伸缩臂起重机液压控制的新趋势>
2016-08-31孟兆生岳彩霞
孟兆生,岳彩霞
(1.黑龙江工程学院,黑龙江 哈尔滨 150050;2.黑龙江工程学院 教育发展与改革研究中心,黑龙江 哈尔滨 150050)
伸缩臂起重机液压控制的新趋势>
孟兆生1,岳彩霞2
(1.黑龙江工程学院,黑龙江 哈尔滨 150050;2.黑龙江工程学院 教育发展与改革研究中心,黑龙江 哈尔滨 150050)
从对现代化大型系列越野轮胎起重机的运动性能、起重性能和附加的要求出发,针对小型和大型两种起重机进行分析,给出主控制和回转机构控制的控制方案及发展趋势。
伸缩臂起重机;液压控制;新趋势
自行式伸缩臂起重机一般来说不能被视为典型的建筑机械,它们一般都不具有或只具有有限制的按交通法规发给的公路行驶许可。它们经常只被应用在装卸转运站。通常,在起重机领域中,分为野外起重机和公路起重机。这种划分随着时间的推移正被逐渐取消。在欧洲没有公路行驶许可的纯建筑工地用起重机仅在低吨位等级(50 t)应用,而且还有下降的趋势[1]。起重机经营者和出租商间接地支持了这种趋势。他们试图用较少品种的起重机覆盖所有用户要求的工作范围。这些只有使用既可在野外又可在公路应用的全路面机械才能实现。在停车时间缩减的同时,机器使用率在提高。
高新技术在另外的两个主要市场(欧洲除外)北美和亚洲的发展也显示了同样的趋势。纯公路起重机被全路面起重机取代。越来越多地采用全路面起重机,特别是大吨位等级,在过去的几年间表明这种发展趋势紧跟欧洲的发展之后。
对于起重机运动性能的要求:
1)全路面起重机允许在公共陆路交通中行驶,可以在短时间内独立变更工作地点;大吨位伸缩臂起重机(500 t)也可以达到最高60 km/h的时速,并且不受限制地参与公路交通。
2)特殊底架的设计使其在地面上的自由度增大,以便在建筑工地方便地抵达自己的工作位置[2]。
对于一个现代化的起重机,起重营运很重要的功能如起升机构、伸缩臂系统和变幅机构具有如下要求:
1)通过轻型结构减少费用,并且在保持起升负载不变的情况下节省自重(较少的轴数);
2)最佳的功率利用程度;
3)应用高压部件以缩减工作部件的尺寸(液压缸,马达);
