基于ADAMS的电梯钢丝绳系统建模与仿真
2016-09-01马幸福
马幸福
(湖南电气职业技术学院 机械工程系,湘潭 411101)
基于ADAMS的电梯钢丝绳系统建模与仿真
马幸福
(湖南电气职业技术学院 机械工程系,湘潭 411101)
以电梯钢丝绳提升系统为模拟对象,针对钢丝绳直接建模困难的问题,利用ADAMS二次开发宏命令完成钢丝绳离散化建模、轴套力连接及碰撞接触力添加,成功建立电梯钢丝绳系统仿真模型,并对电梯系统及钢丝绳进行运动仿真分析.仿真结果表明电梯垂直运动特性与钢丝绳的运动特性均符合实际运动规律,验证了建模方法的正确性,为电梯系统的动力学研究及舒适性的优化提供了理论依据.
电梯提升系统;钢丝绳;宏命令;轴套力;振动加速度
0 前 言
电梯是城市交通中广泛使用的垂直提升设备,其中钢丝绳系统是电梯最主要的承重部件,电梯系统的整个重量最终全部通过钢丝绳进行承载,电梯提升系统如图1所示.在电梯加速、减速等不同工况下,伴随曳引机高速旋转的振动,钢丝绳系统的动态张力变化很大,产生水平方向与垂直方向的振动,对轿厢系统产生很大的冲击,严重影响电梯运行的舒适性与安全性,同时也会对钢丝绳本身的使用寿命造成影响.因此,对电梯钢丝绳的动态特性进行研究,具有很重要的现实意义.
电梯行业中对于钢丝绳的动态性能判定方法停留在传统的标记法、振动法、弹簧称法等[1],而进行钢丝绳动态特性试验则比较困难.目前常采用虚拟技术进行绳索类部件仿真分析[2,3],李济顺等[4,5]利用相对节点法,采用Recurdyn动力学软件建立摩擦式提升机虚拟样机模型进行分析;肖闯[6]利用壳单元与梁单元将电缆绳索简化为细长钢带结构进行有限元模拟与模态测试;侯筱婷等[7]利用EON Professional动力学组件模拟塔吊钢丝绳崩断效果仿真;何洁等[8]利用“质点—杆”模型建立空间绳系系统模型,研究绳系系统由释放到稳定状态的受力特性.以上方法各有优点,侧重点各不相同.
电梯钢丝绳属于柔性体,本文采用多体动力学分析软件ADAMS对电梯钢丝绳进行建模与运动仿真分析.在ADAMS中难以直接对钢丝绳进行模拟,针对此问题,利用ADAMS宏命令程序对钢丝绳进行离散化建模,从而分析电梯钢丝绳及整个提升系统的运动仿真.
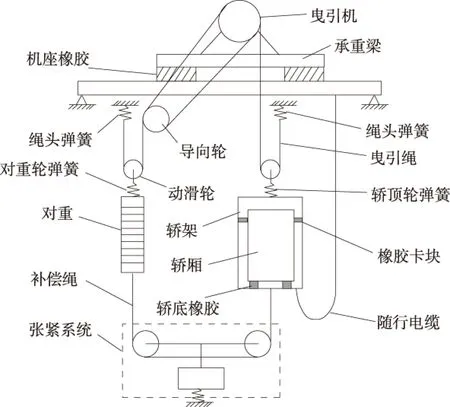
图1 电梯提升系统结构图
1 ADAMS钢丝绳建模
1.1钢丝绳建模方法
ADAMS软件具有强大的三维建模与运动仿真功能,但是没有专门的模块进行绳索类物体建模.因此,在ADAMS/View环境下,需要采用其他的方法对钢丝绳进行模拟.目前通常有柔性体建模方法、轴套力建模方法与旋转副建模方法等几种方法.
柔性体建模方法利用有限元分析软件生成的MNF模态中性文件,再在动力学分析软件中生成钢丝绳柔性体,可满足一般精度仿真要求,但不能模拟钢丝绳反向缠绕问题,仿真精度中等.
