双曲柄五杆栽植机构运动学分析
2016-09-15何小晶孙新城陈建能童志鹏曾功俊
何小晶,孙新城,陈建能,童志鹏,曾功俊,王 川
(1.浙江理工大学机械与自动控制学院,杭州 310018;2.浙江省种植装备技术重点实验室,杭州 310018)
双曲柄五杆栽植机构运动学分析
何小晶1,2,孙新城1,2,陈建能1,2,童志鹏1,2,曾功俊1,2,王川1,2
(1.浙江理工大学机械与自动控制学院,杭州 310018;2.浙江省种植装备技术重点实验室,杭州 310018)
为了分析双曲柄五杆栽植机构的轨迹、姿态和穴口的形状、大小等作业性能,建立了双曲柄五杆栽植机构的位移、速度、加速度方程,采用Matlab编写了双曲柄五杆栽植机构运动学仿真分析软件。对该机构的若干关键参数对其作业性能的影响进行分析,关键参数包括两曲柄的长度及其初始相位差,分析结果表明:其中一曲柄的长度对栽植嘴的穴口大小及轨迹高度有显著影响;另一曲柄的长度对轨迹的高度有一定影响,但对穴口大小的影响更为明显;两曲柄的初始相位差对栽植轨迹的形状及栽植后轨迹的垂直度的影响显著,而对轨迹高度与穴口大小影响较小。根据参数分析结果得到一组较优的机构参数,相应的轨迹及运动姿态比日本井关的移栽机更好,且符合栽植作业的农艺要求。
双曲柄五杆机构;蔬菜移栽机;运动学分析;作业性能
0 引 言
随着人口的持续增长,可耕地面积的不断减少,粮食短缺问题日益凸显,利用移栽技术提高作物单产是保障粮食需求的主要方法之一[1-2]。我国对机械移栽技术的研究起步较晚,移栽作业机械化程度较低,基本依靠人工完成,栽植效率低下[3-5]。为追求更高的栽植速度及优良的仿真性能,回转式移栽机已成为当今的研究热点。然而回转式机构结构设计复杂,加工、装配难度较大,同时由于人工喂苗速度跟不上,或由于机械手高速取苗效果不可靠,使得其实际应用效果大多不及预期。本文在充分考虑结构简单及运行可靠的基础上,对双曲柄五杆栽植机构建立了数学模型,分析了关键参数的影响,并综合考虑了栽植嘴的回程轨迹、穴口的大小与形状及栽植嘴在接苗、植苗时的速度与姿态等重要指标,优选出一组机构参数,使其在作业性能理想地同时满足蔬菜移栽的农艺要求。