4)应用集成单元,如带有内装负载转矩极限阀(LMB)、快进功能和控制油供给;
5)有扩展能力的系统用于附加功能,如辅助起升机构;
6)快进控制用于起升机构和变幅机构。
这些要求与起重机的吨位等无关,并且可作为项目设计的基础框架应用。另一个在系统和部件选择时的一个重要因素是大起重机和小起重机,当然分类界限是连续的。
1 小起重机
作为小起重机习惯上是以在最小伸距时起升重量为50 t的伸缩臂起重机。这种起重机为系列化生产。一个典型特征是在底架上应用了柴油机,它被应用于行走驱动,用于起重机控制的液压功率,包括在行走传动功率之内,同时柴油机的副驱动具有足够的功率通过一个分配变速器或者直接驱动液压能源[3]。
底架和上架之间的液压链接元件旋转传动装置使得这些成为可能。即在上架中没有必要设置第2台柴油机作为起重机控制的能源。
底架液压执行元件,如轴弹簧、液压多轴转向和支撑都由液压泵直接供油。旋转传动装置所需的通道及其规格大小由系统确定[4]。
目前还需要满足的附加要求是:1)高功率密度;2)单人运作;3)短装调时间;4)随带最大的配重;5)在驱动转速降低的情况下液压功率可用性(如在居住区)。
这些要求可以通过不同的系统来实现,下面给出即将使用的控制方案(见图1)成为趋势[5]。
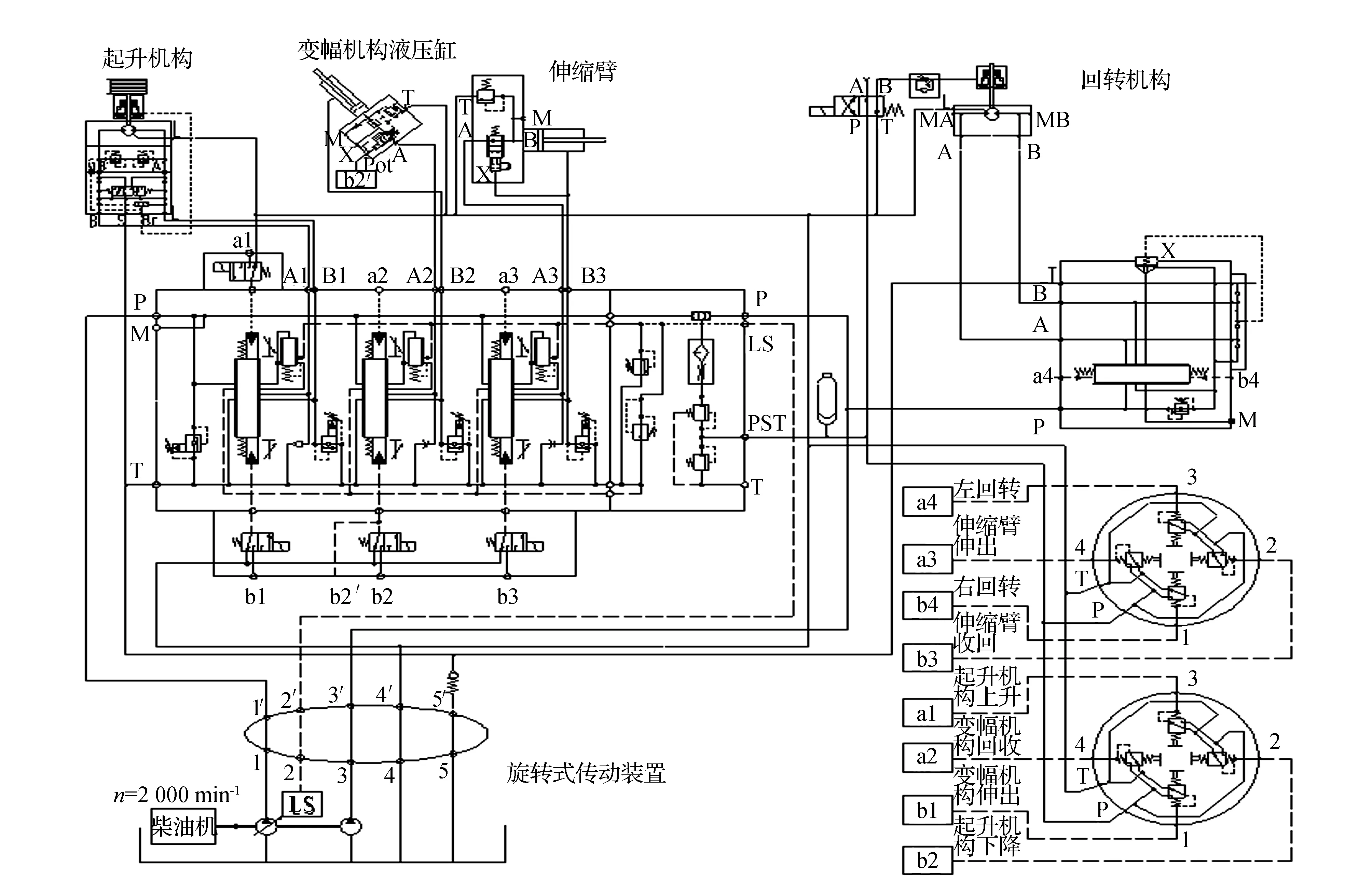
图1 小起重机的负载敏感方案
负载敏感或LUDV(负载独立分配系统)控制在过去的几年中已经在起重机范围被使用。其优点是:
1)具有重复性的灵敏控制;
2)大灵敏度控制范围通过递增式控制曲线;
3)集成式液压系统(单泵回路系统)是系统设计的重要准则。
从15~50 t的不同吨位等级的起重机对换向阀流量和工作压力有不同的要求。在中压范围有多种结构型式可用[6]。高压区域由夹层结构覆盖。两种高压结构型式具有在起重机范围极具意义的特点:
1)LMB关闭阀直接安装在控制块的夹层元件上。泄露油在内部被导向连接于邮箱的无压力泄油口。
2)控制油供油源集成于入口元件或出口元件之内。因此,不再需要一个独立的控制油泵。
3)最大压力极限由负载报警通道上的每个执行元件接口完成。当达到事先调定的最大压力值时,负载报警信号限制了液压泵。其摆角向回摆动,并且只输送能达到这个压力的流量。由此避免了不必要的转换成热的损失[7]。
