行星轮越障运货车设计与分析
2016-08-31陈凯旋邓传奇
陈凯旋,邓传奇,张 敏,伍 广
(安徽理工大学 机械工程学院,安徽 淮南 232001)
行星轮越障运货车设计与分析
陈凯旋,邓传奇,张敏,伍广
(安徽理工大学机械工程学院,安徽 淮南 232001)
针对崎岖地况上的运输问题,设计出一种行星轮越障运货车,由蓄电池、电机、行星轮、车厢、减速器、传动轴、调平机构等部件组成,选取爬楼工况对行星轮进行越障能力计算,通过计算结果确定电机选型,由电机输出功率计算出传动轴、减速器等主要零部件尺寸,整车后方安装调平机构实现转向和调节重心,在结构设计完成后,借助SolidWorks对整体结构进行三维建模,用有限元分析软件ANSYS Workbench 对主要零部件进行线性结构分析,结果表明车厢、传动轴符合强度和刚度要求。
行星轮;越障运货车;结构设计;三维建模;有限元分析
目前,多数的运货小车只能适用于平坦道路,不具备翻越障碍物的功能,在低层居民楼、建筑工地和其他一些路况恶劣的野外山区进行货物运输时势必会造成大量的人力、物力的浪费。为此,本文设计出一种能够适用于平地和山地两种路况的行星轮越障运货车。
1 结构设计
1.1总体结构概述
