基于锁相环和双模速度双重控制的永磁无刷直流电机的研究
2016-09-01徐春雷韩长远国网新疆电力公司阿克苏供电公司新疆阿克苏843000
徐春雷,韩长远(国网新疆电力公司阿克苏供电公司,新疆阿克苏843000)
基于锁相环和双模速度双重控制的永磁无刷直流电机的研究
徐春雷,韩长远
(国网新疆电力公司阿克苏供电公司,新疆阿克苏843000)
无刷直流电机系统具有转矩电流比高、转速高、动态性能好、可靠性高和易于控制等优点,在中小功率驱动场合应用广泛;但其缺点是转矩脉动大并易造成速度波动,目前普遍采用速度-电流双闭环PI控制。在无刷直流电机用于某些负载变化率大及大惯量的速度控制模式下时,可能因速度不稳带来震动、谐振、噪声等问题。研究讨论了一种基于锁相环和双模的速度控制法,利用锁相环加上速度环的方法,有效改善了传统速度电流PI调节器在无刷直流电机大惯量负载中存在的转速波动问题,在实际应用中具有良好的速度控制精度和稳定性。
无刷直流电机;速度波动;锁相环;双模速度控制
1 引言
2 永磁无刷直流电机
飞轮储能系统中飞轮电机是其至关重要的部分,它是一个集电动机与发电机功能于一体的器件,承担着转换能量的重任。考虑到飞轮储能系统的运行特点,从经济、结构、性能等全方位考虑,一般飞轮储能系统中选取永磁无刷直流电机作为飞轮电机。
2.1永磁无刷直流电机的结构
如图1所示为永磁无刷直流电机的组成框图,它主要包括三大部分:电机本体(定子、转子)、转子位置传感器和电子换相线路。在无刷直流电机中,位置传感器实时监测转子的位置并把数据变换成相应的数据信号,由电子换向线路分析并控制电枢绕组连接的相关功率器件的通断以实现换相。
2.1.1转子位置传感器

