浅谈控制机器人切割工序纵梁切割粘连不断措施
2016-09-19孙云生杨红莉高朋陕西重型汽车有限公司陕西西安710200
孙云生,杨红莉,高朋(陕西重型汽车有限公司,陕西 西安 710200)
浅谈控制机器人切割工序纵梁切割粘连不断措施
孙云生,杨红莉,高朋
(陕西重型汽车有限公司,陕西 西安 710200)
机器人切割工序在切割车架纵梁外形时,容易产生切割后粘连不断现象,返修费时费力。文章从各个角度展开分析,制定了有效的解决措施,通过改进原有机器人切割机检测头密封装置,增加纵梁压紧装置等措施杜绝了纵梁外形切割不断现象发生。
重型卡车纵梁;机器人等离子切割机;切割粘连不断
10.16638/j.cnki.1671-7988.2016.08.078
CLC NO.: U466Document Code: AArticle ID: 1671-7988(2016)08-232-03
引言
纵梁的加工大体可以分为冲孔、压型、清洗烘干抛丸、切割、合梁及透孔五个工序,切割工序主要承担纵梁总成内梁及外梁外形的加工。
1、加工现状
机器人切割工序做为纵梁加工中必不可少的环节,产品质量一直存在切割后粘连不断现象(见图1),切割后仍需人工返修,费时费力,解决切割粘连不断现象,迫在眉睫。
2、原因分析
等离子切割原理为利用等离子弧高速、高温和高能的等离子气流加热并熔化金属,再借助某种气体介质排除熔化了的金属而形成割口。切割质量与板材厚度、切割电流、气源压力、切割速度、切割嘴是否及时更换及检测头是否有数值息息相关。切割电流大小和纵梁厚度有关,切割电流随割件厚度增加而增大;切割速度取决于割件厚度、切割电流,切割速度快慢严重影响切口质量,速度过快,等离子弧来不及熔化金属,容易产生粘连不断,一般相同厚度板材切割速度增加,切割电流也应相应增加;而切割嘴距离工件距离设定也十分重要,切割嘴距离工件距离过远,容易产生上表面粗糙、割瘤甚至切割不透,而过近则工件背面容易产生飞溅、割瘤甚至撞枪;我们从人、机、料和法四个方面进行分析、讨论并现场跟踪测量,最终确定了三个主要原因为导致机器人切割机切不断的原因,分别是检测头侵蚀、纵梁来料弯曲度过大及切割嘴距离工件距离过远,具体确认过程如下所述。
2.1检测头侵蚀
检测头是机器人切割机在执行切割之前检测纵梁表面平面度的重要部分,我们查看检测头密封装置前端及后端密封情况,具体见图2,图3,发现密封情况较差,检测头容易侵蚀,常出现检测头检测无值不执行切割现象。
2.2纵梁来料翘曲度过大
因机器人切割机执行切割程序时是以首件来料质量情况进行判读分析并切割,因而对来料弯曲度是否满足工艺标准范围,要求严格,我们对4个批次共计100根切割工序纵梁的来料情况进行抽检,共抽查20根,从前往后1000范围内其翘曲度统计如下表1,从图表中我们可以看出纵梁来料不符合标准。

表1 来料翘曲度统计表
2.3切割嘴距离工件距离过远
机器人切割机在执行切割任务以前,首先要执行检测程序以检测纵梁表面的平面度,为切割嘴距离切割面距离提供依据,我们对纵梁未切割断部分进行分析,发现当切割距离大于600mm时,切割嘴距离纵梁表面距离超出机器人切割机割嘴有效切割距离,容易产生切割不断现象,具体统计表见表2。
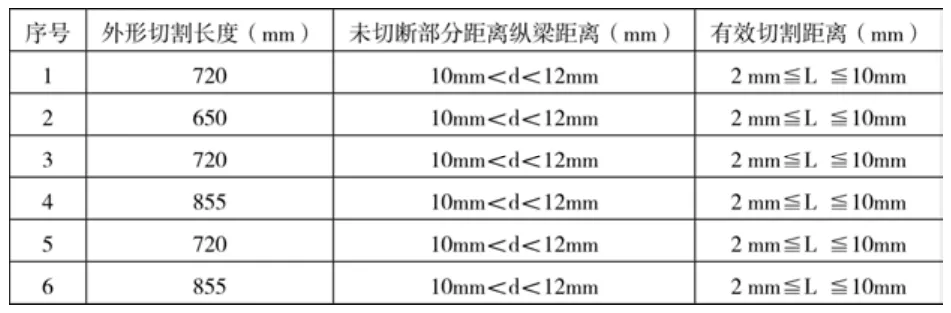
表2
3、对策制定及实施
1.对策制定
针对得出的3方面原因,我们分别制定了相应措施进行解决,如表7所示。
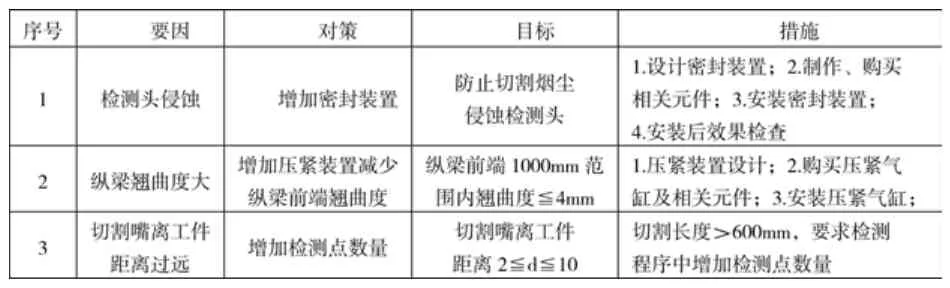