轴套力建模方法利用轴套力连接离散化的小段钢丝绳,可较好地模拟钢丝绳的拉伸、弯曲、振动、缠绕动力学仿真问题,但是钢丝绳离散化的数量和轴套力的数量影响仿真的时间,仿真速度慢,对电脑配置有一定要求,仿真精度较高.
旋转副建模方法利用旋转副连接离散化的小段钢丝绳,与轴套力建模方法相类似,但是不能模拟钢丝绳的扭转、反向缠绕问题,仿真精度中等.
本文采用第二种方法即轴套力建模方法对钢丝绳系统进行建模.

1.2参数设置
为了模拟钢丝绳的实际动态特性,设定钢丝绳的刚度系数:拉伸刚度系数K11=EA/L、剪切刚度系数K22=K33=GA/L、扭转刚度系数K44=Gπd4/32及弯曲刚度系数K55=K66=Eπd4/(64L).其中E为钢丝绳弹性模量,取E=200 GPa;G为钢丝绳剪切模量,取G=800 GPa;d、A分为钢丝绳直径与横截面积,取d=10 mm、A=78.5 mm2;L为离散化钢丝绳长度,取L=100 mm.
钢丝绳与曳引机的碰撞接触力只能依据经验或实验数据确定.接触刚度系数如果过低,会导致钢丝绳嵌入曳引机,难以有效反应出钢丝绳的力学性能;接触刚度系数如果过高,由于曳引机转速很快,容易导致钢丝绳从曳引机上弹飞.参阅资料,取接触刚度系数为1×104N/mm、非线性指数取1.5.
根据钢丝绳的材料参数,计算出轴套力各个刚性
系数.拉伸阻尼系数和扭转阻尼系数都分别设定为10 N·s/mm和10 N·mm·s/(°)[9].
1.3宏命令建模
电梯钢丝绳长度通常在几十米以上,离散化过程中如果手动一段段建模,再手动添加轴套力与接触力,既费时又易出错.而采用ADAMS二次开发宏命令可以轻松完成离散段钢丝绳的复制与连接、离散段钢丝绳之间添加轴套力、离散段钢丝绳与轮子之间添加接触力与碰撞力等建模问题.为减小计算工作量,取1000段离散化小段钢丝绳进行模拟,每段钢丝绳长50 mm,钢丝绳的运动学参数、动力学参数以及物理参数尽量与实际钢丝绳相似,部分宏命令语句如下:
variable create variable_name=num & integer_value=1
while condition=(num<999)
marker create &
marker_name = (eval(".model_1.part_"//num//"&
.MARKER_1"//num+1000)) &
location = 720,(eval(-1063.895-128.61*num)),0.0 &
orientation = 0d, 90d, 90d
由于交通要适应社会的发展状况,随着社会经济的飞速发展,世界上的城市交通理论有了很大的变化。我国的城市交通理念也有着飞速的发展,我国近代大数据技术的出现给城市交通规划理论带来了很多的动力。随着我国大数据的兴起,出现了越来越多的大数据职业。大数据是近代新兴的职业,虽然现在大数据的技术还不是很完善,但在城市交通规划理论的变革方面有很大的促进作用。
marker create &
marker_name = (eval(".model_1.part_"//num+1&
//".MARKER_1"//num+2000)) &
location = 720,(eval(-1063.895-128.61*num)),0.0 &
orientation = 0d, 90d, 90d
force create element_like bushing &
bushing_name = (eval(".model_1.bushing_"//num)) &
adams_id = (eval(num)) &
i_marker_name = (eval(".model_1.part_"//num//"&
.MARKER_1"//num+1000)) &
j_marker_name = (eval(".model_1.part_"//num+1//"&
.MARKER_1"//num+2000)) &
damping = 8, 8, 8 &
stiffness = 7.032e4, 7.032e4, 1.758e5 &
force_preload=0,0,19750 &
tdamping = 1,1,1 &
tstiffness =1.582,1.582,1.266
variable modify variable_name=num integer_value=(eval(num+1))
end!while
variable delete variable_name=num
采用轴套力建模方法,离散化的小段钢丝绳由轴套力连成一根完整的钢丝绳,较真实地反映出钢丝绳拉伸力学特性,与曳引机缠绕的效果图如图2所示.