图1 永磁无刷电机的组成框图
转子位置传感器是无刷直流电机的一个关键部分,其功能就是监测转子磁极的实时位置,确保电子换相线路的正确通断。具体实现也就是将检测到的转子磁极的位置信号变换成相应的电信号,以便于控制定子绕组换相。常用无刷直流电机的位置传感器可分为以下几大类:
(1)电磁式
当土壤介电常数为ε,天线间距为L,地面直达波的传播时间t可以通过对雷达记录剖面的分析来提取,传播速度v=L/t,则有:
其工作原理是根据电磁效应来实现转子位置监测的,分为铁磁谐振电路、开口变压器、接触开关等类型。其具有结构紧凑、输出信号强、环境适应性能强、运行可靠、使用寿命长等优点。这类位置传感器的信噪比较低,较为笨重,且其输出波形通常需要整流后再滤波才可以使用。
(2)光电式
光电式位置传感器是根据光电效应的原理制成的,其主要组成为固定的光源和旋转的遮光板等。遮光板随着转子旋转,而光敏晶体管根据遮光板的旋转不断发出“亮电流”和“暗电流”信号,由此来判定转子磁极的位置。这类传感器的性能相对比较稳定,但对工作条件要求苛刻,输出信号干扰大,寿命短。
(3)磁敏式
磁敏式位置传感器的基本原理为磁阻效应和霍尔效应,常见的器件有磁敏电阻器、霍尔元件等。位置传感器根据永磁转子每转过一对磁极(N、S极)转角,产生与电机逻辑分配状态相对应的开关状态数,以完成电机一个换相的全过程。转子的磁极对数越多,在360°电角度内完成换相过程的次数也就越多。磁敏式位置传感器具有结构简单、体积小、易于一体化安装等优点。常用的霍尔集成电路为US1881等。
2.1.2电子换向电路
在直流无刷电机中,电子换向电路主要由位置传感器的信号处理单元和功率逻辑开关控制单元组成,控制着定子上各相绕组的通断顺序。它的功能是处理位置传感器检测的转子位置信号,并按照一定的顺序输出电信号,控制着相应功率开关器件的导通或者关断。电枢绕组每换相一次,其磁状态就变化一次,那么在电机的工作气隙内,就会产生一个跳跃式的旋转磁场,驱动转子不断地旋转。因此,正确换相才能保证无刷直流电机可靠运行。
电子换向电路可分为桥式和非桥式两类,虽然其与电枢绕组的联结方式多种多样,但是最常见的为三相星型全控状态和三相星型半控状态。大多数的电子换向电路采用的是晶闸管器件,但其实现关断要借助于电流过零点或者反电动势,并且由于该开关器件的频率较低,限制了其适用于逆变器的范围。随着新型可关断全控型器件的发展,电子换向器件多采用功率管MOSFET或IGBT构成,其优点为开关频率高,控制简单,可靠性高等。
2.2永磁无刷直流电机的工作原理
无刷直流电动机(BLDCM)是指内部磁场为梯形波,定子绕组电流为方波的永磁无刷直流电动机。可看作是一台用电子换向装置取代机械电刷的直流电机。如图2所示为无刷直流电机的工作原理框图:由电子换向线路根据监测到的相应主转子位置信号,并以此来驱动与电枢绕组相连接的功率开关器件,控制并驱动永磁转子不断地旋转。
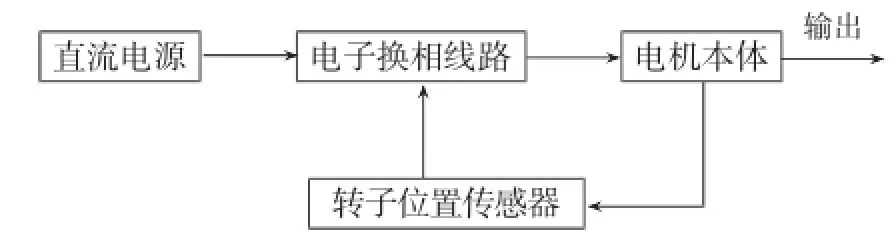
图2 永磁无刷电机的原理框图
电机控制电路可分为三相全控电路、三相半控电路两种。三相半控电路结构简单,但电路的利用率较低,因为在一个电周期内每个电枢绕组只有1/3周期是通电的,而另外的2/3周期时间内是处于断电的状态,显然没有充分利用,且运行中转矩波动也较大。因此,本文选用三相全控式电路,以功率器件两两导通的三相六状态的控制电路为例来具体化说明。图3为一种三相逆变桥与Y形电机绕组接法的控制电路图。

图3 三相逆变桥与Y型电机绕组的控制图

图4 无刷直流电机的正反转换相逻辑关系图
整个系统的工作过程如下:由霍尔传感器监测电机转子磁极位置的信号,发给控制电路并逻辑变换,生成6路驱动信号控制逆变电路功率开关器件的通断,进而调节驱动电机三相绕组的电压波形,使电机按照某一方向持续旋转。无刷直流电机的正反转换相逻辑关系图如图4所示,整个逆变电路在一个周期内逻辑导通顺序为:HB→LC,HB→LA,HC→LA,HB→LB,HA→LB,HA→LC…。
2.3无刷直流电机的控制
为了更好地控制无刷直流电机,本文采用锁相环控制方法并结合双模速度控制方法来控制电机的运作。
锁相环的主要作用是保持反馈信号与给定的基准值同步,采用该方法能够稳定且高精度地控制电机的速度。锁相环系统是基于转速和反馈转速间相位或频率的差异来矫正电机转速。因此只需要设定精度较高的基准信号频率,系统的稳定精度就可提高。结构上一般由鉴频鉴相器(PFD)、低通滤波器(LPF)和压控振荡器(VCO)组成,其工作原理如图5所示。