1 双曲柄五杆栽植机构
双曲柄五杆栽植机构的简图及初始位置如图1(a)所示,栽植嘴的左视简图如图1(b)所示。该机构由双曲柄五杆机构与鸭嘴式栽植嘴组成。输入构件为曲柄OA及曲柄DC,两曲柄沿顺时针方向同角速度匀速转动。输出构件为连杆CE,鸭嘴式栽植嘴固定在连杆CE的一端。当栽植嘴位于最高位置时(曲柄OA和连杆AB重叠共线,即图1(a)所示位置),喂苗杯底部活门张开,在重力作用下杯内钵苗落入栽植嘴中。当曲柄转过约180°时,栽植嘴到达最低位置,此时栽植嘴在凸轮及拉线的作用下张开,钵苗沿着栽植嘴壁滑入挖好的穴口中,紧接着覆土、镇压,结束一次栽植动作。
2 运动学模型的建立
本文以O点为坐标原点,水平方向为X轴,竖直方向为Y轴建立直角坐标系,如图1所示。本文所涉及的参数和含义如表1所示。

图1 双曲柄五杆栽植机构与栽植嘴简图
符号含义符号含义L0曲柄OA的长φ曲柄OA与曲柄DC的角速度(匀速顺时针)L1连杆AB的长φ1连杆AB的角速度L2连杆BC的长φ2连杆CE的角速度L3曲柄DC的长φ4连杆EF的角速度L4杆BE的长度¨φ1连杆AB的角加速度L5栽植嘴的高度¨φ2连杆CE的角加速度φ0曲柄OA的初始相位角¨φ4连杆EF的角加速度φ1连杆AB的角位移∠BEF栽植嘴与连杆CE之间的夹角φ2连杆CE的角位移θ03曲柄OA及曲柄DC的相位差φ3曲柄DC的初始相位角R栽植嘴半径φ4杆EF的角位移N移栽频率φ曲柄OA和曲柄DC的角位移S株距
2.1位移方程
A点的位移方程为:
(1)
C点的位移方程为:
(2)
根据矢量方程LOA+LAB=LOD+LDC+LCB,可以求出B点的位移方程为:
=YD+L3sin(φ3+φ)+L2sinφ2
(3)
把式(3)移项、平方而后两式相加,将φ1消去。

(4)
根据式(4)可以求出φ2,回代可得φ1。
E的位移方程为:
(5)
由φ4=π+φ2-θ,知F点的位移方程为:
(6)
2.2速度方程
对式(3)求导,可得到B点的速度方程为:

(7)
将式(7)进行化简,可得到连杆AB的角速度为:

(8)
(9)
对式(5)进行求导,可得到E点的速度方程为:
(10)
对式(6)进行求导,可得到F点的速度方程为:
(11)
2.3加速度方程
对式(7)进行求导,可得到B点的加速度方程为:

(12)

(13)
(14)
对式(10)进行求导,可求得E点的加速度方程为:
(15)
对式(11)进行求导,可求得F点的加速度方程为:
(16)
3 程序编写及参数分析
3.1仿真分析程序的编写及应用
采用Matlab2007Ra,根据所建运动学模型编写了双曲柄五杆栽植机构运动学仿真分析软件,软件界面如图2所示。该软件可根据所输入的参数对双曲柄五杆栽植机构进行运动学仿真,显示栽植嘴所挖出的穴口形状,得到其动轨迹、静轨迹、速度、加速度及栽植嘴与水平位置的夹角等的变化图线,并输出轨迹高度及所挖穴口大小的值。使用人机对话界面,通过调节各个参数值,其中包括各杆的杆长、曲柄初始相位角、D点的坐标、曲柄的角速度、株距以及栽植嘴与连杆间的角度等,求得一组能使栽植嘴的运行轨迹,植苗姿态等最为优化的参数值。

图2 双曲柄五杆栽植机构运动学仿真分析软件界面
3.2关键参数对机构特性的影响
根据文献[6-12],栽植机构的理想作业性能包括:
a)移栽机行进方向的穴口壁面应该尽可能和垄面水平线保持垂直;
b)钵苗在离开栽植嘴时栽植嘴应保持直立状态,且栽植嘴水平方向的速度尽可能的小;
c)栽植嘴的回程轨迹应该先向后向上(或竖直向上),在超过钵苗的高度后再向前向上,以防止回带或者损伤钵苗。
本文基于所建立的运动学模型并借助所编写的运动学仿真分析软件就若干关键参数对该机构特性的影响进行分析,并以理想作业性能为目标对参数进行优化。
3.3曲柄OA长度L0