行星轮越障运货车采用电机驱动,供电装置为5块12 V的蓄电池。如图1所示,行进机构采用行星轮,行星架形状呈“Y”型,三支叉角度均为120°。车厢的厚度为2 mm,长宽高为1 200 mm×850 mm×500 mm。选用普通圆柱齿轮减速器,电机带动齿轮转动,齿轮通过传动轴带动行星轮绕轮系中心转动,3个轮子轮番着地,实现越障功能。在运货车后方安装调平机构,调平机构由万向轮和螺杆组成,万向轮能够自由地转向,在行星轮翻越大障碍物的过程中,车厢前部会翘起,为了保证整个车体和车内物品的平衡,需要利用车厢后方螺杆的升降调整车体的重心,图2为运货车的结构简图。
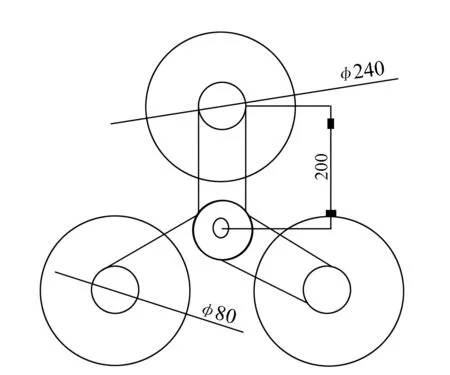
图1 行星轮结构
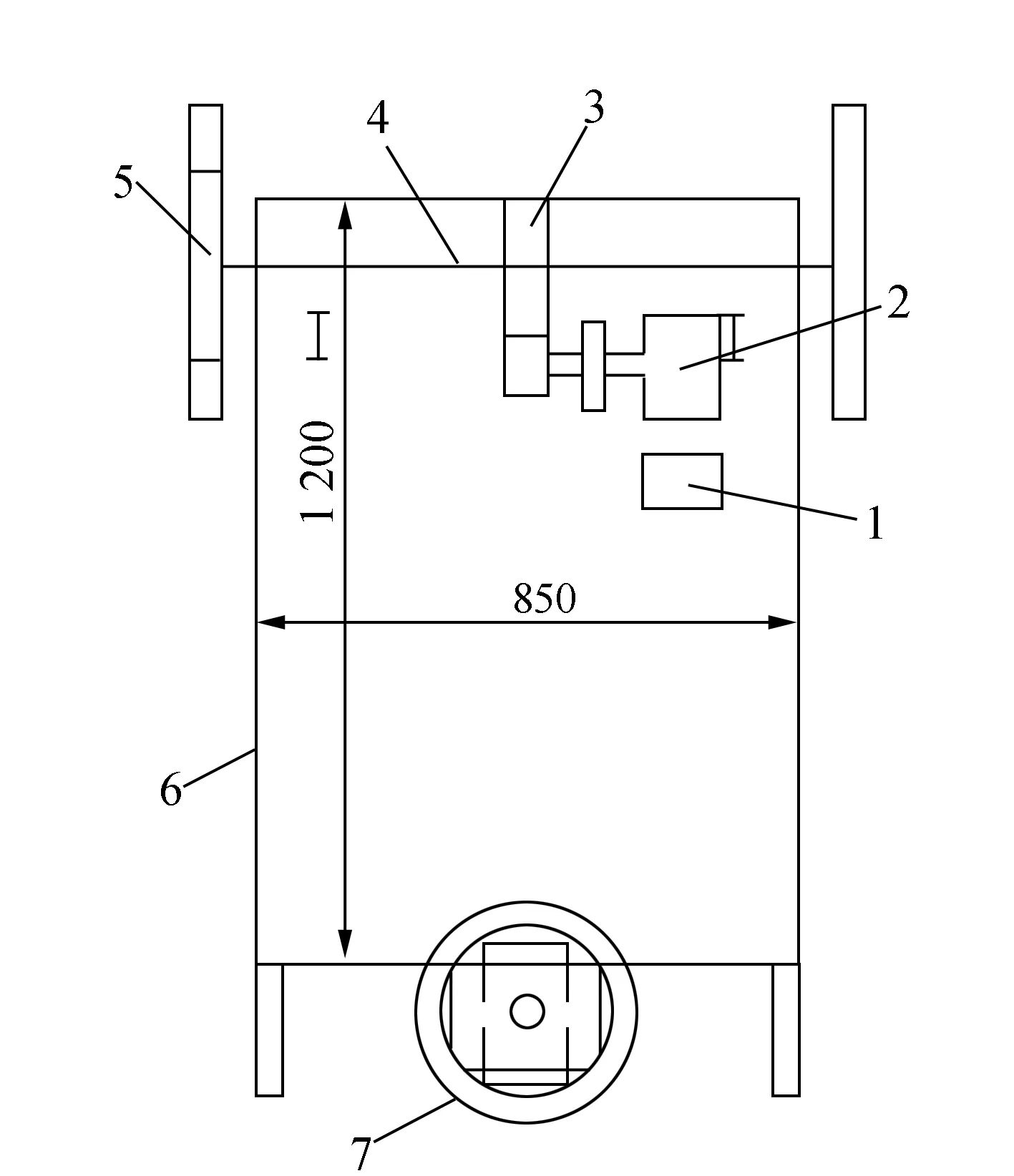
1—电池;2—电机;3—齿轮;4—传动轴;5—行星轮;6—车厢;7—调平机构图2 运货车结构
1.2轮子受力计算
车体的净重为30 kg,运货车的额定载重量为170 kg,G=(30+170)×9.8=1 960N,如图3所示,A处为万向轮受力FA,B处为行星轮系中心受力FB。
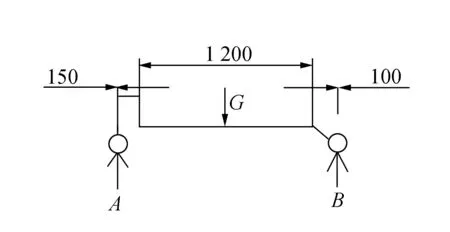
图3 运货车受力(mm)
在车体的后方只有一个万向轮受力,在前方有两个行星轮系承重,所以,在竖直方向上,有
FA+2FB=1 960N.
对点A由MA=0可得:
G×(600+150)=2×FB×(1 200+100+150).
计算得:
FA=946N,FB=507N.