图5 锁相环内部结构原理图

图6 锁相环电机控制原理框图
如图6所示,锁相环稳速模块可实现鉴相器和低通滤波器的功能,故可由无刷直流电机、电机驱动装置、逆变器和转子位置检测装置共同组成带有惯性的电压控制振荡器(VCO)。
由于常规的速度环与电流环构成的双闭环控制系统,不能满足磁悬浮飞轮用无刷直流电机的高精度控制要求,因此,必须基于电流环与高精度锁相环两部分采取双模的速度控制系统,实现电机的转矩运行以及高精度高转速运行,其双模速度控制原理框图如图7所示。
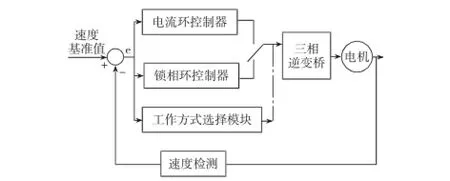
图7 直流电机速度控制系统结构框图
首先设定一个速度基准值参数,当速度反馈值与速度设定值的差值大于设定的基准值偏差时,电机处于电流环控制器作用下,控制电机相应的加速或减速,并快速向速度锁定值靠拢。当速度反馈值与速度反设定值的差值小与基准值偏差时,电机处于锁相环控制器作用下,完成飞轮用无刷直流电机的高精度控制,并且使用相应的外围模块电路,以增强控制系统的抗干扰性能。
3 基于锁相环和双模速度控制的无刷直流电机的仿真分析
本仿真采用Mathworks公司的MATLAB作为仿真工具,利用Simulink中的Power System模块来搭建模型,构成无刷直流电机的转速及电流的双闭环直流调速系统,该仿真模型如图8所示,由晶闸管-直流电机组成的主电路和转速电流调节器组成的控制电路两部分组成。主电路部分主要包括:交流电源模块、晶闸管整流器模块、触发器模块、电机模块以及移相控制环节。而控制回路部分主体为:转速调节器、电流调节器、反馈滤波环节。
图8所示模型中电流反馈和转速反馈量,是采取监测到的电流端输出信号和电机转速的信号。电流调节器(ACR)的输出端连接移相特性模块(Shifter)的输入端,因此ACR的输出幅值就限制了控制角αmin和αmax的值。

图8 转速、电流组成的双闭环直流调速系统仿真模型
系统的主要参数如下:电源(峰值180V,50Hz)、电动机(Ra=0.21Ω,La=0.00021h,U=220V,R=146.7Ω,L=0,La=0.84H,J=0.57kg·m2)、转速调节器PI-ASR (Kpm=10.49,Kn=1/0.0083)、电流调节器PI-ACR(Kpi=2.48,ki=1/0.0268)、电抗器(Ldl-4=0.002H,Ld=0.015H)。
仿真结果见图9-12。其中图9为电流响应曲线,图10为电枢端电压波形图,图11为电机转矩变化的曲线,图12为转速变化曲线。