当L1=134mm,L2=300mm,L3=92mm,L4=130mm,L5=170mm,XD=264mm,YD=-45mm,Φ0=35°,Φ3=25°,N=38 株/min,∠BEF=118°,S=400mm,R=45mm时,曲柄OA的长度L0与栽植点轨迹之间的关系如图3所示。由图3可知,随着曲柄OA的长度L0的增大,栽植点F的静轨迹在垂直方向逐渐变高,水平方向逐渐变窄,如图3(a)所示;栽植嘴与菜畦的垄面水平线接触的最大距离(即穴口尺寸)逐渐增大,轨迹高度增大,如图3(b)所示。故曲柄OA的长度L0对轨迹高度及穴口大小有显著影响。

图3 L0与栽植嘴轨迹之间的关系
3.4曲柄DC长度L3
当L0=145mm,L1=134mm,L2=300mm,L4=130mm,L5=170mm,XD=264mm,YD=-45mm,φ0=35°,φ3=25°,N=38株/min,∠BEF=118°,S=400mm,R=45mm时,曲柄DC的长度L3与栽植点轨迹之间的关系如图4所示。由图4可知,随着曲柄DC的长度L3的增大,栽植点F的静轨迹在垂直方向逐渐变矮,在水平方向逐渐变宽,整体趋向于“矮胖”型,穴口大小与轨迹高度随之变小。故曲柄DC的长度L3对轨迹高度及穴口大小都有影响,但对穴口大小有显著影响,对轨迹高度的影响一般。
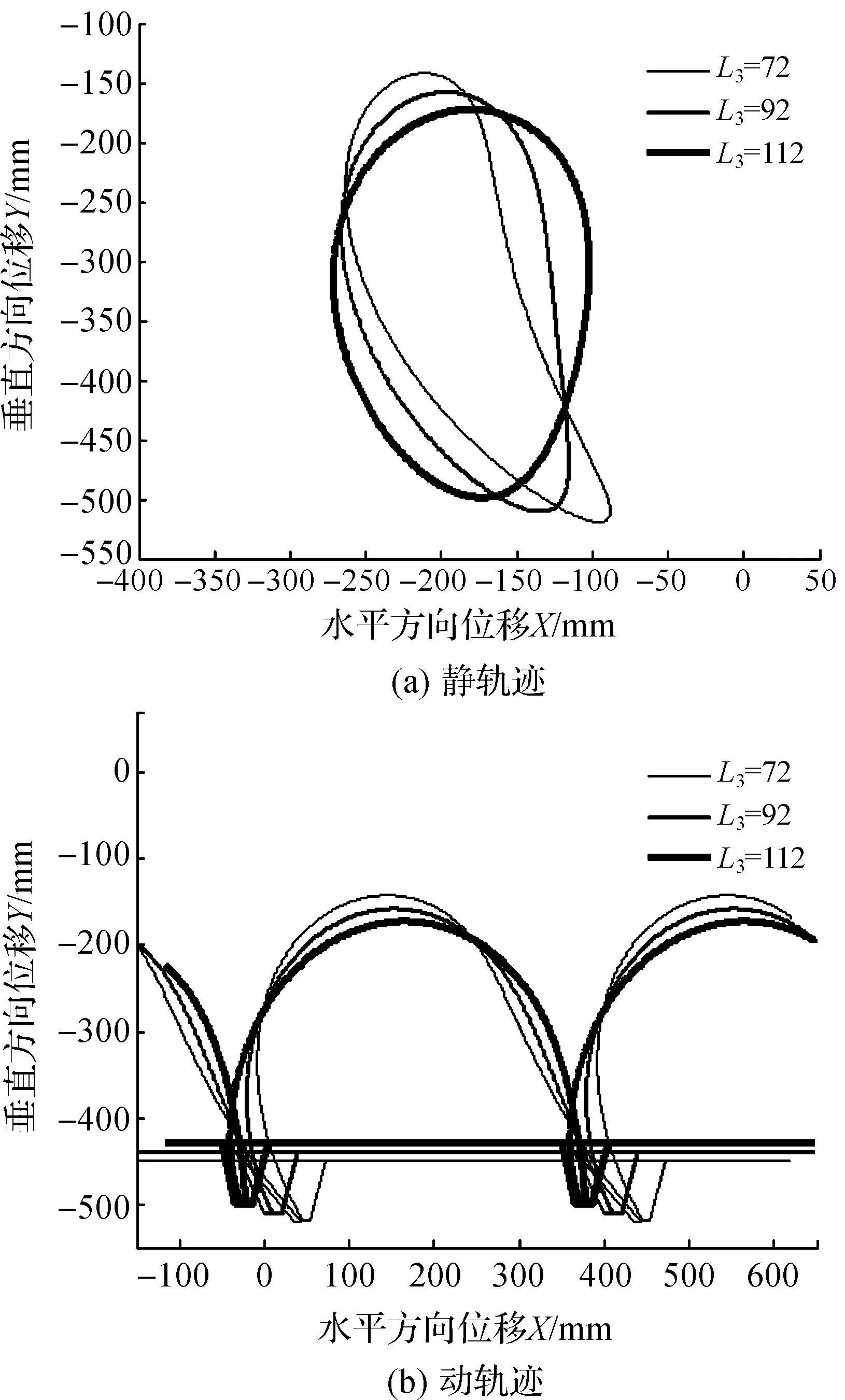
图4 L3与栽植嘴轨迹之间的关系
3.5相位差θ03
当L0=145mm,L1=134mm,L2=300mm,L3=92mm,L4=130mm,L5=170mm,XD=264mm, YD=-45mm,φ0=35°,φ3=25°,N=38株/min,∠BEF=118°,S=400,R=45时,相位差θ03与栽植嘴轨迹之间的关系如下图5所示。随着相位差θ03的增大(不改变曲柄DC的初始相位角φ3,仅增大曲柄OA的初始相位角φ0),栽植点F的轨迹形状发生了较大的变化,随着相位差的增大,栽植点的静轨迹从倾斜状态逐渐自立,垂直方向几乎不变,水平方向逐渐变窄,穴口先变小后变大。故θ03是改变栽植点F轨迹的重要参数,其对穴口大小和直立度都有一定影响。
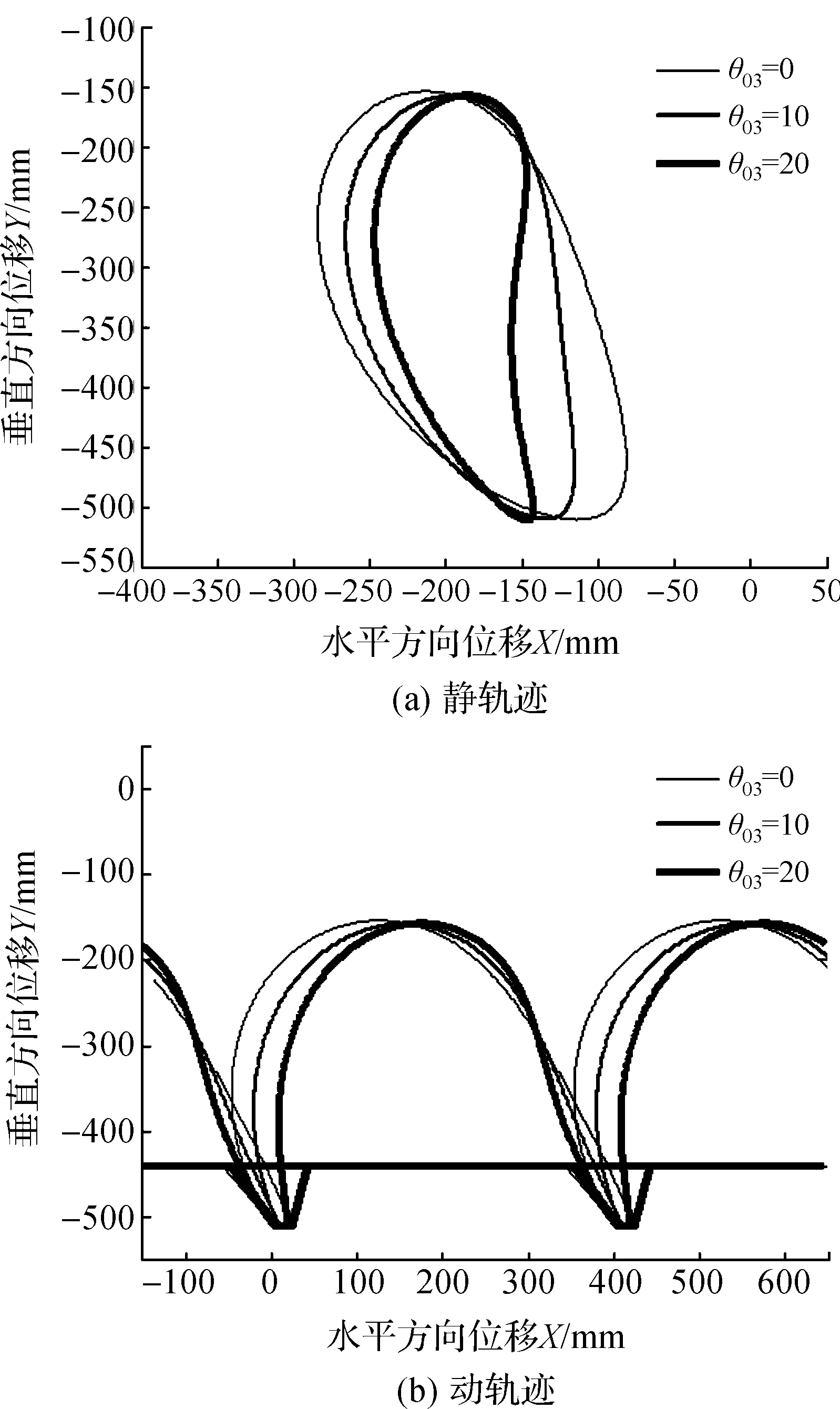
图5 θ03与栽植嘴轨迹之间的关系
4 结果分析及实例比较
