基于场强技术的轮胎压力监测系统自动定位的改善方法
2016-09-12史卫华傅国锋孙波同济大学上海01804上海保隆汽车科技股份有限公司上海01619
史卫华 傅国锋 孙波(1.同济大学,上海01804;.上海保隆汽车科技股份有限公司,上海01619)
·基础研究·
基于场强技术的轮胎压力监测系统自动定位的改善方法
史卫华1,2傅国锋2孙波2
(1.同济大学,上海201804;2.上海保隆汽车科技股份有限公司,上海201619)
为解决现有轮胎压力监测系统在轮胎定位过程中ID匹配不准确的问题,分析了现有系统中利用场强技术的自动定位方法的优缺点,基于理论计算和对实际测试数据的分析,提出了双轴加速度与场强识别技术相结合的改善方案,并给出了实际控制方法和策略。在不同路况条件下进行了实车测试,测试结果表明,改进后的系统自动定位成功率较高,定位效果明显改善。
主题词:TPMS场强识别定位
1 前言
轮胎压力监测系统(Tire Pressure Monitoring System,TPMS)因其在整车安全性和经济性方面的重要作用,如今已经越来越受到市场和用户的关注,国内外整车厂纷纷将其作为整车标准配置。TPMS一般由安装在轮胎上的用于检测轮胎压力和温度等状态的传感器以及安装在车箱内的用于接收传感器信号的接收端构成。TPMS要可靠地工作,接收端必须能识别轮胎传感器的ID以及轮胎的安装位置(左前轮、右前轮、右后轮、左后轮等)。TPMS中的轮胎定位是指接收端识别所需要监控的传感器ID,并将传感器ID与该传感器所处的轮胎安装位置建立一一对应关系,存储起来。接收端收到传感器发送的无线信号后,首先提取传感器的ID,并根据存储的传感器ID和轮胎位置信息判定是否为本车传感器:如果是,根据其位置信息进行处理和显示;如果不是,则丢弃不予处理。当传感器ID或轮胎位置发生变化,均需要重新进行TPMS的轮胎定位。因此,轮胎定位技术除用于整车厂装配线外,还用于售后轮胎换位以及传感器更换等需要重新定位的场合[1~3]。
在整车装配线上一般会读取安装于4个轮胎的传感器ID,并写入TPMS的接收端。但由于误操作或者射频信号干扰等原因,会导致写入接收端的传感器ID出错,这些错误在整车生产线上很难自动检测,从而导致售后阶段需召回车辆重新匹配。整车生产线或产品工作模式设计不合理均会产生较多的误写入问题。目前长安、东风乘用车、郑州日产等整车厂均遇到过类似问题。即使整车厂严格控制生产流程确保车辆出厂时传感器ID匹配正确,在车辆售后阶段进行轮胎换位或更换传感器等需要重新进行TPMS的轮胎定位时,依然存在同样问题。
2 国内外T PMS定位技术介绍
目前TPMS的定位技术主要有以下几种:
a.基于专有设备或者工具实现,需要人工操作,且需要投入的设备或工具成本较高。此类设备一般采用低频唤醒技术。若专有设备发出的唤醒功率低,监测模块相隔距离较远,易出现无法唤醒的情况;若专有设备发出的唤醒功率大,易出现误唤醒的情况。如果采用手持式工具,则需要人为选择轮胎位置,易出错。
b.在轮胎附近安装低频唤醒装置[1]。需要读取传感器信号时,驱动低频唤醒装置发送低频信号,激活传感器发送信号,从而实现定位功能。此方案需要布置4个低频唤醒装置,而低频唤醒装置的成本高达20~30元,几乎等同于传感器的价格。
c.基于场强的定位技术[2]。由于前2种方法成本高且可靠性低,国内外TPMS厂商展开了自动定位技术的研究,出现了利用射频信号强弱实现定位的技术(Wheel Autolocation,WAL)。但在WAL技术中,轮胎旋转及车重变化均会对传感器信号强度产生较大影响,易导致WAL定位失败。
3 场强定位技术分析
无线信号的空间衰减程度与空间距离相关,距离越远,衰减越多。利用这个原理,可通过测量接收机收到的胎压信号的强弱实现位置的区分[2]。如图1所示,接收机接收到的信号强弱与和轮胎位置关系是:左前轮>右前轮>左后轮>右后轮。