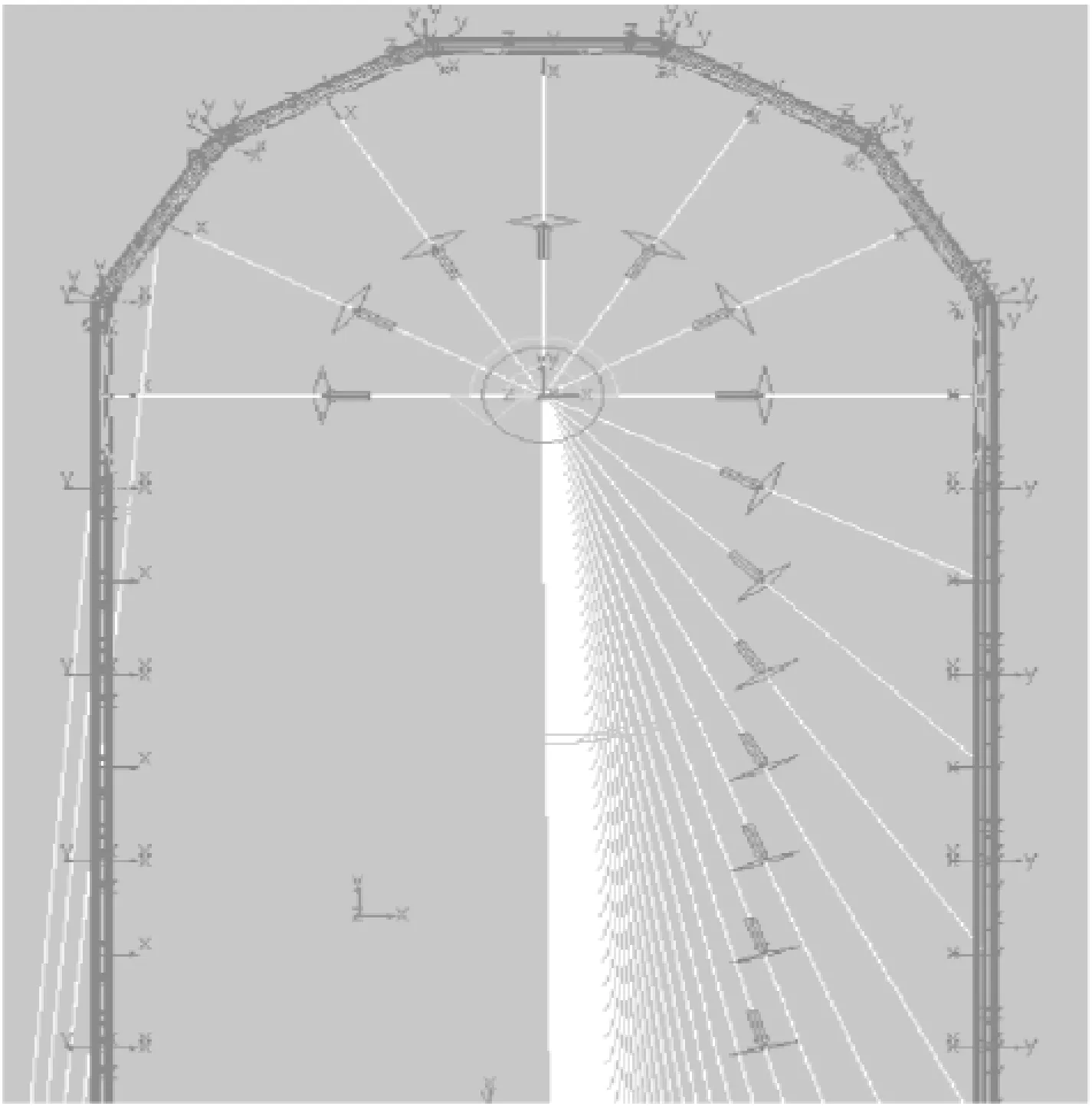
图2 钢丝绳与曳引机接触模型
2 电梯提升系统建模
电梯的垂直升降运动是依靠曳引机与钢丝绳之间的摩擦力来拉动轿厢与对重上下运行的.利用STEP(time,0,0,4,33.33)+STEP(time,4,0,5,0)+STEP(time,5,0,9,-33.33)语句给曳引机施加驱动力,设定电梯匀速运行额定速度为4m/s、最大角速度7 deg/s.曳引机的转动加速度以及钢丝绳在提升过程中的刚度变化对电梯轿厢在垂直方向运动产生振动激励.
