过程中的不确定性,扩大了底罩的落区范围。侧推火箭偏差如图5所示。

图5 侧推火箭偏差示意图
将侧推发动机的推力作用位置简化到一个点,假设Od点为侧推发动机推力作用点,O点为弹体质心在底罩纵切面的投影点。侧推发动机位于底罩侧壁,侧推发动机的作用力随时间变化而改变,推力值通过推力插值表进行插值计算后得到,假设某时刻侧推发动机推力Fd与箭体纵轴重合,这时发动机推力Fd作用在箭连体坐标系上的分量为Fd=[Fd00]T。
由于侧推火箭推力线与质心与喷管连线存在大小为λ的偏角,发动机推力线在O XtZt平面上的投影与质心坐标系Xt轴的夹角为ρ。推力作用偏离中心轴线距离d。
则侧推发动机推力在弹体坐标系上的分量为
假设侧推发动机推力点在连体坐标系的纵向位置为l,则推力位置相对连体坐标系原点矢量为r=[ldcosρdsinρ]T,分离体质心位置在连体坐标系下的矢量为rc=[xcyczc]T,则侧推发动机推力的作用点相对质心的矢量为
由于推力偏心产生的力矩为M=rd×Fd,通过以上流程,可以得到侧推发动机的在质心坐标系下3个轴方向的推力大小以及力矩大小。
3.3 气动力模型
空气动力R沿速度坐标系可以分解为3个分量,分别为阻力Rx,升力Ry和侧向力Rz,其大小和来流的动压头q和分离体的特征面积S成正比,可以得到
式中,ρ为分离高度的大气密度;Vk为分离体相对空气飞行速度;Cx为阻力系数;Cy为升力系数;Cz为侧力系数。为了分析分离体旋转运动方便,将气动力矩MR沿弹体坐标系进行分解,可以得到滚转力矩MRx,偏航力矩MRy和俯仰力矩MRz,气动力矩表达式为
式中,L为特征长度;mx为滚转力矩系数;my为偏航力矩系数;mz为俯仰力矩系数。气动系数通过攻角和侧滑角对气动系数表插值得到,分离体气动系数表通过事先理论计算或者风洞试验得到。
分离过程中,水平风对底罩下降过程影响很大,风的大小和方向是随机的,分离时可能处于一定范围内的任何风速和风向角影响下。仿真过程中,分离时间和底罩下落时间一般在6 s以内,时间短,可以假设风速是恒定的,将风速与分离体惯性系下速度进行合并,得到在风作用下的分离体相对于大气的速度,然后求解气动力。设风速Vw,风速角为δ,当风方向与惯性系下X轴正方向重合时为0°,向惯性系下Z轴方向依次旋转360°一周。可得以下方程:
式中,V为分离体惯性系下速度;Vk为相对大气速度。
4 底罩分离仿真
4.1 分离参数设计
抛底罩过程必须保证底罩与弹体不发生碰撞,这就要求侧推火箭点火时底罩与弹体的纵向位移符合要求条件。同样,主发动机点火时必须要求底罩横移出发动机气流作用范围。本文针对某导弹底罩分离过程进行了仿真,测试了推冲器力下底罩的纵向分离距离和不同侧推火箭作用下底罩横移量,得到了能够使底罩成功分离的分离设计方案。
解锁命令发出后,底罩在推冲器的作用下沿导弹中轴线方向与弹体分离,推冲器在0.1 m范围内起作用,不同推力大小的推冲器对解锁后纵向距离变化影响很大。图6为推冲器的推力对侧推火箭点火时纵向分离距离影响情况。为了防止分离体与喷管碰撞,需要分离面纵向距离大于0.5 m,同时为了防止底罩撞击发射筒,要求底罩距离小于2.0 m,并且推力过大则会导致冲击过大,故可在3~16 kN范围内选择。综合以上要求,可将推冲器推力设定为11 kN,这种配置下当侧推火箭启动时,分离面之间的纵向距离为1.5 m,符合要求。

图6 推冲器对分离体相对距离影响