1.3行星轮驱动力计算
取爬楼工况进行越障力计算,如图4所示,已知a=507N,对点B列力矩平衡方程 T=G·a·cosθ,当θ<90°时,驱动转矩主要克服重力阻力矩,当θ=0°时 ,T=507×0.2=101.4N·m。根据市面上爬楼轮椅的行进速度,取行星轮转速n2=20 r/min,在某电机生产厂家找到一款额定功率为0.55 kW,输出转速为n1=23 r/min,输出扭矩为218 N·m,传动比为61.62的减速电机能够满足使用要求。
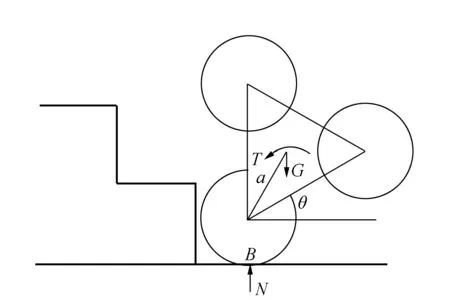
图4 行星轮越障示意图
1.4传动轴的设计
查文献[4]得圆柱齿轮传动的效率为0.97,已知电动机输出扭矩为218 N·m,齿轮传动比:i=n1/n2=1.15。
传动轴输入转矩:
T=218×1.15×0.97=243.2N·m.
传动轴所传递的最大功率:

根据文献[1]取C=110,所以传动轴最小直径:
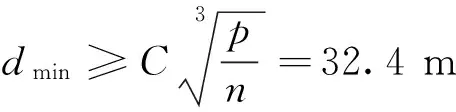
对于d≤100 mm的轴有两个键槽时,轴径应增大10%~15%,因此,d=32.4×1.1=35.6 mm。