4.1结果分析
取株距S=400mm,曲柄OA及曲柄DC的转速为38转/min,利用所编写的运动学仿真分析软件,通过该软件的人机对话界面,分析双曲柄五杆栽植机构的各关键参数对栽植嘴点F的速度,栽植姿态,从栽植嘴张开至其超过所植秧苗高度的过程中其轨迹的形状与所挖穴口大小等的影响,优选出得参数如下:L0=145mm,L1=134mm,L2=300mm,L3=92mm,L4=130mm,L5=170mm,XD=264mm,YD=-45mm,φ0=35°,φ3=25°,∠BEF=118°。上述参数相应的双曲柄五杆栽植机构的静轨迹及动轨迹见图6。当栽植嘴在进行栽植作业时,栽植嘴与水平面夹角近似为90°,穴口底部保持水平,穴口大小为65.9mm,轨迹高度为352.2mm。
图7为栽植点F的速度及加速度与曲柄转角的关系图,当曲柄从20°转到120°时,栽植点F的速度随之降低,当转过约120°时栽植嘴张开,钵苗在重力作用下落入穴口中,此时栽植点F的速度达到最小值为0.30m/s,该过程减轻了钵苗在植苗过程中的碰撞从而降低损伤。在植苗后,栽植嘴速度逐步加
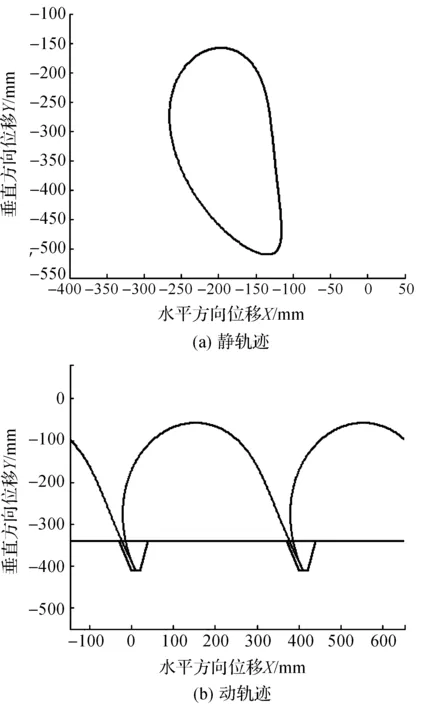
图6 栽植点F的静轨迹及动轨迹
快,以提高栽植的效率。而后紧接一减速过程,当曲柄转到约300°时,栽植嘴位于最高位置,此时栽植嘴与水平面成一定角度接苗,钵苗沿栽植嘴壁面慢慢下滑,以此减少钵苗损伤。在接苗后,栽植点F速度先增大后减小,下降到最低点时继续下一次栽植动作。由以上分析可知,该组参数能够实现良好的栽植效果,满足栽植农艺要求。
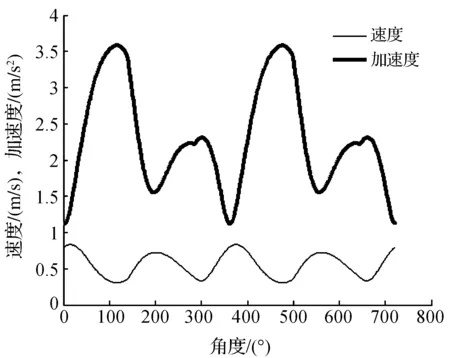
图7 栽植点F的速度及加速度
4.2实例比较
图6、图7为双曲柄五杆栽植机构的最佳动、静轨迹及其对应的速度、加速度图。目前在市场上推广的日本井关两行蔬菜移栽机的七杆式栽植机构的静轨迹、动轨迹及其对应的速度、加速度如图8和图9所示[6-10],以上两种栽植机构的相关参数列于表2中。在相关参数对比后可知,相对于七杆式栽植机构而言,双曲柄五杆栽植机构的栽植点的轨迹高度更高,穴口更大且穴口底部水平,速度、加速度及其波动量都更小。总而言之,与七杆式栽植机构相比,双曲柄五杆栽植机构,结构更为简单,作业性能更为优良,具有更好的动力学特性。