在大流量时,M7控制块(LUDV,Q=240 L/min)作为3轴多路换向阀被应用,它借助于夹层元件可以进行扩展,由此提供了将控制油供给和LMB关闭阀集成于控制块的可能性。
所需的起升机构和变幅机构的快进回路可以通过影响压力平衡阀或者通过改变控制阀芯的递增式特性曲线(Qmax快进行行程流量)而达到[8]。
系列A10VO和A1VO的液压泵是以部分负载运作而敷设的。各专用压力平衡阀完成各部分的负载补偿任务,在要液压泵提供所需的流量时,不能通过驱动转速来提高执行元件的速度。LS(负载敏感)系统和LUDV系统以相同的方式工作。在供油不足时,例如,柴油机空转时,在LS系统中将减小流向最高负载的执行元件的流量。
根据供油不足的程度,这种流量减少可以直至执行元件静止不动。这个缺点通过LUDV系统可以将其去除,因此,在此系统中所有执行元件的流量都按比例被减少。
在诸如居住区内以较低的柴油机转速工作时,供油不足的现象将会提早出现。虽然如此,司机仍然可将全部精力都集中在负载和它的运动上,因为压力平衡阀会自动向回调节而不需要在先导控制杠杆上进行修正(比较LS系统)。
2 大起重机
对大起重机的要求大体上与小起重机相类似。整个方案设计是以更改过的条件为基础的。车辆的尺寸和静力学主要是由动臂的长度及起升高度确定。所要求的回转半径由多轴转向达到。较大的吊重要求所有运动都有一个最佳的灵敏控制,以避免在回转过程中的摆动。
采用1台独立的柴油机作为液压能源A8VO及A10VO的动力源是另一个显著的区别。通过将其设置在上架上,可以将它的重量作为配重使用。主、副输出都可以为液压泵的驱动使用。斜盘泵A11VO使100%通轴传动串联配置成为问题。因此,在这里不强迫需要一个泵分流器。短软管及管道也对整个系统有好的作用[9]。
底架的液压功能(支撑、转向、弹簧)都由一个旋转装置供油,并且在驾驶室进行操作。
对灵敏控制的高要求通过泵控制能最好地得到满足。
泵控制是一种与负载无关的系统,在此流量取决于:
1)泵的行程排量,这可以利用摆角的液压调整而确定;
2)泵的转速。