经过圆整取得:dmin=36 mm。
传动轴各段轴径如图5所示。
1.5减速器设计
由于运货车行驶速度不高,选用8级精度的齿轮,小齿轮材料选用40Cr,调质处理,硬度为250HBS,屈服极限为500 MPa;大齿轮材料选用45号钢,调制后表面淬火,屈服极限为360 MPa,硬度220HBS,大小齿轮硬度差为30HBS。选小齿轮齿数Z1=21,则大齿轮齿数:Z2=1.15×21=24.2,取Z2=25,按齿面接触疲劳强度设计,直齿圆柱齿轮减速器设计尺寸如表1所示。

图5 传动轴结构
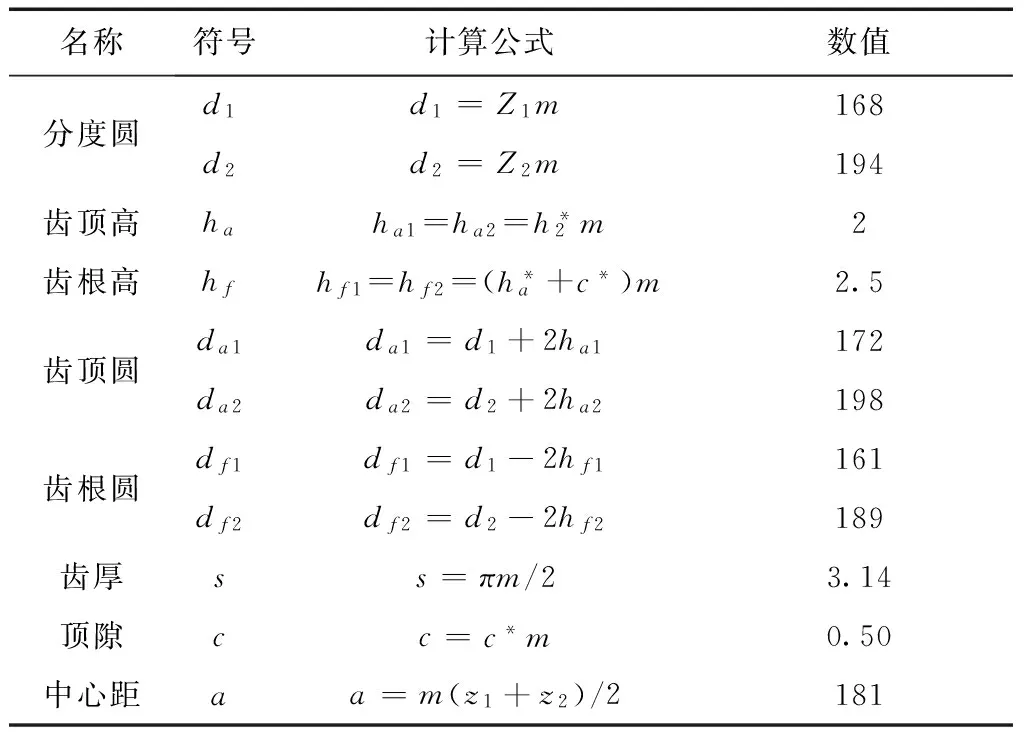
mm
2 结构建模
利用三维建模软件SolidWorks对行星轮越障运货车各零部件进行建模并装配,所建装配体模型如图6所示。
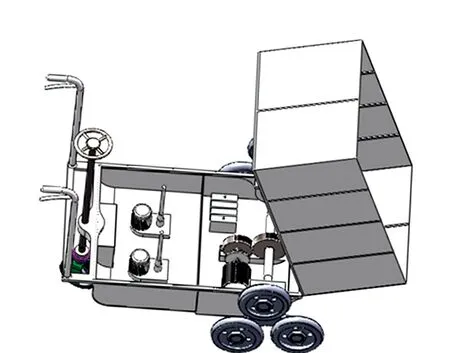
图6 越障运货车三维图
3 车厢与传动轴有限元分析