图1 场强定位原理示意
通过理论分析,场强定位技术是可行的,而且在静止的车辆模型上也是可靠的。
但是,信号强度对距离的衰减一致性需要在稳定的空间衰减环境下才能实现。在实际车辆上,接收机与轮胎之间除空气外,还有金属结构,因此具体的衰减数值并不能用直线距离进行等效,需要对车辆进行信号衰减强度的标定测量,这也是目前大多数场强定位技术用于提高定位准确性的手段。然而批量化应用后发现定位准确度仍然不是很高,而且定位成功所需的边界条件较为严格,例如车辆需要维持在平坦道路、稳定的速度范围,车内货物和人员数量均在一定范围内等。
进一步分析发现如下因素存在较大影响:
a.轮胎在旋转过程中信号发射的位置不稳定,导致接收机接收到的信号强度不稳定,即便空间距离不一致,不同轮胎的信号强度仍然存在重叠区域。轮胎信号发射模型如图2所示。
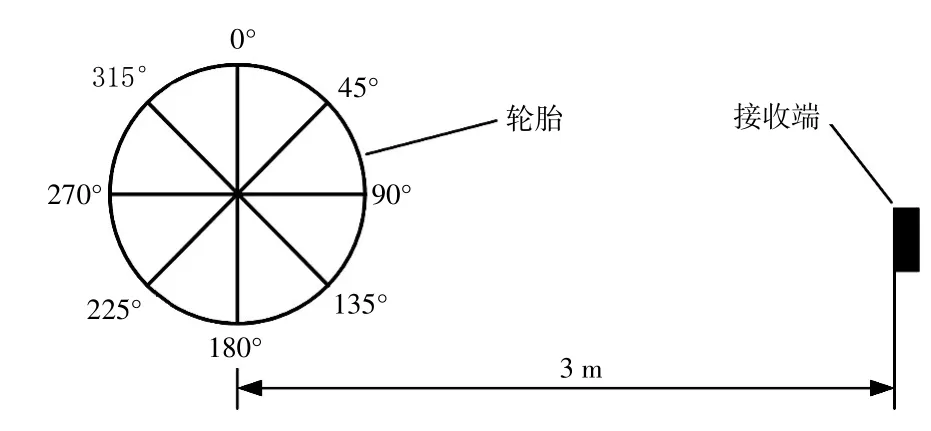
图2 传感器轮胎位置和接收端位置示意
根据胎压传感器在轮胎上的位置不同,区分为8个点,其在3m处的接收信号强弱数据见表1。

表1 传感器处于轮胎不同位置的接收端场强
通过表1可以看出,传感器在轮胎上旋转1周,不同位置发出的信号在接收端处的强度差异可达11 dBm。
同一接收端接收不同位置轮胎的场强值测试结果见表2。
由表2可以看出,4个轮胎在不同位置的信号强度有较大的重叠区域,这导致依据传感器随机发送的信号强度可能无法区分其位置。
b.接收机安装在车箱内,人员和货物的增减影响了信号传输路径,导致信号衰减程度发生变化,从而使得某些情况下信号衰减产生重叠区域,接收机判定位置不准确。

表2 同一接收端接收不同位置轮胎的场强
4 改善方案设计
针对上述分析提出了3个改善点:利用双轴加速度传感器区分左、右位置,在此基础上,再利用场强大小区分前、后位置;通过加速度的采集和计算,拟合轮胎旋转时的加速度曲线,计算出旋转周期,通过控制发送时间进行定点发送,消除轮胎旋转对信号强弱的影响[4];接收端安装方式由安装在车箱内改为安装到车箱外,避免车箱内货物和人员对信号衰减产生影响,使得信号传播途径稳定。
4.1 利用双轴加速度传感器区分左、右位置的算法设计
本文选用集成有X轴/Z轴的双轴加速度传感器的TPMS传感器芯片,双轴加速度传感器实际上测量了轮胎旋转时的切向加速度(X轴)和离心加速度(Z轴),由于轮胎的安装位置不同,左、右侧轮胎上传感器X轴向的加速度存在相反的矢量关系,即车辆前进时,左侧轮胎逆时针旋转,右侧轮胎顺时针旋转。因此左、右侧轮胎的X轴和Z轴的加速度相位差刚好相反,如图3和图4所示。
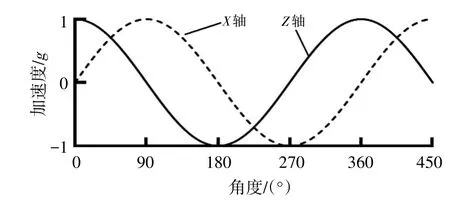
图3 左侧传感器加速度曲线