泵的行程排量相应于灵敏控制的范围。而驱动转速则确定了控制曲线的斜率(见图2)。在泵和执行元件之间接有简单的控制块。它们作为开关阀只给定运动的方向(6通原理)。这套简单的系统只以很小的损失工作。损失只是管路损失和阀口损失。而与相比的LS或LUDV系统则有很大的能量转换成热能的损失,因此,在此系统中各部分的压力平衡阀必须平衡多个执行元件的不同压力,以达到与负载无关进行工作的目的[10]。
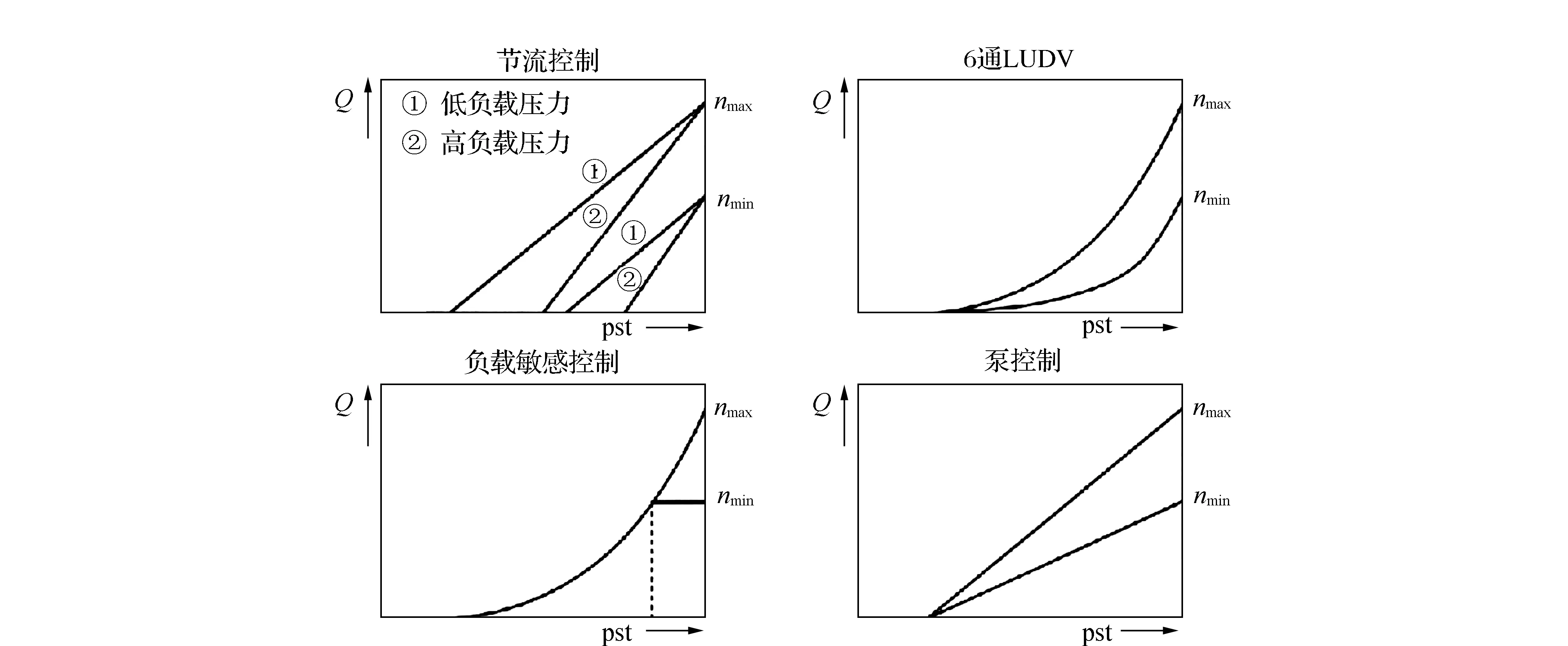
图2 不同方案的控制状况
这种在能量技术上占有优势的系统要求对每个同时工作的执行元件要配备1台独立的泵。一个3泵系统(见图3)是在这个范围中达到好的起重机控制的先决条件。同小起重机一样,回转机构有自己单独的回路操纵。两台泵可供伸缩臂液压缸、变幅液压缸、起升机构及辅助起升机构使用。利用通径16~32的M8控制块可以实现下述元件的同时操作:
1)起升机构(及辅助起升机构)和变幅机构;
2)两个起升机构;
3)经由泵合流的它们的快进。
这个控制块的液压控制要求一个逻辑板,以便识别被控制的功能。简化的方式是电液控制阀芯轴。所要求的逻辑联结由电子元件完成,先导控制阀可以同时作为LMB关闭阀使用,泄露油在内部被引走,控制块的内部通道使合流不需外部管道连接,由此减少了安装工作。
泵控制应用在大于70 t承载力的伸缩臂起重机范围[11]。
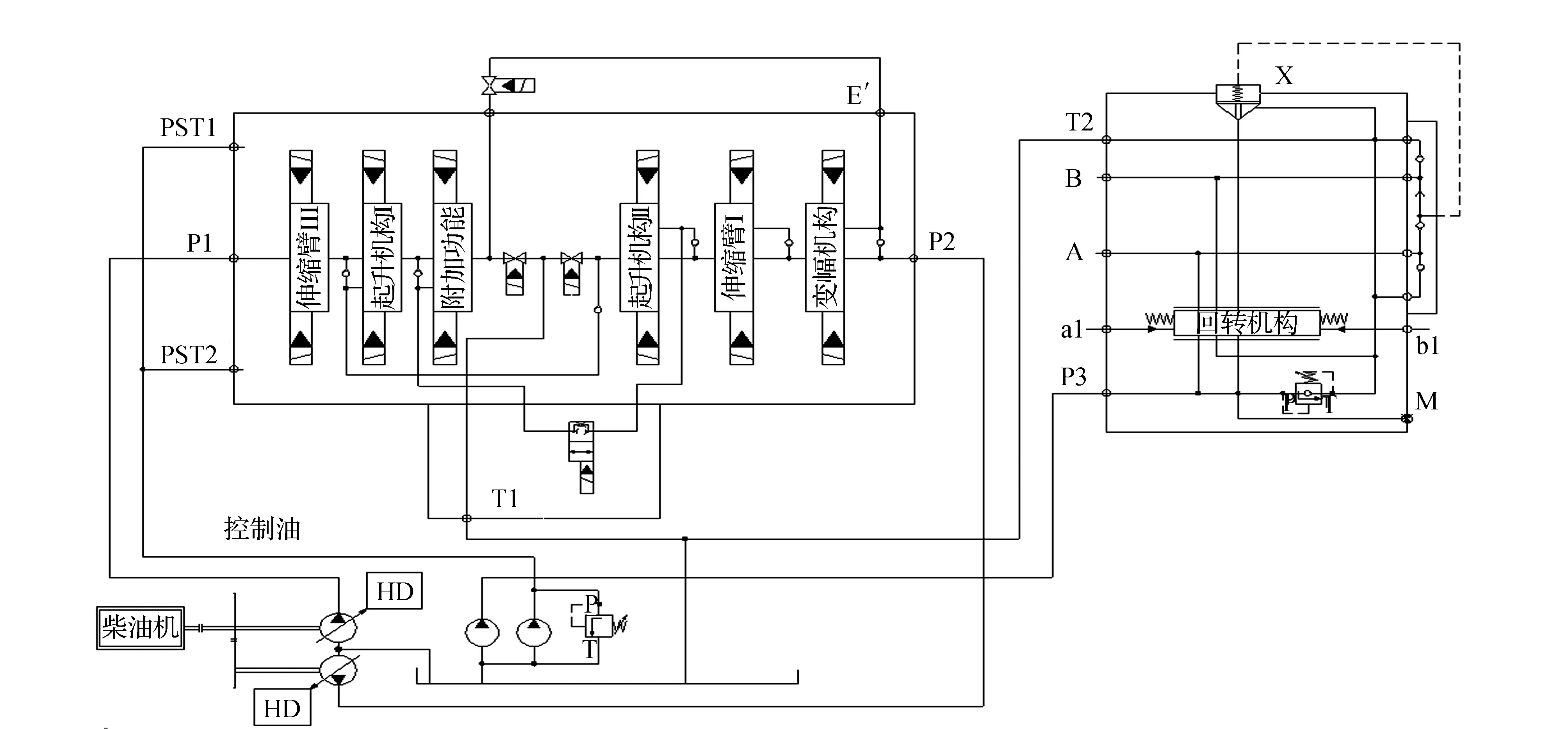
图3 泵控制的控制方案
3 回转机构控制
回转机构控制是评价行走起重机的一个决定性标准。与其它执行元件的负载无关性是最基本的要求。因此,首选独立的液压回路。
在大多数情况下都采用中压范围,在这个范围内可以应用简单的元件,如齿轮泵。转矩、变速器、变速比和回转机构转速决定所应用于回转机构的控制[12]。
1)节流控制。这种典型的系统由定量泵、6通工作原理的控制块和定量马达组成,它根据压力和流量工作。其灵敏控制范围取决于驱动转速和负载压力(见图2)。
2)6通LUDV控制。这种系统与节流控制的区别是后面作用有负载压力的压力平衡阀。测量阻尼孔相对于执行元件和环形槽阻尼孔的压差相等。在流向执行元件的流量增加的同时,通过压力平衡阀的流量则减少。这套系统与负载无关,而且其控制范围可以与泵控制(见图2)相媲美。递增式特性曲线更使灵敏控制范围得到改善[13]。所要求的回转机构的对称式控制可以用这套系统达到。控制的开始给出了与负载和转速的无关性。与定量泵一起可以将这套系统视为技术上和贸易上有意义的方案。