将SolidWorks所建的车厢模型通过无缝接口导入到ANSYS workbench平台当中,对其进行静力学分析,采用solid187单元,设置车厢材料为结构钢,设置车厢底部网格尺寸为10 mm,设置其余部分网格尺寸为20 mm,然后采用Automatic method生成网格,最终网格模型节点数为235 976,单元数为118 935,对车厢底部施加1 700 N的静载,方向垂直底面向下,设置车厢四周的加强筋为固定约束,进行求解,求解结果如图7、图8所示。
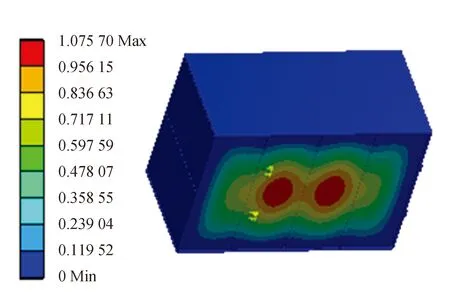
图7 车厢整体变形云图(mm)
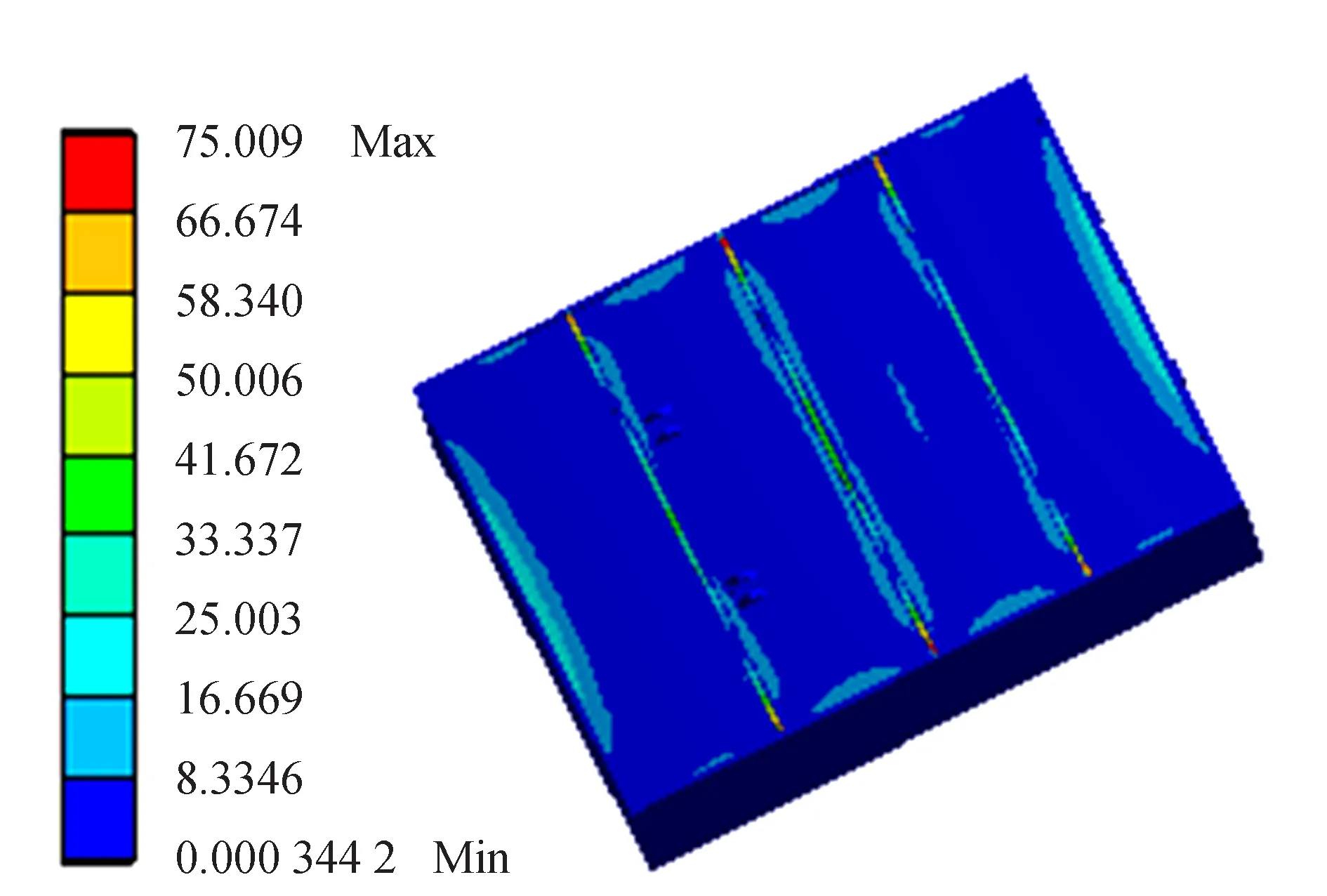
图8 车厢等效应力云图(MPa)
将传动轴模型导入到ANSYS Workbench中并建立静力学分析模块,设置材料为结构钢,设置网格尺寸为3 mm,在齿轮连接处添加243 000 N·mm 力矩载荷,在轴承连接处设置固定约束,分别在轴的两个末端半圆面设置力载荷,方向竖直向下,大小均为507 N。轴的材料选用的是45号钢,由于轴承受的载荷不大,转动速度较小,许用应力能够满足使用要求,因此,只对刚度和挠度进行校核,分析结果如图9、图10所示。