侧推火箭启动后,将底罩推离导弹的中轴线,在分离开始后的0.7 s导弹主发动机启动,此刻要求主发动机启动时底罩与导弹中轴线的距离应大于1.5 m。由图7可知需要安装6 k N以上推力侧推火箭可达到要求。由于考虑到逆风状态,需要留出安全余量,同时侧推火箭推力过大对底罩姿态影响也越大,故将侧推火箭推力设定为10 k N。此刻底罩横移量为2.6 m,符合要求。
侧推火箭推力确定后,其关机时间对底罩落地位置影响很大,由图8可知,随着关机时间的延迟,底罩落点距离变大,同时侧推火箭的体积和装药量也会变大。为了防止底罩撞击地面设备和人员,要求落点距离不小于10 m,图中关机时间均符合要求,为了给逆风留出余量,同时减小侧推火箭体积,取关机时间为0.8 s,这种状态下底罩落地点距离发射筒约为40 m。

图7 侧推火箭推力对底罩质心横移影响
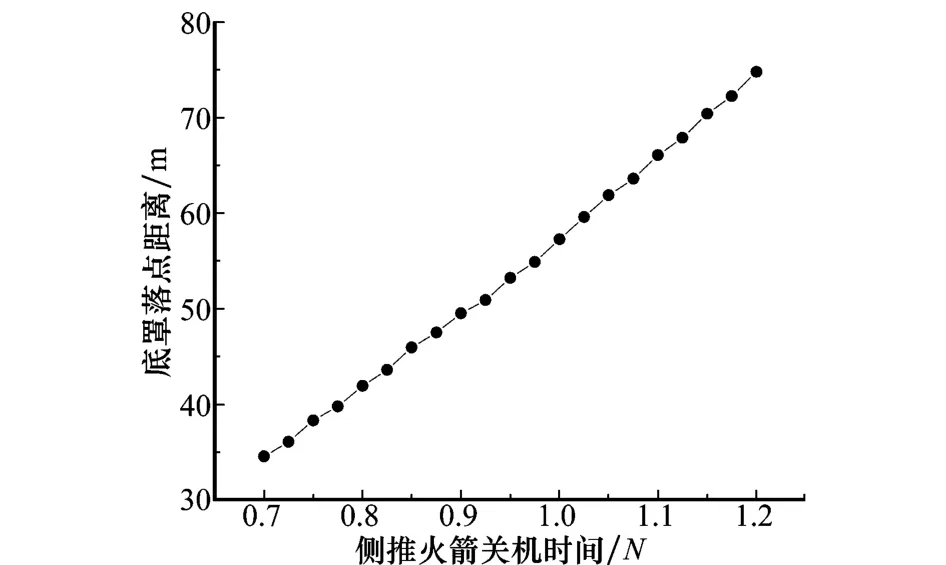
图8 侧推火箭关机时间对落点影响
综合以上研究,确定推冲器推力为11 k N,侧推火箭推力为10 k N,工作时间为0.3~0.8 s。在底罩分离完全逆风状态下,设定风速为12 m/s,在这种情况下底罩的运动情况如图9所示。主发动机开机时底罩横移量为2.01 m,底罩落地时总的横移量为21.94 m,满足设计要求。

图9 逆风状态下底罩横向运动情况
4.2 多因素分离研究
抛罩过程中,底罩受到多种偏差因素的影响,由于安装制造的误差,底罩的质心位置会出现一定的偏移量,侧推火箭的推力方向存在偏差,推冲器和侧推火箭推力有偏差,特别是风对底罩分离和下落过程影响很大。在打靶仿真过程中为了减少计算量,风向角只考虑90°~270°范围内,也就是逆风和侧风情况,因为顺风会把底罩吹的更远,不必考虑顺风情况。
根据分离过程中偏差范围和偏差分布形式,配置分离打靶仿真过程所需参数的上下限,进行多次随机打靶仿真实验,并将结果提交给后处理分析系统进行分析处理。部分打靶参数配置表如表1所示。
表1 部分参数配置表
综合考虑以上多种偏差干扰因素后,选取合理的分离方案和偏差范围进行1 000次蒙特卡罗打靶计算,得到底罩在主发动机开机时刻的横向位移分布图,如图10所示,黑色点为质心位置,由于受逆风等影响,质心最近距离位于距导弹中轴线1.8 m以外,同时由于侧风影响,在惯性坐标系Z方向底罩质心散布在±0.6 m范围内。
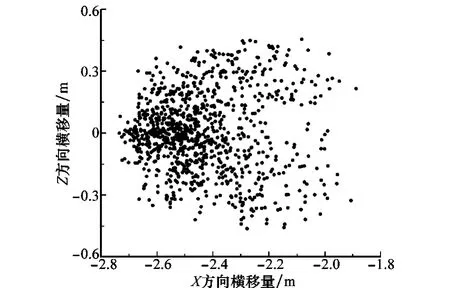
图10 底罩横移位置分布图
在多种因素影响下底罩落点位置分布如图11所示。在逆风影响下落点最近离发射筒为20 m,在安全范围内,Z轴方向落点位于±30 m范围内。
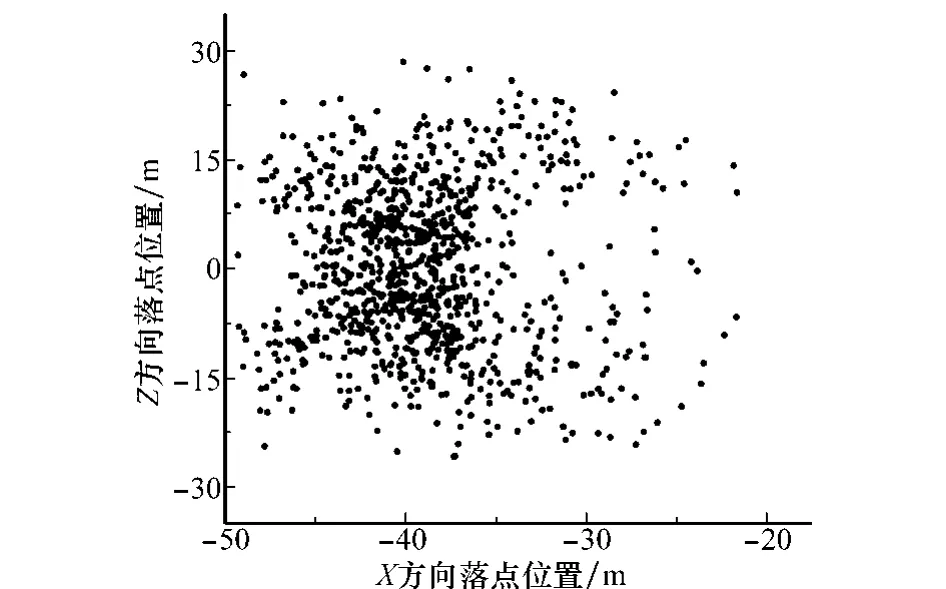
图11 底罩落点位置分布图
通过打靶计算,得到了主发动机点火时底罩质心横移和底罩落点位置的分布范围均在要求范围内,说明了分离方案是可行的,分离参数设置是合理的。
5 结 论
分离过程的动力学分析和分离后各自的运动过程研究是分离方案研制中的一个重要组成部分,关键是建立合理的理论数学模型。本文建立底罩分离过程数学模型和分离受力模型,对推冲器推力,侧推火箭推力和工作时间设计了合理的参数值,能够满足分离方案要求。
最后通过对底罩分离后运动轨迹的分析,考虑多种偏差对分离过程的影响,进行多次随机打靶仿真,得到了主发动机点火时底罩横移范围和底罩的落区范围。
