某自行高炮浮动参数监测系统的设计与实现
2016-09-20孙致远殷军辉
孙致远,郑 坚,熊 超,殷军辉
(军械工程学院,河北 石家庄 050003)
某自行高炮浮动参数监测系统的设计与实现
孙致远,郑坚,熊超,殷军辉
(军械工程学院,河北 石家庄050003)
为了能够实时掌握自行高炮自动机性能,提高装备的可靠性,利用无线传感器网络技术,设计并建立了自行高炮浮动参数监测系统。该监测系统利用磁致伸缩位移传感器,实现了后坐位移的精确测量;设计了一种具有高速采集和片上处理功能的无线传感器网络节点,实现了数据的采集、储存与无线传输;开发了上位机软件,能够根据回传数据,完成后坐曲线的显示和浮动参数的自动提取。实弹测试试验表明,该监测系统能够基本满足自行高炮浮动参数在线监测的要求。
浮动参数;状态监测;位移传感器;无线传感器网络
自动机是自行高炮火力系统重要的组成部分之一,直接实现弹丸的快速连续击发。在恶劣的使用环境下,随着射弹次数的增多,其内部各单元必然会出现一定程度的损伤和老化,当其内部机构性能退化到达一定程度或损伤积累到一定量时,会直接影响到任务的完成,甚至会对装备及人员造成巨大危害。
对后坐曲线的精确测量及浮动参数的准确提取是掌握自动机工况性能及健康状态的重要手段之一。文献[1]利用人工后坐原理,通过PXI采集系统测量得到坦克火炮后坐曲线;文献[2]利用拉线式位移传感器,通过数据采集及调理,实现坦克火炮后坐位移的测量,但自行高炮与坦克火炮相比,射击频率高,后坐位移小,要求测试系统具有较高的测试精度和响应频率;文献[3]利用磁致伸缩传感器,通过单片机完成高炮浮动位移的采集,但在其数据传输过程中依旧使用有线传输,灵活性较差,受装备动作影响较大。这些测试方法在测试自动机后坐曲线时,往往需要在特定的试验条件下,利用较多测试及分析设备进行测量,操作程序复杂,测量效率低且测试信息实效性差,无法为正在执行作战或训练任务的装备提供有效信息。
为了能够及时获取自行高炮浮动参数、掌握火力系统工作状态,笔者结合无线传感器网络(wireless sensor networks, WSNs)技术[4],设计并建立自行高炮浮动参数在线监测系统,实现了对自行高炮射击后坐曲线的在线监测及浮动参数的自动提取,为自动机的状态评估及故障诊断提供重要数据支持,为装备的可靠运行提供重要保障。