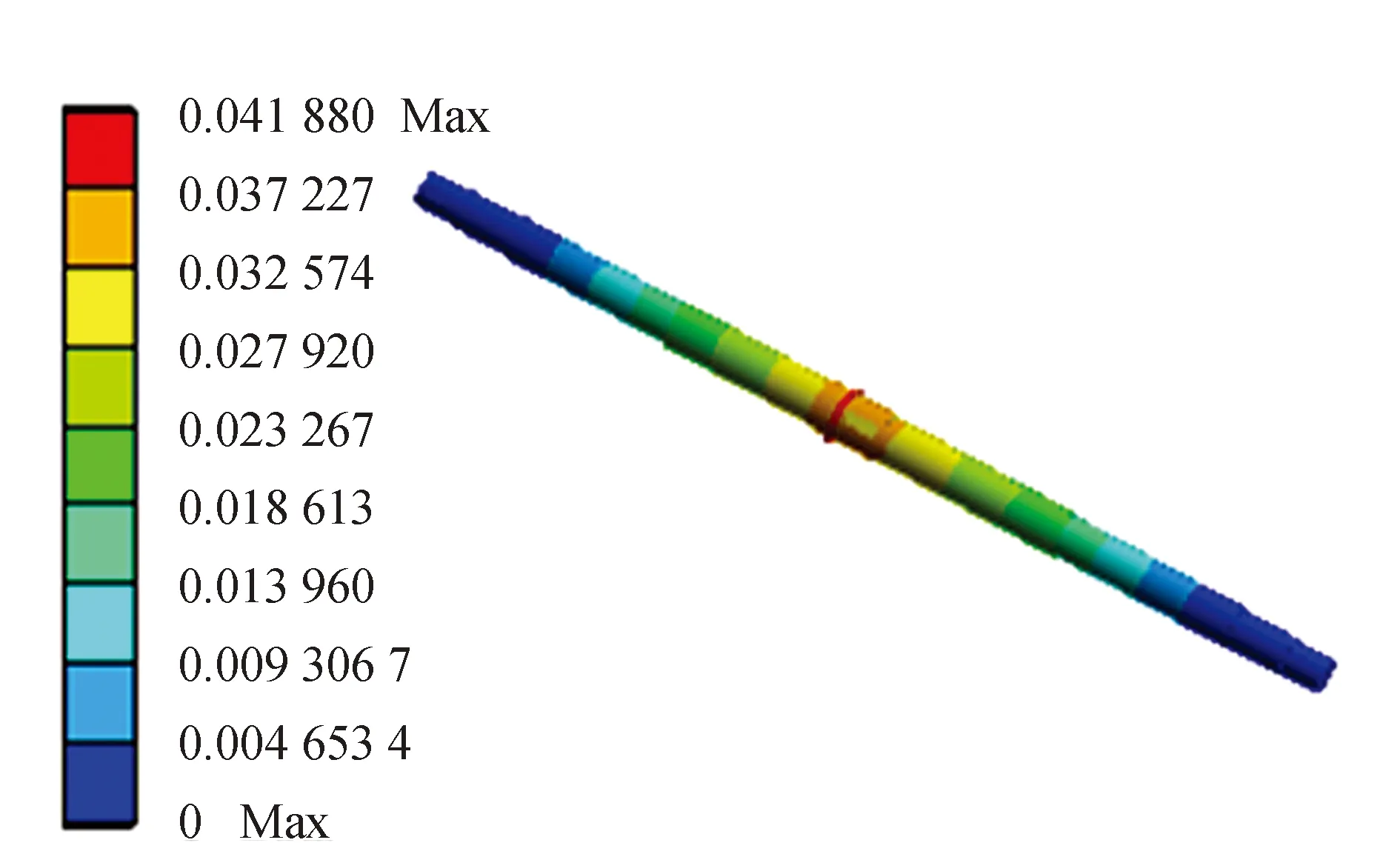
图9 传动轴整体变形云图(mm)
图10 轴端在Y轴方向变形云图(mm)
4 结果分析
1)由图7可以看出,满载时最大变形为1 mm,最大变形出现在厢底中心处,区域呈“∞”形,约占厢底面积的1/5,厢底由四周向内变形缓慢增大,变形为0.6 mm的区域约占总面积的1/2,变形量较为微小,车厢结构满足刚度要求。
2)由图8可以看出车厢最大等效应力出现在底部加强筋的末端,应力值为75 MPa,低于材料的许用应力235 MPa,故车厢的材料强度符合要求。
3)由图9、图10可知,来自减速器的扭矩对传动轴中部产生了0.04 mm的变形量,所产生的变形量比较微小。传动轴末端承受了来自车厢的压力,在竖直方向(Y轴方向)产生的变形量约为0.003 6 mm,大齿轮的法面模数mn=2 mm,传动轴允许挠度y=(0.01~0.03)mn=(0.02~0.06) mm>0.003 6 mm,故传动轴刚度符合要求。
[1]吴昌林, 金强, 赵青. 行星轮式爬楼梯轮椅的越障能力分析[J]. 机械设计, 2010, 27(1): 48-52.