表3 对策实施计划表
2.对策实施
对策实施1,增加密封装置,首先我们设计了密封装置的结构,见图4,并联系相关厂家进行加工,密封装置在机器人切割机工作时,密封挡板可以气动打开不影响检测头检测,当不工作时密封挡板关闭,可以防止检测头受到切割飞溅及灰尘侵蚀,安装后的密封装置见图5。检测头安装新密封装置后,防止了灰尘及飞溅侵蚀检测头,连续3个月均无发现检测头检测无值现象,因此该项措施有效。
对策实施2,增加压紧装置减少纵梁前端翘曲度,同样我们先选择压紧汽缸,并设计了压紧装置的结构,具体见图6,并进行安装,安装后的压紧装置见图7,压紧装置增加后,我们现场测量了共计12根前端翘曲度不符合要求纵梁,压紧后纵梁前端1000范围内的翘曲度,我们发现压紧后前端翘曲度满足了我们的要求,因此该项措施有效。
对策实施3,增加检测点数量,理想的切割平面,机器人切割机在切割直线时,根据两点确定一条直线,两个检测点便可以进行有效切割,但是实际加工中,由受纵梁表面不平,翘曲等影响,容易产生切割嘴距离工件距离过远切割不透或过近切割灭弧现象,因而我们的措施是当切割距离大于600时,在原有2个检测点基础上在增加一个检测点,防止切割头距离工件距离过远,具体原理图见图8。
4、结语
三个措施实施完成后,我们对改进后机器人切割工序所加工的不合格纵梁进行统计,再无发现纵梁切割不断粘连现象,彻底杜绝了此种现场的发生。另外,通过本次攻关研究,该工序的不合格率也由6.5%降低到2.4%,大大的节约了返修成本,同时也增强了各部门之间的沟通协作能力,质量意识有了大幅度的提升。
Simple analysis Control of beam Cutting adhesion measures In robot cutting process
Sun Yunsheng,Yang Hongli,Gao Peng
(Shaanxi Heavy-duty Automobile Company Limited,Shaanxi Xi'an 710200)
The robot cutting process in cutting Heavy-duty beam,It's easy to produce the cutting adhesion phenomenon,re work is time-consuming and laborious.The article analysis from multiple perspectives,formulate effective measures to sol ve this problem,by improving the original robot cutting machine detection head sealing device,increase rail clamping devi ce,and so on .Through a number of measures put into effect,the Heavy-dutybeamcutting continuous phenomenon has been solved.
Heavy-duty beam; Robot plasma cutting machine; Cutting adhesion
U466
A
1671-7988(2016)08-232-03
孙云生(1987-),男,就职于陕西重型汽车有限公司车架厂技术科,主要从事车架纵梁生产工艺技术。