1 监测系统组成及工作原理
1.1磁致伸缩位移传感器
自行高炮浮动参数的测试要求传感器具有较高的精度、响应频率及具有较强的抗冲击、抗振动性能。为此本系统选用磁致伸缩位移传感器。磁致伸缩位移传感器主要由波导管、磁性滑块和测量头组成,利用磁致伸缩原理,通过两个磁场相交产生一个应变脉冲信号准确得到位移信息。和传统的位移传感器相比,磁致伸缩位移传感器具有以下优势[5]:
1)传感器将位移量转化为发射与返回脉冲间的时间间隔,测量精度高达0.002%FS。
2)传感器非接触测量的特性能够保证在准确测量出炮箱后坐位移的同时不对机构运动造成影响。
3)传感器内部转换电路被密封在不锈钢腔体内部,与机构固定端相连接,使其能够尽量避免被自动机的冲击和高温所影响。
4)其标准的输出信号便于直接被网络采集节点所采集,提高系统的自动化程度。
传感器相关参数如表1所示。
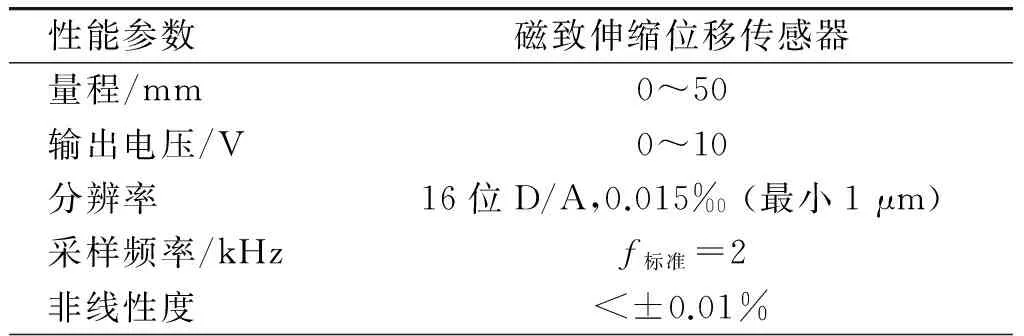
表1 磁致伸缩位移传感器性能参数
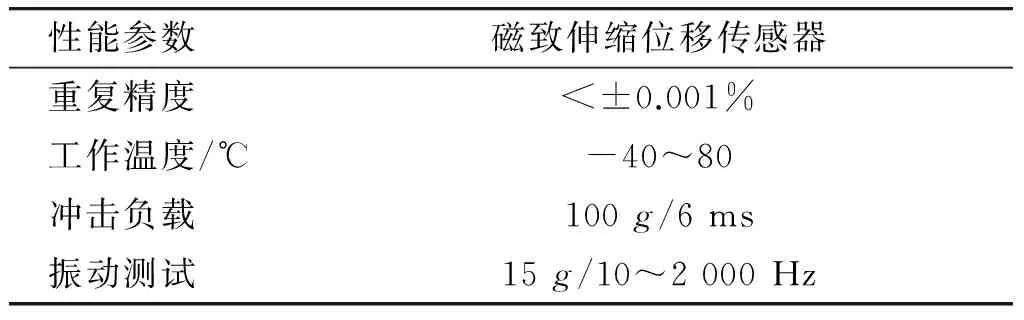
续表1 磁致伸缩位移传感器性能参数
位移传感器的供电单元采用镍氢电池组,体积小,方便安装,能够为传感器提供24 V稳定直流电压,满足其长时间工作的需要。
1.2无线传感器网络设计与组成
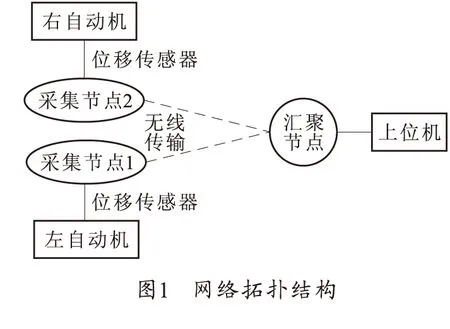
本系统利用无线传感器网络技术,构建起无线、分布式的状态信号采集网络。网络由一个汇聚(Sink)节点和多个采集节点组成,汇聚节点与监控上位机相连,负责完成整个网络的建立、网络参数的设置、网络中采集节点的管理和控制;采集节点与前端传感器直接相连,搜索加入无线网络后受汇聚节点控制,主要负责状态信号的采集、处理与传输。系统监测的主要内容为左、右自动机的后坐位移,网络中采集节点较少,数据传输距离在10 m之内,覆盖面积较小,因此选择单跳星型的网络拓扑结构,如图1所示。这种网络结构简单,易于组网,鲁棒性强,满足小规模网络高性能数据采集的要求[6]。