[2]孙桓, 陈作模, 葛文杰. 机械原理[M]. 北京:高等教育出版社, 2006:174-186.
[3]苏和平,王人成.一种双联星形轮机构电动爬楼梯轮椅的设计[J].中国临床康复,2005,9(26):144-145.
[4]任济生,唐道武,马克新.机械设计课程设计[M].徐州:中国矿业大学出版社,2008.
[5]李雅姝.平稳爬楼车[P].中国专利:201120406669.2, 2012- 07-04.
[6]国家质量监督检验检疫总局.渐开线圆柱齿轮精度:GB10095-88[S].北京:中国标准出版社,2001.
[7]魏敏,张宏文,朱洪.基于Ansys有限元仿真采棉机齿轮箱中间轴的强度分析[J]. 制造业自动化, 2013, 35(11): 27-29.
[8]李先鹏,陈光阔,韩兴昌,等. 扭矩轴类零件有限元分析方法探讨[J].制造业自动化, 2015, 37(4): 86-87.
[9]陈岚,赖成,唐俊.基于ANSYS/LS-DYNA的行星轮系传动系统瞬态动力学分析[J].河南科技, 2013, (9): 222-223.
[10] 戚国盛.行星轮系传动设计中的角速度计算[J]. 台州师专学报, 2000, 22(6): 37-39.
[11] 安琦,顾大强.机械设计[M].北京:科学出版社,2008.
[12] 国家质量监督检验检疫总局.标准尺寸:GB2822-81[S].北京:中国标准出版社,2005.
[13] 经来旺,陈国平.工程力学[M].武汉:武汉理工大学出版社,2008.
[14] 程爱明,赵自强,张春林.行星轮系的机架变换与传动比变化规律的研究[J]. 机械设计, 2009, 26(11): 58-59.
[15] 于冠英,李承山.球磨机小齿轮轴的有限元分析[J].有色矿冶, 2011, 27(3): 78-79.
[16] 王一博,卿铜,刘博文.两轮自平衡代步滑板的机械结构设计与有限元分析[J]. 黑龙江工程学院学报, 2015, 29(4): 22-23.
[责任编辑:郝丽英]
Design and analysis of handbarrow for climbing obstacles
CHEN Kaixuan,DING Chuanqi,ZHANG Min,WU Guang
(School of Mechanical Engineering,Anhui University of Science and Technology,Huainan 232001, China)
Aiming at the transport problems on the rugged ground, a kind of handbarrow for climbing obstacles has been devised,which consists of battery,motor, planetary gear, compartments reducer, drive shafts,leveling mechanism and other components. The obstacle capacity is calculated according to the case of climbing stairs. The moto is selected by rated load, and the size of the drive shaft,the gear unit and other major components are calculated by the output power of the motor. The leveling mechanism is installed in the rear of the vehicle to achieve the steering and adjust the focus. After the design is complete,SolidWorks is used to create a three-dimensional model and make linear structural analysis for main components with finite element analysis software called ANSYS Workbench. The results show that compartment and drive shaft can meet the requirment of the strength and stiffness.
planetary gear;handbarrow for climbing obstacles;structural design;three-dimensional modeling; finite element analysis
10.19352/j.cnki.issn1671-4679.2016.04.010
2016-03-01
陈凯旋(1992-),男,硕士研究生,研究方向:矿山机械.
TH122
A
1671-4679(2016)04-0047-04