图4 右侧传感器加速度曲线
利用这个差异,传感器可以识别自身所处的位置是左侧还是右侧。
软件策略上,进入到定位算法模式下,密集采集X轴和Z轴加速度,进行两者夹角差异计算,根据计算结果判定自己所处位置是左侧还是右侧,然后加载到射频数据中发射出去。具体定位流程如图5所示。
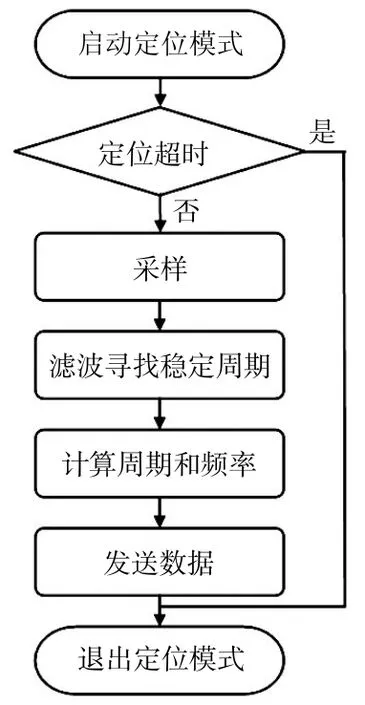
图5 左、右定位软件流程
在实际使用过程中,轮胎变速运行,且变化是随机的,另一方面车辆所处环境中干扰源多,如振动、打滑等,导致实际采样数据与理论值差距很大,如图6所示。

图6 无滤波算法的Z轴加速度
为使计算结果准确,需要对采集到的数据进行滤波处理,将极差值滤除后,利用剩余的数据进行波形还原和分析计算,从而得出X轴和Z轴的加速度相位差。同时,通过计算不同最大值之间的时间差,可以计算出加速度的曲线周期。经过滤波后的加速度如图7。
图7 加入滤波算法的Z轴加速度
可以看出,滤波后的加速度值更接近实际,再根据上述的左、右定位软件策略进行分析后,实际测量和计算的结果如图8所示,可以准确地定位左、右侧轮胎安装的传感器。
图8 左、右侧轮胎定位数据
为进一步提高准确性,在一次判定成功的基础上再进行一次判定,若2次判定成功且结果一致,则认为判定结果正确。
4.2 定点发送算法设计
如前所述,可以通过加速度数据的测量和分析,从而计算出传感器所处轮胎的旋转周期,这样就可以选择相对固定的位置(传感器处于轮胎上的角度如图2所示)将信号发出。原理如图9所示。
图9 定点发送原理
针对表2中的车辆,在左、右定位的基础上,可以选择在180°的位置将胎压数据发出,接收端接收到信号后,通过读取接收的场强信号强度指示(Received Signal Strength Indication,RSSI)值,可以清晰地分析出传感器所处的轮胎位置,从而准确定位。
4.3 接收端位置
如前所述,车箱内的乘员和货物的变化关系会导致无线信号的传输条件发生变化,影响实际的信号强度,导致定位错误。因此,将接收器安装在右后侧轮胎附近(图10),由于车辆底盘为金属环境,车箱内的物品增减不会影响到底盘的空间环境,这样就使得无线信号的传输环境相对稳定,信号强度也比较平稳,分析结果比较准确。

图10 接收端位置示意
该位置实际场强测试值如图11。
图11 接收端位置实际场强
5 实车测试
采用本文所述方案进行了实车各种路况条件测试,分别在普通平坦道路、上下坡道路、转弯道路等进行了24次测试,成功23次,失败1次,有效定位平均耗时82.6 s,成功率95.83%。
测试过程中,基本在2min内完成定位,其中1次由于车速较低,定位数据量不足,直至10min的定时最大时间到,系统启动定位算法,完成定位。定位失败1次,原因同前。通过数据分析可知,在车速达到要求的情况下,该方法基本可以适应各种工况,满足使用要求。
1吴晓君,张笑瀛.TPMS中轮胎自动定位功能的实现.汽车科技,2006(1):14~16.
2韩文斌,韩云霄,傅国峰,等.场强识别技术在TPMS自动定位中的应用.汽车电器,2012(4):64~68.
3江锐.LF低频唤醒技术在TPMS中的应用.计算机与数字工程,2007(3):155~157.
4刘占亚,付永庆,姜玉蕾.用加速度传感器控制TPMS定位发射的方法.应用科技,2010(10):41~43.
(责任编辑斛畔)
修改稿收到日期为2015年12月22日。
Im provement M ethod of TPMSAutolocation Based on Field Intensity Technology
ShiWeihua1,2,Fu Guofeng2,Sun Bo2
(1.Tongji University,Shanghai201804;2.Shanghai Baolong Automotive Corporation,Shanghai 201619)
【Abstract】ID Mismatching exists in tire location of the existing tire pressuremonitoring system(TPMS),to solve this problem,the advantages and disadvantages of current wheel autolocation technology of TPMS which uses field intensity technology are analyzed.Based on theoretical calculation and test data analysis,an improvementmethod including doubleshaft acceleration and field intensity identification technology is proposed,and practical control method and strategy are presented.Road tests in different road conditions show that the improved system features high autolocation ratio,and the autolocation effect is improved obviously.
TPMS,Field density identification,Autolocation
U463.61;TN98
A
1000-3703(2016)08-0014-04