图9 电机电流响应曲线
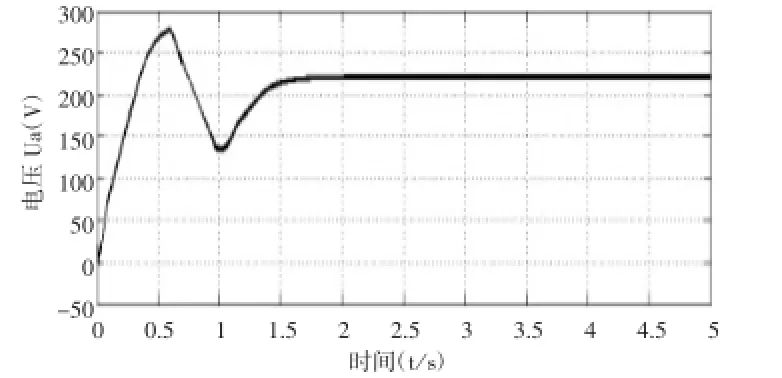
图10 电枢端电压波形图
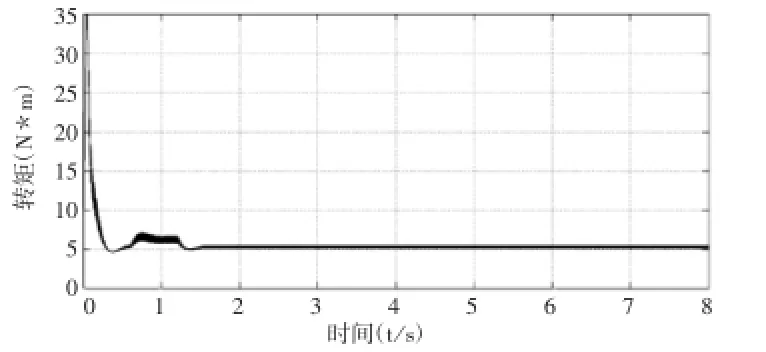
图11 电机转矩变化的曲线
从电机转速和电流的波形可以看出:启动阶段,电动机以恒流起动,经过0.4s后启动过程结束,电枢电流下降并最终为零,电机的转速上升到最大值,且大于6000r/min,此时电动机转矩也为零,又因为是理想的空载启动,所以电动机维持在最高转速;0.5s后加上负载,电动机转速产生波动并下降,此时电流环发挥调节作用,使电动机的转速稳定在给定值。从总体上看,仿真结果显示良好;从调节来看,动态结构图的仿真调节效果十分迅速。以上模型为电动机空载启动,如果带上负载启动,情况基本相同。
4 结束语
本文分析了无刷直流电机的结构、工作原理、等效电路等,提出的基于锁相环和双模速度的双重控制方法,在锁相环的基础上增加了速度环,给出了该控制方法的控制框图和仿真模型图,利用Matlab仿真平台搭建出相应的仿真模型进行仿真,仿真结果表明该控制方法具有良好的稳定性和较高的速度控制精度,大大改善了传统速度电流PI调节器在无刷直流电机大惯量负载中存在的转速波动等问题。
[1]白雷石,杨华.基于DSP的无刷直流电动机控制系统[J].电气传动自动化,2002,24(2):12-14.
[2]刘翔.一种基于TMS320F2812的软件锁相环实现方法[J].电力电子技术,2010.
[3]彭飞.基于DSP的无刷直流电机控制系统设计[A].国防科学技术大学工学硕士学位论文集[C].2004.
[4]刘海亭.无刷直流电机启动过程仿真研究[R].天津工业大学信息与通信工程学院,2012.
[5]朱晓强.直流无刷电动机控制系统设计与仿真研究[J].天津职业技术师范大学学报,2011.
Study of the permanent magnet brushless DC motors based on phase-locked loop and dual mode speed control
XU Chun-lei,HAN Chang-yuan (Aksu Power Supply Co.,Ltd.,State Grid Xinjiang Electric Power Corporation,Aksu 843000,China)
The brushless DC motor has high torque-current ratio,high speed,good dynamic performance,high reliability and easy to control properties,so it has been widely using in medium and small power drive occasions,but it has disadvantages of large torque ripple and easy to cause speed fluctuation.At present,the speed-current double closed loop PI control is widely used.When brushless DC motor used in the speed control mode with large load rate and big inertia,it may cause shock,resonance and noise problems due to unstable speed.The phase-locked loop and dual-mode speed control method is given.By using the phase-locked loop and speed loop,the rotational speed fluctuation problem of the traditional speed-current PI regulator in the brushless DC motor big inertia load is effectively improved.The system has good speed control precision and high stability in practical applications.
brushless DC motor;speed fluctuation;phase-locked loop;dual mode speed control
TM301
A
1005—7277(2016)01—0021—04
徐春雷(1987-),女,汉族,硕士研究生,国网阿克苏供电有限责任公司员工,主要从事继电保护工作。
2015-09-22