1.2.1采集节点
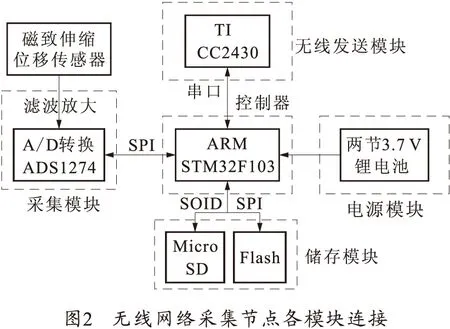
采集节点采用双核心设计[7],无线射频芯片CC2430主要负责网络组建、节点管理及命令与数据的传输任务;ARM微控制器STM32F103主要负责完成对传感器输出电压信号的采集、储存及处理。节点双核心独立工作,能够有效避免多任务调度问题,高效完成信号采集、模数转换、运算储存及无线发送等功能,有效提高节点效率。
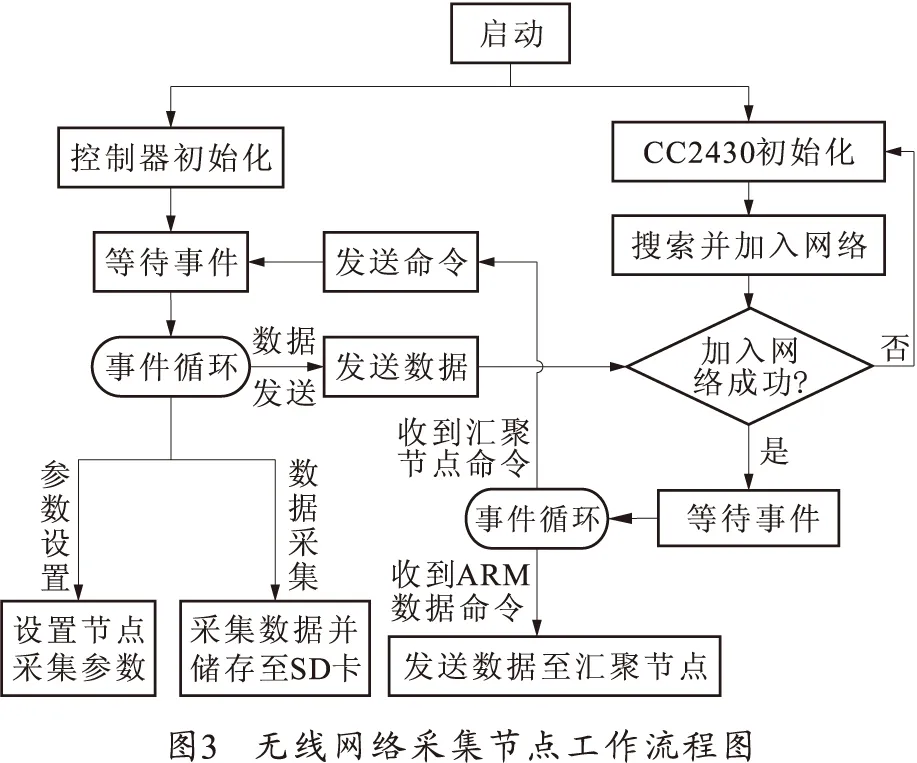
采集节点主要由采集模块、控制模块、无线通信模块、储存模块和电源模块组成。采集模块主要利用TI公司推出的24位模数转换器ADS1274,通过控制器内部的定时器实现四通道电压信号的精确同步采集,具有AC和DC两种耦合模式,是节点进行状态数据采集的最终执行单元;采集到的数据通过DMA模式SPI接口与控制模块通信;储存模块中利用Micro-SD储存卡,在控制器控制下,按照乒乓缓存机制,将采集到的数据可靠储存;控制模块由ST公司推出的基于Cortex-M3内核的STM32F103微控制器构成,芯片集成了定时器、ADC、SPI、UART等多种功能,且具有较低功耗。无线通信模块主要由CC2430构成,它是一种基于IEEE 802.15.4和Zigbee标准的片上系统解决方案,具有良好的RF收发器性能,其内部包含一个增强型工业标准的8位8051微控制器内核,使用2.4GHz波段,传输速率为250 kb/s,传输距离为10~75 m,具有封装体积小、网络架构简单、低成本、低功耗及抗干扰能力强等优点。无线通信模块除完成指令的发送与接收外,还负责将采集数据信息及时回传。控制模块与无线通信模块通过GPIO完成同步,通过串口实现通信;电源模块包含两节3.7 V锂电池,具有2 400 mA·h容量,满足采集节点各模块供电需求,保证采集节点的可持续性工作。采集节点各模块连接及工作流程如图2、图3所示。
1.2.2上位机软件