电梯轿厢导靴与导轨滑动装配,限制了轿厢水平的自由度,防止轿厢左右剧烈偏摆.为模拟电梯的水平振动特性,将导靴简化为弹簧系统,同时以Rand函数产生一组[-1,1]之间的随机数来模拟导轨垂直方向的不平顺度.导轨表面的不平顺度将会给轿厢水平方向产生作用力,导轨—导靴系统构成了电梯水平振动的激励来源.
为了便于电梯提升系统建模,对提升系统进行必要的简化:(1)将曳引机用一个圆柱体施加驱动力进行模拟;(2)钢丝绳两端的轿厢、对重分别简化为两个立方体进行模拟;(3)电梯系统5条钢丝绳简化成1条钢丝绳,按5倍的质量—刚度系统进行模拟;(4)将机座橡胶、轿底橡胶、导靴及橡胶卡块等弹性部件简化为弹簧系统.建立电梯提升系统的仿真模型如图3所示.
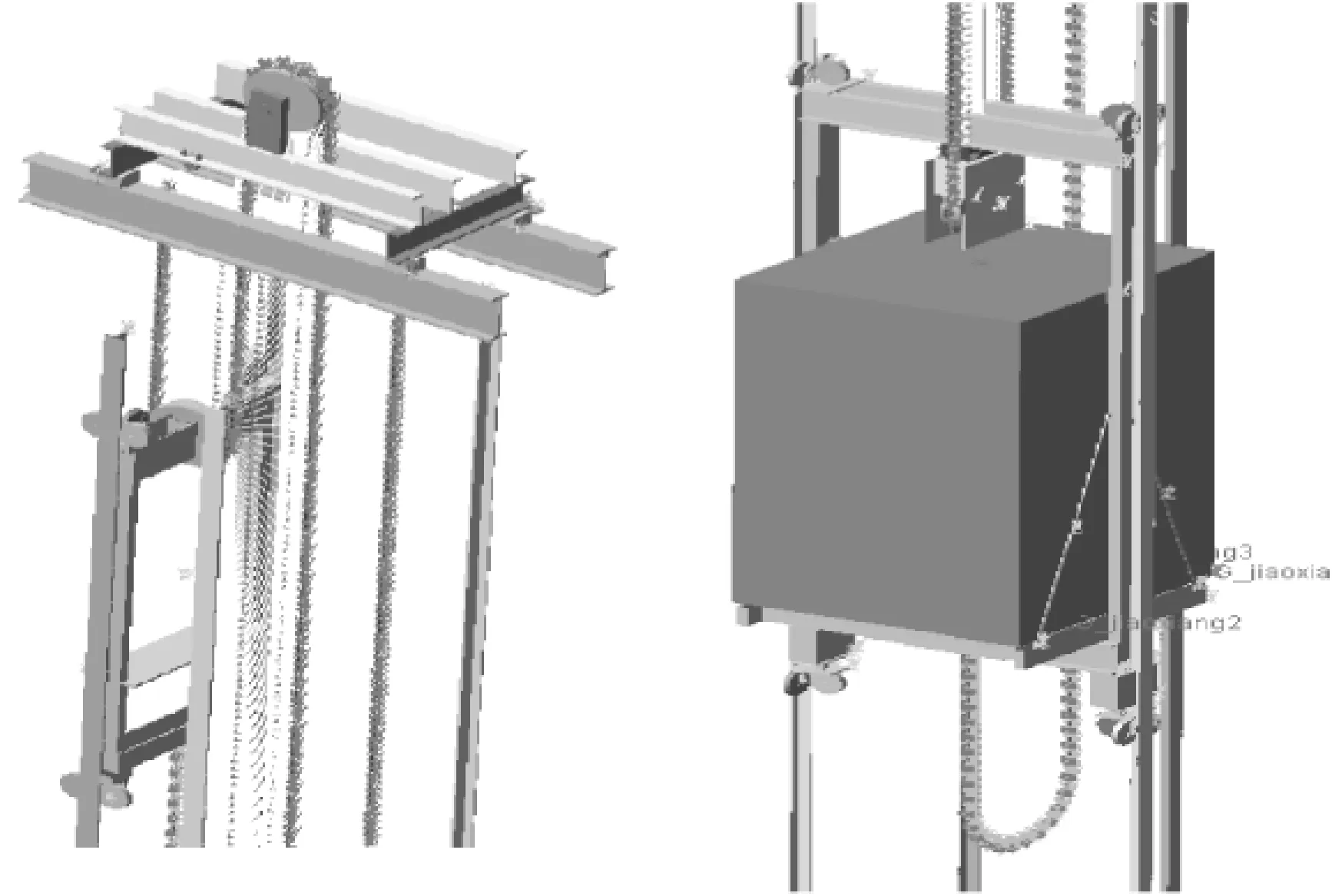
图3 电梯钢丝绳系统仿真模型图
3 运动仿真分析
电梯系统的运动特性主要是电梯的垂直运动加速度特性、轿厢的垂直振动加速度特性与轿厢的水平振动加速度特性,这3个运动特性直接关系着电梯乘坐的舒适性.仿真得到电梯系统的垂直振动加速度曲线图、垂直振动加加速度曲线图与水平振动加加速度曲线图分别如图4~图6所示.
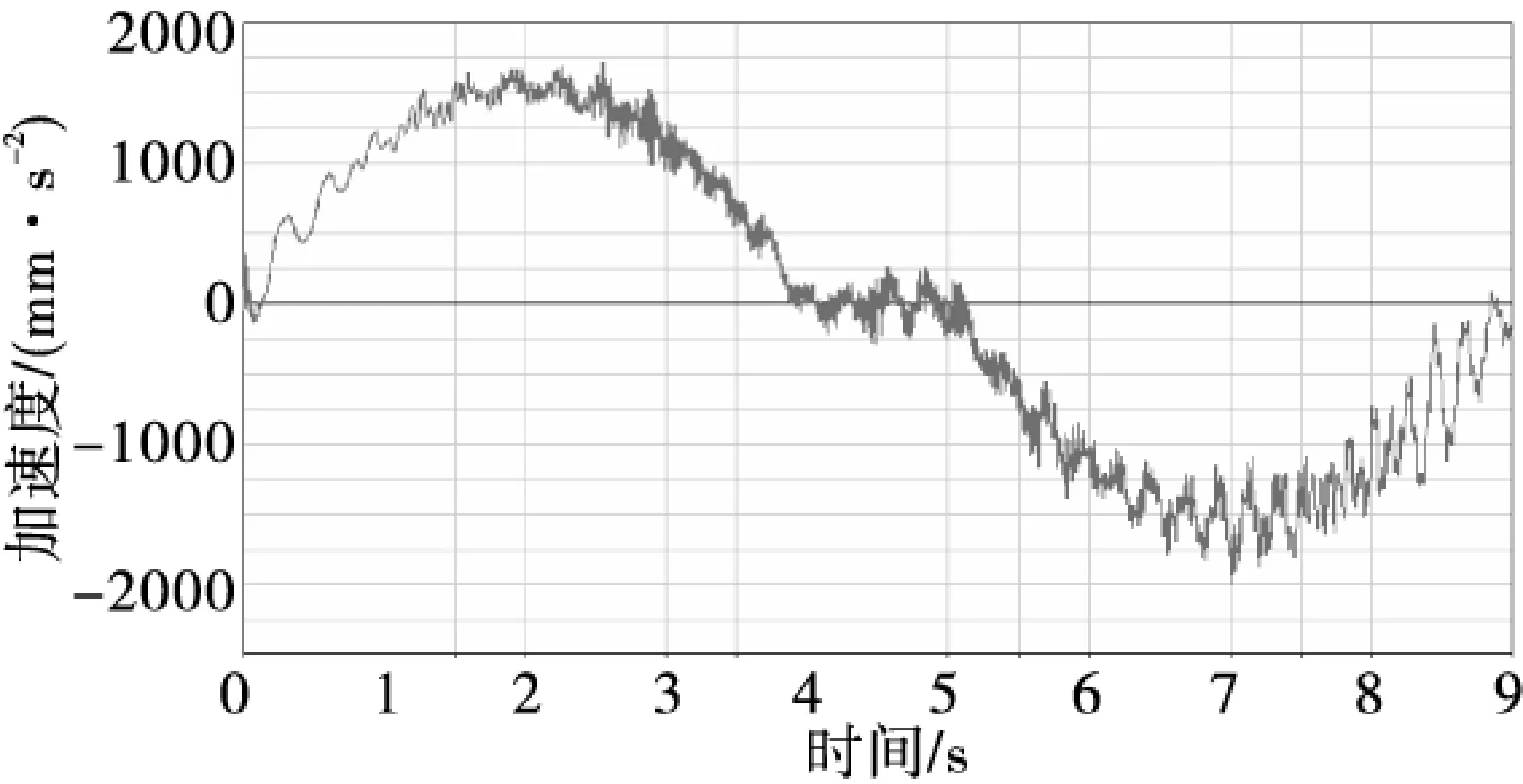
图4 电梯垂直运动加速度特性图
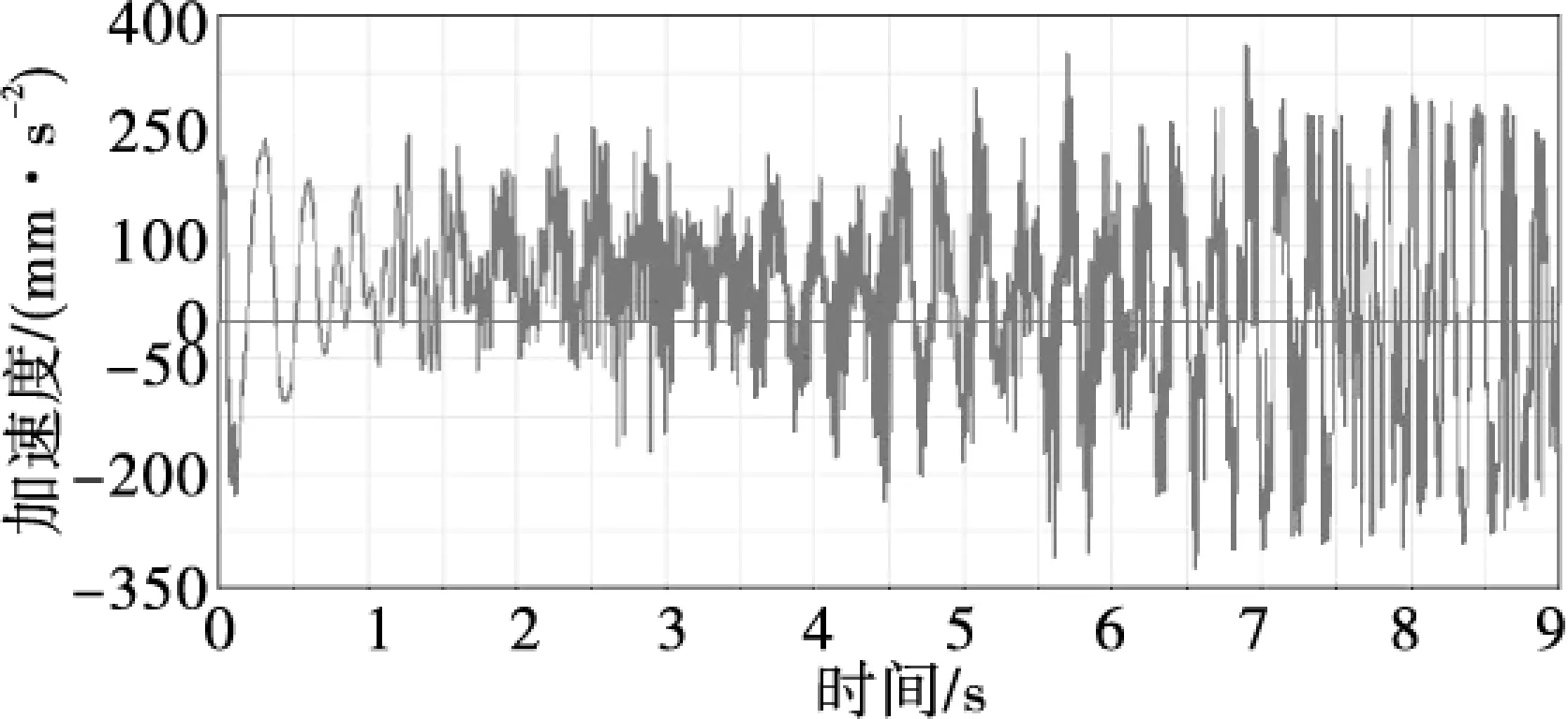
图5 轿厢垂直振动加速度特性图