3)泵控制方式同样也适用于回转机构。
4 结束语
从现代化大型系列越野轮胎起重机的运动性能、起重性能和附加的要求出发,针对小型和大型两种起重机进行分析,给出主控制和回转机构控制的控制方案及发展趋势。除上述的主要部件外,还有其他比例液压通风机控制、电缆遥控、集成式放大器、电液柴油机调定等新的开发研究,提高了起重机的总体效果和操作方便性[14]。
未来起重机控制的系统选择必须通过技术和贸易方面的全盘分析才能确定,只单独注重某单个部件将导致错误结果。另外,还要将安装和保养工作考虑在内。
[1]王志强,朱守法,张付义.浅谈伸缩臂式履带起重机现状及发展趋势[J].工程机械与维修,2015(6):52-54.
[2]邱成国,于卫红,孙福.30 t 液压伸缩臂式平台起重机总体设计及应用[J].武汉船舶职业技术学院学报,2015(2):22-25.
[3]刘永平,米勇.全地面起重机超起机构液压系统的改进[J].工程机械与维修, 2015(11).
[4]贺利乐,周亭,闫磊.装载机新型机械传动系统方案设计及节能分析[J].机械设计与制造, 2015(11):181-184.
[5]陈文赢.液压传动系统在工程机械中的应用研究[J].中国机械,2015(19):19-21.
[6]王岩,张永龙,秦绪情,等.车辆静液传动液压系统研究现状及发展趋势[J].机床与液压,2015,43(13):149-155.
[7]简桃凤,李四中,王猛.汽车起重机变幅液压系统性能研究[J].湘潭大学, 2011(1):146-150.
[8]苑兆腾.汽车起重机变幅液压系统及插装平衡阀的研究与分析[D].天津:天津理工大学, 2015.
[9]孟兆生,姜继海,岳彩霞,等.二次调节静液传动混合动力系统再生制动研究[J].黑龙江工程学院学报(自然科学版),2010(2):51-54.
[10] 林闯,费烨.工程机械行走液压回路极限匹配方法[J].建筑机械化, 2015(4):45-46.