汇聚节点主要由通信模块组成,与上位机通过USB接口相连,完成网络的组建与网络通信。上位机软件运行在Windows操作系统上,运用面向对象的编程技术和Visual Studio开发工具,采用C#编程语言编写,结合模块化设计思想,基于.NET框架进行开发。监测系统软件的主要功能是管理无线传感器网络,包括网络参数的配置、网络的组建、节点状态的监测、节点功能的设置、采集控制、采集数据显示、数据储存与数据分析等功能。
2 应用实例
2.1后坐曲线的监测
位移传感器分为基座与活动磁铁两部分,通过夹具安装于装备上,安装时应遵循以下原则:
1)基座与装备静止部位紧密相连,且连接时确保在机构运行时不发生松动。
2)基座尽量避免受到强烈冲击、振动和高温等恶劣条件影响。
3)滑动磁铁与火力系统浮动部分紧密相连,在运动时避免与其他机构发生接触,影响机构运动。
4)滑块受力尽量与运动方向一致,减少后坐时与基座导轨间的相互作用。
5)夹具应具有一定的强度,避免在运动时出现变形。
位移传感器与火力系统自动机连接如图4所示。

结合火力系统结构及工作时各机构的运动情况,将传感器基座固定于浮动机与前悬置连接的圆柱部位上,滑动磁铁通过2个万向节和螺杆与筒形夹具相连接,筒形夹具紧紧抱死身管,保证身管后坐时不发生相对运动,滑动磁铁与基座导轨嵌合并能够自由滑动,注意嵌合时应将滑动磁铁的滑动范围置于基座的有效测量范围之内,使整个运动过程能够被准确采集。在安装时尽量使导杆指向与身管后坐方向一致,保证传感器工作的安全稳定。
网络采集节点固定在炮塔上方平面位置,采集位移传感器的输出信号,下部加垫泡沫垫用以减震。汇聚节点与计算机相连,位于炮塔上方炮舱入口处。
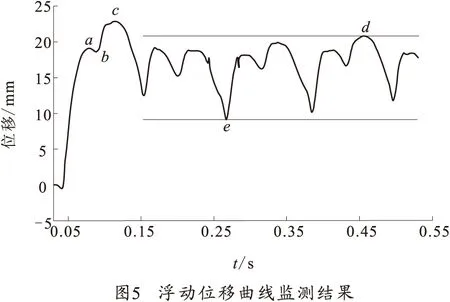
进行实弹射击试验时,监测条件为5连发射击,射角水平,采样频率为10 kHz,测得浮动位移曲线如图5所示。在第一发炮弹射击时,自动机未完全实现浮动,因此首发后坐距离一般在整个射击过程中最大,a、b、c分别为首发射击过程中自动机的一次后坐极值、二次后坐起始点及二次后坐极值。从第2发炮弹开始,自动机进入浮动射击状态,后坐位移基本保持在一定范围之内,即在d、e间往复运动。
2.2浮动参数的提取