本文采用的研究方案和开发仿真软件可以用于其他分离体的落区预测,可以帮助科研人员确定底罩落区范围,进行相关设备的防护工作。
[1]H ou S M.Missile design and test[M].Beij ing:China Astronautic Publishing H ouse,2009:224-230.(侯世明.导弹总体设计与试验[M].北京:中国宇航出版社,2009:224-230.)
[2]Singaravelu J,Jeyaku mar D,Nageswara R B.Taguchi’s approach for reliability and safety assessments in the stage separation process of a multistage launch vehicle[J].Reliability Engineering&System Safety,2009,94(10):1526-1541.
[3]Zhu X,Li H,Yu T,et al.Research on reliability analysis for low-altitude and high-speed payload fairing separation[C]∥Proc.of the International Conference on Quality,Reliability,Risk,Maintenance,and Safety Engineering,2013:90-94.
[4]Oh C S,Sun B C,Park Y K,et al.Payload fairing separation analysis using constraint force equation[C]∥Proc.of the International Conference on Control,Automation and Systems,2010:1134-1138.
[5]Luo Q,Zhang W,Li W.Simulation research of a miniature missile with Monte-Carlo method[J].Flight Dynamics,2013,1 (3):265-268.(罗俏,张伟,李伟.微型导弹蒙特卡罗打靶仿真研究[J].飞行力学,2013,1(3):265-268.)
[6]Pamadi B N,Tartabini P V,Toniolo M D,et al.A pplication of constraint force equation methodology for launch vehicle stage separation[J].Journal of Spacecraft and Rockets,2013,50 (1):191-205.
[7]Gusman M R,Barad M F.Aerodynamic database generation for SR B separation from a heavy lift launch vehicle[C]∥Proc.of the 29th AIA A Applied Aerodynamics Conference,2011:1-10.
