立式金属罐轮足组合爬壁机器人设计
2016-09-14安会朋佟仕忠付贵增张采凤
安会朋,佟仕忠,郭 颖,付贵增,张采凤
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺 113001)
立式金属罐轮足组合爬壁机器人设计
安会朋,佟仕忠,郭 颖,付贵增,张采凤
(辽宁石油化工大学 信息与控制工程学院,辽宁 抚顺113001)
为了提高爬壁机器人在立式金属罐检测作业时的运动速度和负载能力,提出一种用于立式金属罐壁面检测的爬壁机器人设计方案。爬壁机器人采用永磁吸附三轮步进结合四足支撑的运动方式。介绍了其基本机械结构,设计了AT89C51微控制器为核心构成直流电机驱动电路、遥控电路、电源电路、驱动电路等模块。通过一系列的仿真和型式实验达到了对检测机器人的基本要求。
爬壁机器人;立式金属罐;机械结构;永磁吸附
立式金属罐是石化行业常用的存储设备,因此对其容量计量检测的准确与否直接关系到企业的成本高低和利润多少。传统的人工检测方法[1]不仅危险、效率低下,而且由于罐体高,圆板直径、板高、板厚及保温罐内径向偏差等人工无法测量,而导致计量失准。文中研制一种永磁吸附三轮步进结合四足支撑的运动方式[2]爬壁机器人解决立式金属罐检定过程中的存在的问题。
1 爬壁机器人整体机械结构
如图1、图2所示爬壁机器人的基本结构为4个磁力座、两个驱动轮和一个导向轮。正常行进状态时磁力轮接触于金属壁面,磁力座收起。前置两个驱动轮带动后置导向轮使爬壁机器人本体移动。爬壁机器人采用差动转向原理,向右转弯时右侧轮减速,左侧轮加速。同理,向左侧转向时左侧轮减速右侧轮加速。当爬壁机器人停止移动时,驱动轮停止转动,磁力座放置于壁面,便于人工作业。此种机械结构解决了轮式爬壁机器人附着力不足的同时又克服了足式爬壁机器人行进速度慢的缺点[3]。
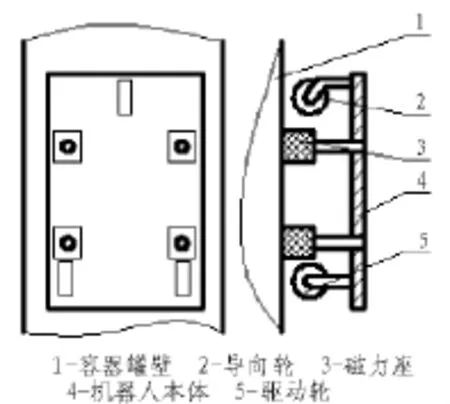
图1 爬壁机器人机械结构图Fig.1 Diagram of wall climbing robot mechanical structure
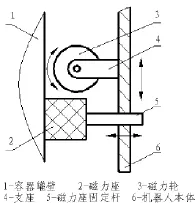
图2 爬壁机器人足部简图Fig.2 Diagram of wall climbing robot foot
2 爬壁机器人控制系统设计
爬壁机器人的控制系统采用分布式控制系统:上位机采用的是工业计算机,主要完成对金属壁面的进行实时显示,以便人能够了解金属罐壁面的腐蚀、孔洞、凹坑、裂纹等信息[4];下位机是单片机控制系统,主要控制爬壁机器人的运动状态。
为了完成检测任务,机器人必须摄像机在金属罐外壁面上爬行,而出于对操作员工作环境等因素的考虑,这样就需要下位机处于地面上,因此爬壁机器人与上位机之间的通讯长度长达几十米。
爬壁机器人控制系统主要由主电路模块,红外遥控模块,电源模块,驱动模块组成。红外遥控模块主要负责遥控爬壁机器人的运动;视频监控模块负责金属罐壁面信息的采集;各模块之间的关系如图3所示。

图3 控制系统总体结构Fig.3 Diagram of the control system
2.1控制系统硬件设计
控制系统主要由主电路模块、电源模块、驱动模块、视频监控模块、遥控模块组成。电源主要由24 V蓄电池供电,作为电机的驱动电源,通过MC34063降为5 V的直流电,作为单片机的驱动电源。视频监控模块主要是采集金属罐表面的数据信息,然后通过无线传输将数据输出到上位机,以便数据成像。遥控器模块主要由BC7210、飞利浦公司的SAA3010和发射头、接收头组成,由SAA3010和发射头组成红外信号的编码发送电路,由BC7210和接收头组成红外信号的接收译码电路。
2.1.1主电路模块
主电路模块是整个控制系统的基础部分,其主要包括AT89C51单片机、晶振、复位电路、看门狗电路。主电路模块是整个系统的中央控制单元,其主要完成对输入的信号进行处理,并发出指令控制各个模块的运行,电路图如图4所示。