常用的浮动参数有首发后坐极值、一次后坐平均值、二次后坐平均、击发点位置平均值、后坐时长、复进时长及射击频率等。可以看出,所有浮动参数都是由后坐曲线中的极值点直接或经过计算确定的,因此,浮动参数的提取可以看做是后坐曲线中波峰和波谷的自动识别。
识别浮动曲线中有效波峰与波谷的方法如下:首先确定数据序列X中数据点的比较范围ε,在此选择a与b之间的数据点个数为ε值;对于X中的任意一个数据点xi,选择[xi-ε,xi+ε]为相邻比较序列,若xi为相邻比较序列中的最大值或最小值,则可以确定xi为整个浮动曲线的一个有效波峰或波谷;对选择出的波峰值及波谷值进行筛选、计算等处理,可以得到自行高炮的浮动参数。
对试验所得后坐位移曲线进行参数提取,得到相关浮动参数如表2所示。
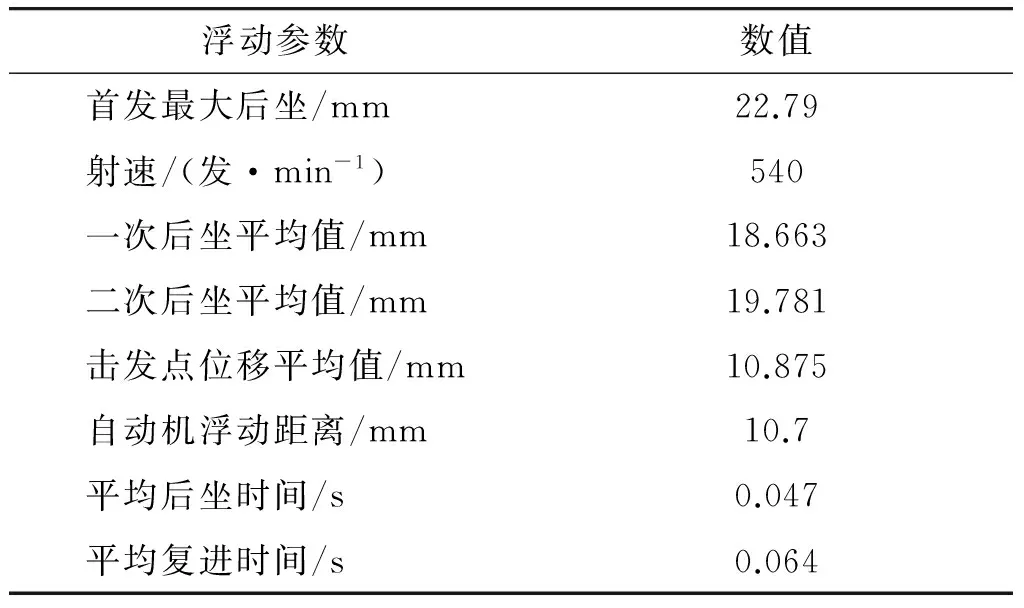
表2 浮动参数测量结果
通过对浮动曲线的测量和对浮动参数的分析可以看出,自行高炮射速在450~610 发/min之间,最大后坐位移在30 mm之内,浮动射击位移在6~12 mm之间,符合各指标要求;且从后坐位移曲线上能够看出,炮箱在运动过程中无明显卡滞现象,整个自动机状态性能良好。
在整个采集过程中,传感器及网络节点的安装对炮塔的转动及射击基本不造成影响。对于包含一个单通道采集节点的无线传感器网络来说,以10 kHz的采样频率,对变化的位移量采集7 s,采集节点将数据存入节点SD卡,大约19 s后能够完成数据向上位机的无线传输。与传统的检测方法相比,利用无线传感器网络进行浮动参数监测具有较高的监测效率,且在设备及线缆布置上具有极高的灵活性。
3 结论
笔者综合利用传感器技术及无线网络技术,设计并建立了自行高炮浮动参数监测系统。从实际应用效果及监测数据来看,无线传感器网络基本实现了自动机后坐位移的准确采集和数据的可靠传输,上位机监测实现了位移曲线的显示、储存及浮动参数的有效提取,监测系统基本达到了对自行高炮浮动参数在线监测的要求。
References)
[1]张金忠, 苏忠亭, 赵富全, 等. 坦克火炮反后坐装置在线检测方法研究[J]. 火炮发射与控制学报, 2010(2):90-93.