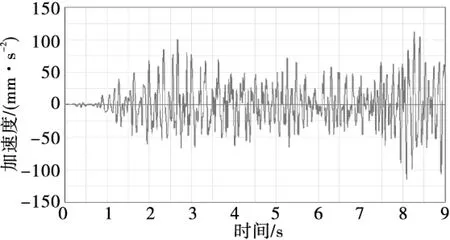
图6 轿厢水平振动加速度特性图
图4反映了电梯在曳引机驱动力下垂直运行的加速起动、匀速运动与减速制动的加速度情况,是一条刚弹耦合的振动曲线;图5反映了轿厢在曳引机—钢丝绳系统垂直激励下的垂直振动加速度特性;图6反映了轿厢在导轨—导靴系统水平激励下的水平振动加速度特性.根据国家相关电梯标准规定:对于运行速度低于6.0 m/s的电梯,轿厢垂直振动加速度不得超过0.35 m/s2,轿厢水平振动加速度不得超过0.2 m/s2.仿真结果表明,轿厢垂直振动最大加速度值为0.33 m/s2,轿厢水平振动最大加速度值为0.12 m/s2,均满足相关标准要求.
分别取相近的3个轴套力连接点作比较,轴套力连接点水平位移特性如图7所示.由图可知3个轴套力连接点动态特性趋势总体相同,最大位移0.022 mm,说明离散化的小段钢丝绳整体动态特性良好,保证了整条钢丝绳的连续性.但是轴套力连接点存在波动差,这是由于钢丝绳是一个变刚度的柔性体,加之导轨表面不平顺度的横向激励冲击,使得钢丝绳发生水平方向位移跳动现象,电梯运行速度越快,跳动越为激烈.
任取一段离散钢丝绳作分析,其水平振动特性如图8所示.钢丝绳的振动来源于水平、垂直和侧向三个方向的激励,而且由于上端的曳引机与下端的轿厢返绳轮同时转动,钢丝绳上下端同时被激发振动,振动波形在钢丝绳中间区段叠加,振动现象明显.图中钢丝绳水平振动位移最大峰值为3.0 mm,发生在整个行程的中间时间段,与实际情况吻合.