[8]Jia R Y,Jiang Z Y,Zhang WH.Simulation of off-no minal parameters disturbance of hypersonic vehicle stage separation[J]. Journalof Rocket Technology,2012,35(5):578-582.(贾如岩,江振宇,张为华.高超声速飞行器级间分离偏差干扰仿真[J].固体火箭技术,2012,35(5):578-582.)
[9]H ua N,Yan J.A new trail cover separation concept and simulation of separation process[J].Missiles and Space Vehicles,2005,34(2):4-8.(华楠,阎君.新型尾罩分离方案及分离过程的仿真[J].导弹与航天运载技术,2005,34(2):4-8.)
[10]Cao R,Yang R,Zhao X Q,et al.A n arrested trail cover separation technology[J].Missiles and Space Vehicles,2013,42 (3):12-14.(晁锐,杨蓉,赵新强,等.一种滞留式尾罩分离技术[J].导弹与航天运载技术,2013,42(3):12-14.)
[11]Roshanian J,Talebi M.M onte Carlo sim ulation of stage separation dynamics of a multistage launch vehicle[J].A pplid M athematics and Mechanics,2008,29(11):1411-1426.
[12]W ang H,You X C,Lin S,et al.N u merical sim ulation of rocket aft do me separation[J].Missiles and Space Vehicles,2011,40(5):15-19.(王恒,由小川,林崧,等,火箭尾罩导向段分离仿真分析[J].导弹与航天运载技术,2011,40(5):15-19.)
[13]Jia R Y,W ang T,Jiang Z Y,et al.U ncertainty analysis of the rocket trailcover separation[J].Journalof National University of Defense Technology,2014,36(6):88-92.(贾如岩,王涛,江振宇,等.导弹尾罩分离运动不确定性分析[J].国防科技大学学报,2014,36(6):88-92.)
[14]Zhu X C,Li HY,Y u T X,et al.Research status and prospects for low-altitude and high-speed fairing separation technique[J].Journalof Solid Rocket Technology,2014,37(1):12-17.(朱学昌,李浩远,喻天翔,等.低空高速飞行器整流罩分离技术研究现状和展望[J].固体火箭技术,2014,37(1):12-17.)
[15]Li H T,Wang X G,Zhao Y.Design and development of simulation software for two-body separation calculation considering complicated factors[J].Journal of System Simulation,2013,25(12):2851-2859.(李慧通,王旭刚,赵阳.考虑复杂因素的两体分离仿真软件设计[J].系统仿真学报,2013,25(12):2851-2859.)
Separation dynamics modeling and simulation for missile trail cover
LI Hui-tong,Z H A O Yang,TIA N Hao,H U A N G Yi-xin
(School of Astronautics,Harbin Institute of Technology,Harbin 150001,China)
In the process of missile cold launch,trail cover installation is needed to protect the first-stage engine.After launch,the trail cover has to be separated from missile,so it is very important to avoid it fro m collision with any equipment on the ground.A scheme combining longitudinal separation with lateralfling is described,in which the pusheris used aslongitudinal separation energy and sol id rocket aslateral moving energy.In the process of separation,the missile trailcoveris affected by multiple uncertain factors.The kinetics and kinematics models of trail cover separation are established considering sol id rocket,pusher,air negative pressure,wind effects,etc. The effect of related parameters on the separation process is obtained,and the design parameters of the separation is determined.Finally,the lateral movement and landing range is obtained with the Monte-Carlo method.
separation;trail cover;Monte-Carlo method;simulation
V 41
A
10.3969/j.issn.1001-506 X.2016.03.32
1001-506 X(2016)03-0685-07
2015-04-14;
2015-09-10;网络优先出版日期:2015-09-28。
网络优先出版地址:http://w w w.cnki.net/kcms/detail/11.2422.T N.20150928.1036.008.html
李慧通(1988-),男,博士研究生,主要研究方向为飞行器仿真、多体动力学。
E-mail:lihuitongyx@126.com
赵 阳(1968-),男,教授,博士研究生导师,主要研究方向为飞行器仿真、振动与冲击。
E-mail:yangzhao@hit.edu.cn
田 浩(1968-),男,副教授,硕士,主要研究方向为飞行器仿真、柔体动力学。
E-mail:dongda@hit.edu.cn
黄意新(1987-),男,博士研究生,主要研究方向为航天器机构动力学、线缆动力学。
E-mail:huangyixinde@hit.edu.cn