ZHANG Jinzhong, SU Zhongting, ZHAO Fuquan, et al. Reaserch on on-line inspection method of tank gun recoil mechanism[J]. Journal of Gun Launch & Control, 2010(2):90-93. (in Chinese)
[2]钟孟春, 肖自强, 李华, 等. 坦克反后坐装置技术状态监测系统设计与实现[J]. 计算机测量与控制, 2013, 21(5): 1243-1245.
ZHONG Mengchun,XIAO Ziqiang, LI Hua,et al. Design and implement of tank recoil mechanism’s technical condition monitoring system[J]. Computer Measurement & Control, 2013, 21(5):1243-1245.(in Chinese)
[3]张振友, 赵勇, 杨岐子. 基于磁致伸缩位移传感器的高炮浮动参数测试系统[J]. 火炮发射与控制学报, 2008 (2): 71-74.
ZHANG Zhenyou, ZHAO Yong, YANG Qizi. A gun floa-ting parameter test system based on magnetostrictive displacement sensor[J]. Journal of Gun Launch & Control,2008(2):71-74.(in Chinese)
[4]汤宝平, 黄庆卿, 邓蕾, 等. 机械设备状态监测无线传感器网络研究进展[J]. 振动,测试与诊断, 2014, 34(1):1-7.
TANG Baoping, HUANG Qingqing, DENG Lei, et al. Research progress and challenges of wireless sensor networks for machinery equipment condition monitoring[J].Journal of Vibration,Measurement & Diagnosis,2014, 34(1):1-7.(in Chinese)
[5]李怀洲, 孙海燕, 罗祖顺, 等. 磁致伸缩位移传感器的研究与应用[J]. 电气自动化, 2005, 27(5):58-59.
LI Huaizhou, SUN Haiyan, LUO Zushun,et al.Magnetostrictive torsional displacement sensor research and appalication[J]. Electrical Automation, 2005, 27(5):58-59.(in Chinese)
[6]汤宝平, 贺超, 曹小佳. 面向机械振动监测的无线传感器网络结构[J]. 振动,测试与诊断, 2010, 30(4):357-361.
TANG Baoping, HE Chao, CAO Xiaojia. Topology of wireless sensor networks for mechanical vibration monitoring[J]. Journal of Vibration, Measurement & Diagnosis, 2010, 30(4):357-361.(in Chinese)
[7]黄庆卿, 汤宝平, 邓蕾, 等. 机械振动无线传感器网络跨层同步采集方法[J]. 仪器仪表学报, 2014,35(5):1143-1148.
HUANG Qingqing, TANG Baoping, DENG Lei, et al. Synchronous acquisition method based on cross-layer design for machine vibration wireless sensor networks[J].Chinese Journal of Scientific Instrument, 2014,35(5):1143-1148.(in Chinese)
Design and Implementation of a Certain Self-propelled Anti-aircraft Gun Floating Parameter Monitoring System
SUN Zhiyuan, ZHENG Jian, XIONG Chao, YIN Junhui
(Ordnance Engineering College, Shijiazhuang050003, Hebei, China)
For the purpose of keeping track of the performance of the auto-mechanism of self-propelled anti-aircraft gun and improve its reliability, the floating parameter monitoring system of self-propelled anti-aircraft gun was designed and established based on the wireless sensor networks (WSNs) technology. In the monitoring system, the magnetostriction displacement sensors were used to successfully and accurately pick up the recoil displacement. A WSN node with high speed acquisition and on-chip processing was designed to realize the data collection, storage and wireless transmission. The host compu-ter software was designed to achieve the recoil curve display and the floating parameter automation extraction according to the data received. The firing test shows that the system can basically satisfy the floating parameter on-line monitoring requirement.
floating parameter;working condition monitoring; displacement sensor; wireless sensor networks
10.19323/j.issn.1673-6524.2016.02.013
2015-06-10
孙致远(1990—),男,硕士研究生,主要从事武器性能检测与故障诊断技术研究。E-mail:sunzhiyuandll@163.com
TJ206
A
1673-6524(2016)02-0062-05