[11] 胡均平,朱政宇,李科军,等.液压起重机过载自动控制及稳定性研究[J].计算机仿真,2014, 31(12):224-228.
[12] 刘湘琪,蒙臻,倪敬,等.双马达回转同步驱动系统建模与控制研究[J].中国机械工程,2015,26(4).
[13] 邹乃威,韩平,常胜,等.装载机静液-机械无级传动系统数学建模及实例分析[J].中国工程机械学报,2015(2):95-102.
[14] 徐建超,谭超.大吨位伸缩臂履带式起重机液压系统设计[J].液压与气动, 2011(8):90-93.
[责任编辑:郝丽英]
A new trend of hydraulic control on the telescopic boom crane
MENG Zhaosheng1,YUE Caixia2
(1.Heilongjiang Institute of Technology, Harbin 150050, China;2.Education Development and Reform Research Center,Harbin 150050, China)
Combined with moving properties, loading properties and the other requirements of a modern large wheel type off-road crane, this paper proposes two control schemes, including main control and rotation mechanism control, analyzes the cranes in large and small types and presents the developing trend.
telescopic boom crane; hydraulic control; new trend
10.19352/j.cnki.issn1671-4679.2016.04.011
2016-01-09
孟兆生(1964-),男,教授,研究方向:机械工程.
TH137
A
1671-4679(2016)04-0051-05