图4 主电路控制图Fig.4 Chart of the main circuit
2.1.2电源模块
由于爬壁机器人本体重量有7 kG,运动时负重能力要求达到140 N,静止时负载能力要求达到1 000 N,因此要求驱动电机有比较大的输出扭矩和适合的电源。本方案中爬壁机器人的供电电源选用的+12 V蓄电池,其提供的电池容量为60 Ah,将两节电池串联提供24 V电压。单片机控制系统的输入电压为+5 V,选用MC34063来作为DC-DC降压电路。
2.1.3驱动模块
爬壁机器人的驱动系统属于差动驱动系统,采用的是单片机和继电器组合的方式来完成的。爬壁机器人的驱动系统包括4个直流电机、两个电机和4个推杆电机。所有的驱动电机的额定电压都为24 V。4个直流电机主要用来控制4个磁力座的吸附和断开。两个电机用来控制驱动轮运动和转向。4个推杆电机用来控制磁力座的收起和放置。每个电机的启停和正反转通过单片机控制两个继电器来实现,一个继电器控制电机的启动和停止,另一个继电器控制电机的正反转[5]。

图5 直流电机驱动电路Fig.5 Diagram of DC motor drive circuitry
2.1.4红外遥控模块
红外遥控模块主要完成对爬壁机器人的运动进行实时控制,由发送和接收两个部分组成。发射端的主要元件为红外发光二极管,发送端将待发送的二进制信号编码调制为一系列的脉冲串信号,通过红外发光二极管发射红外信号。红外接收完成对红外信号的接收、放大、检波、整形,并解调得到TTL电平。的编码信号,再送给单片机,经单片机译码并执行去控制相关对象。如图6所示。

图6 红外线通信原理图Fig.6 Diagram of infrared communication
2.1.5视频监控模块
数字视频监控系统采用的是数字视频信号[6],需要相应的硬件将模拟视频信号转化成数字信号并且压缩,这样才可以由计算机直接处理并可在数字通讯线路上直接传输。考虑到硬件压缩的效率较高且质量较好,因此选择高性能视频采集压缩卡。它直接安装在计算机上,通过它可以将模拟视频信号、音频信号实时数字化并压缩编码,然后交由计算机直接处理,如此就可以实现对视频的分屏显示、动态储存、实时捕捉和实时发送等功能。采用模拟摄像机网络监控系统结构如图7所示。

图7 监控系统结构图Fig.7 Diagram of camera surveillance system
2.2控制系统软件设计
爬壁机器人控制系统的主要任务是对爬壁机器人运行速度的控制与调节、采集金属壁面的图像信息,并与上位机进行数据传输和通信功能;爬壁机器人采取模块化编程方式。将程勋按着功能划分为各个模块,然后根据各个模块进行程序设计。
图8所示为控制系统软件主程序流程图。整个控制体系通过红外遥控器接受来自控制系统的指令,根据该指令控制爬壁机器人各种电机的协调运转,从而保证爬壁机器人能够按照预期的设想在金属壁面上实现前进、后退和转向。系统中,首先初始化保证爬壁机器人四只仿生足(磁力座)都能吸附在金属罐壁面上,然后根据发送的控制指令,磁力座收起,驱动轮来执行前进、后退、旋转。当爬壁机器人需要停止作业时仿生足放置于壁面。爬壁机器人行走过程中,摄像头工作,开始摄像,采集金属罐壁面图像。当接收到停止指令时,爬壁机器人暂停运转,等待接收下一个指令。当任务完成时,机器人结束任务。

图8 控制系统主程序流程图Fig.8 Chart of the main program flow
3 结 论
文中介绍的轮足组合式爬壁机器人结合了两种运动方式的优点,经过实验论证其静止时负载能力达到1 100 N,运动时负载能力为160 N左右。运动最大速度为5 m/min。整体性能达到了日常作业要求。
[1]田兰图.油罐检测爬壁机器人技术及系统研究 [D].北京:清华大学,2004.
[2]Wang Zhi-heng,Bao Guan-jun,Zhang Li-bin.Development and control of flexible pneumatic wall-climbing robot[J].Cent.South Univ.Technol.,2009(16):961-970.
[3]刘爱华,王洪光,房立金.一种轮足复合式爬壁机器人机构建模与分析[J].机器人,2008(6):486-490.
[4]Luk B L,Cooke D S,Galt S,et al.Intelligent legged climbing service robot for remote maintenance applications in hazardous environments[J].Robotics and Autonomous Systems,2005:142-152.
[5]张立国.立式金属罐容积检定爬壁机器人本体设计[D].抚顺:辽宁石油化工大学,2010.
[6]刘富强.数字视频监控系统开发及应用[M].北京:机械工业出版社,2003.
[7]张伟,龚娇龙,张惠芳,等.基于视觉导航的变电站智能巡检机器人的研究[J].陕西电力,2015(6):63-66,74.
Design of a wheeled and myriapod wall-climbing robot for vertical metal tank
AN Hui-peng,TONG Shi-zhong,GUO Ying,FU Gui-zeng,ZHANG Cai-feng
(Liaoning Shihua University School of Information and Control Engineering,Fushun 113001,China)
In order to improve the movement speed and load capacity of the wall-climbing robot during the detection process,a design scheme for wall climbing robot for vertical metal wall detection is introduced.The travel mode of the wall climbing robot is a combination of permanent magnetic adsorption wheels and quadruped support.A mechanical structure is proposed.The AT89c51 micro controller is used as core component of the control system,and the remote control circuit,power supply circuit,drivecircuitisalsodesigned.Through thesimulationandaseriesofexperiments,thedetectionrobotmeetthebasicrequirements.
wall climbing robot;vertical metal tank;physical construction;magnetic adsorption
TN05
A
1674-6236(2016)02-0079-03
2015-03-06稿件编号:201503095
安会朋(1987—),男,河北石家庄人,硕士研究生。研究方向:智能仪表,计量。