图8 七杆式栽植机构栽植点的静轨迹及动轨迹

图9 七杆式栽植机构栽植点的速度及加速度
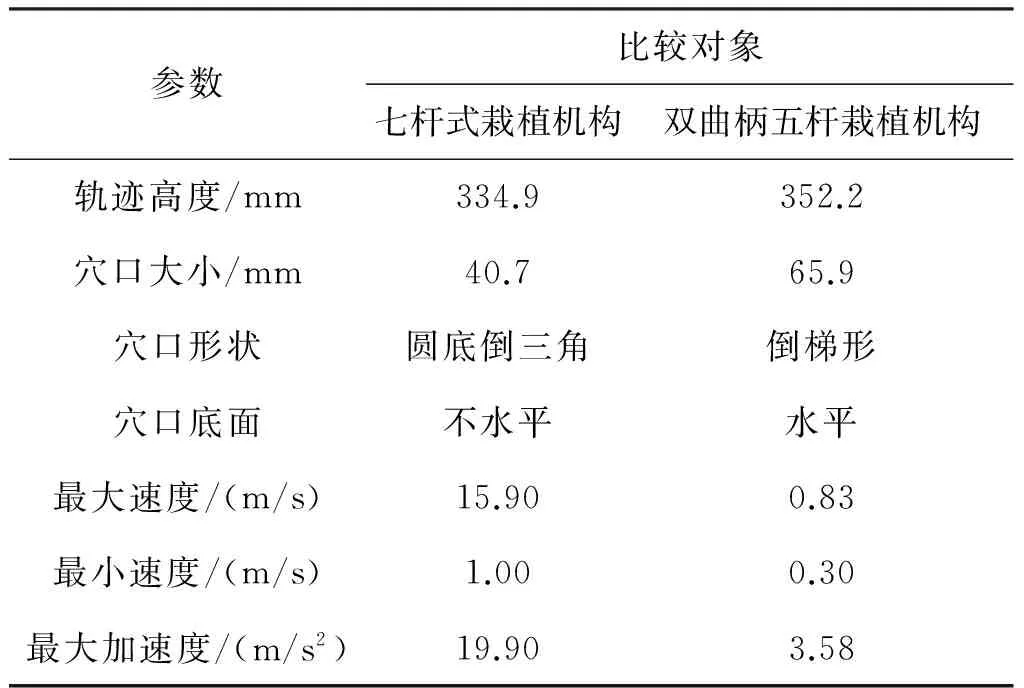
参数比较对象七杆式栽植机构双曲柄五杆栽植机构轨迹高度/mm334.9352.2穴口大小/mm40.765.9穴口形状圆底倒三角倒梯形穴口底面不水平水平最大速度/(m/s)15.900.83最小速度/(m/s)1.000.30最大加速度/(m/s2)19.903.58
5 结 论
a)构建双曲柄五杆栽植机构的运动学模型,并据此编写仿真分析软件,通过该软件人机对话界面,对双曲柄五杆栽植机构进行运动学仿真、分析,模拟机构的实时运动状态,得到栽植点F的轨迹、速度、加速度以及栽植嘴与水平面的夹角的图线并输出轨迹高度、穴口大小的值。通过对双曲柄五杆栽植机构的输入参数进行调节,优选得到一组机构参数:L0=145 mm,L1=134 mm,L2=300 mm,L3=92 mm,L4=30 mm,L5=170 mm,XD=264 mm,YD=-45 mm,φ0=35°,φ3=25°,∠BEF=118°。上述参数所相应的运行轨迹、栽植姿态等作业性能不仅符合钵苗移栽的农艺要求,且运行速度、加速度及其波动量都不大。
b)由双曲柄五杆栽植机构运动学仿真软件的分析结果可知,曲柄OA的长度对轨迹的高度及穴口大小都有着显著影响,曲柄DC的长度对轨迹的“胖瘦”影响很大,是影响穴口大小的重要参数,对轨迹高度有一定影响,但相对而言影响较小。相位差θ03对轨迹的“胖瘦”及直立度有较大的影响,对直立度的影响大于对穴口大小的影响。
[1] 于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J].农业机械学报,2014,45(8):45-51.