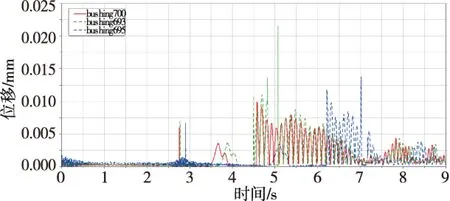
图7 轴套力连接点水平位移特性图
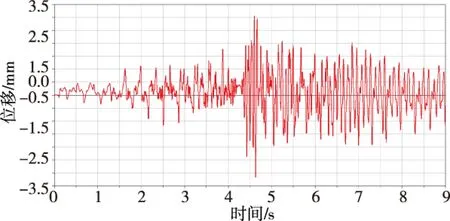
图8 钢丝绳水平振动特性图
4 结语
在电梯钢丝绳提升系统的虚拟样机仿真与分析中,通过ADAMS宏命令实现离散化钢丝绳的建模、轴套力的添加及碰撞接触力的设置.仿真分析结果表明,电梯系统的振动特性与钢丝绳的振动特性均符合实际运行规律,验证了建模方案的可行性.由于在仿真过程中对相关部件进行了等效简化,以及依靠经验值进行相关参数的设定,所以对实际仿真结果会有所影响,但本模型建立及仿真过程对于电梯提升系统的运行舒适性研究具有一定的参考意义.
[1] 王增才,邵海燕,高峰.多绳摩擦提升机钢丝绳张力监测方法分析[J].煤矿机械,2002(5):72-74.
[2] 李春明.弹性绳系统的动力学建模与计算机仿真[J].系统仿真学报,2008,20(1): 62-64,168.
[3] 徐杰.基于ADAMS的岸边集装箱起重机结构动力学仿真研究[D].武汉:武汉理工大学, 2010.
[4] 李菁,李济顺,刘义,等.虚拟样机技术在摩擦式提升机动力学分析中应用[J].机械设计与制造,2014,(9): 238-241.
[5] 刘义,陈国定,李济顺,等.摩擦提升机的虚拟样机研究[J].计算机仿真,2009,26(11):272-277.
[6] 肖闯,殷智宏.三维随行电缆简化模型有限元建模与模态实验[J].中国机械工程,2012,23(16): 1934-1938.
[7] 侯筱婷,李昌华.虚拟施工系统中虚拟塔吊动力学建模与仿真[J].机械科学与技术,2014,33(2): 189-193.
[8] 何洁,郑飞.空间绳系系统的运动仿真[J].机械设计与研究,2014,30(5): 50-52.
[9] 李俊文,卜长根,王龙.ADAMS宏命令在钢丝绳式冲击钻机虚拟样机建模中的应用[J].机床与液压,2011,39(23):150 -153.
Modeling and Simulation Based on ADAMS for Elevator Wire Rope System
MA Xing-fu
(Mechanical Department,Hunan Electrical College of Technology, Xiangtan 411101, China)
The elevator wire rope system is researched as an object. In order to resolve the difficulty of building the modeling of ropes, the macro command in the secondary development functions of ADAMS is adopted. At first, the discrete modeling of wire ropes is built, and the bushing is connected, and the impact force is added. At last, the simulation model of the elevator wire rope system is successfully built, and the dynamic characteristics of elevator system and wire rope are simulated. The results show that the elevator vertical motion characteristics and kinematics rope laws are conform to the actual movement and the method is available, which provides a theoretical basis for the dynamic study and comfort of the elevator system.
elevator hoisting system;wire rope;macro command;bushing;vibration acceleration
2016-03-15
湖南省职业教育“十二五”省级重点建设项目 (湘教通[2014]176号).
马幸福(1983-),男,硕士,讲师,工程师,研究方向:机械系统动力学.
TP 391.9
A
1671-119X(2016)03-0032-05