[2] 张冕,姬江涛,杜新武.国内外移栽机研究现状与展望[J].农业工程,2012,2(22):21-23.
[3] 王君玲,高玉芝,李成华.蔬菜移栽生产机械化现状与发展方向[J].农机化研究,2004(2):42-43.
[4] 陈风,陈永成,王维新.旱地移栽机现状和发展趋势[J].农机化研究,2005(3):24-26.
[5] 高玉芝,王君玲,李成华.我国旱地育苗移栽机械化面临的问题及应对措施[J].沈阳农业大学学报,2004,35(2):145-147.
[6] 陈建能,王伯鸿,任根勇,等.蔬菜移栽机放苗机构运动学模型建立与参数分析[J].农业机械学报,2010,41(12):48-52.
[7] 金诚谦,吴崇友,袁文胜.链夹式移栽机栽植作业质量影响因素分析[J].农业机械学报,2008,39(9):196-198.
[8] 耿端阳,董锋,汪遵元.2ZG-2型钵苗移栽机栽直率研究[J].现化化农业,1999(8):28-29.
[9] 陈建能,王伯鸿,任根勇,等.多杆式零速度钵苗移栽机构运动学模型建立与参数分析[J].农业工程学报,2011(9):7-11.
[10] 赵雄,陈建能,吴加伟,等.变性椭圆齿轮-七杆式植苗机构运动学建模与分析[J].中国机械工程,2013,24(8):1001-1007.
[11] 陈建能,黄前泽,王英,等.钵苗移栽机非圆齿轮行星轮系栽植机构参数分析与反求[J].农业工程学报,2013,29(8):18-25.
[12] 陈建能,王英,黄前泽,等.钵苗移栽机变形椭圆齿轮行星系植苗机构优化与试验[J].农业机械学报,2013,44(13):52-56.
(责任编辑: 康锋)
Kinematic Analysis on Double-crank Five-bar Planting Mechanism
HEXiaojing1,2,SUNXincheng1,2,CHENJianneng1,2,TONGZhipeng1,2,ZENGGongjun1,2,WANGChuan1,2
(1.Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018, China; 2.Zhejiang Province Key Laboratory of Transplanting Equipment and Technology, Hangzhou 310018, China)
To analyze the operation capability such as the trajectory, posture and the hole size of the double-crank five-bar planting mechanism, the displacement, velocity and acceleration equations were deduced. The kinematic simulation analysis software was compiled by Matlab. The influence of key parameters of the mechanism on its working performance was analyzed and key parameters include the length of two cranks as well as the initial phase differencec. As indicated in the analysis result, the length of one crank had an important influence on the trajectory height and the hole size of the transplanting tip. The length of the other crank had some effects on the trajectory height, and it had a far greater impact on the hole size. The initial phase differencce of two cranks had an significant influence on the trajectory shape and the verticality of the trajectory after planting, while it had few influences on the trajectory height and the hole size. Based on the analysis results of the parameters, a group of optimum parameters were obtained by this software, whose corresponding trajectory and posture were better than IsekiCompany’s transplanting machine, and it could satisfy the needs of planting.
double-crank five-bar planting mechanism; vegetable transplanter; kinematic analysis; working performance
10.3969/j.issn.1673-3851.2016.03.008
2015-05-11
国家自然科学基金项目(51275481);高等学校博士学科点专项科研基金(博导类)项目(20123318110001);浙江理工大学科研创新团队专项项目
何小晶(1991-),女,浙江金华人,硕士研究生,主要从事现代农业装备与技术方面的研究。
陈建能,E-mail:jiannengchen@zstu.edu.cn
TH112.1
A
1673- 3851 (2016) 02- 0198- 07 引用页码: 030402
