基于卡尔曼滤波的优化GM(1,1)模型在建筑物沉降预测中的应用
2016-08-31蒋涛
蒋 涛
(1. 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000;2.河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
基于卡尔曼滤波的优化GM(1,1)模型在建筑物沉降预测中的应用
蒋涛1,2
(1. 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作 454000;2.河南理工大学测绘与国土信息工程学院,河南 焦作 454000)
为了提高灰色GM(1,1)模型的抗扰动能力和预测精度,运用卡尔曼滤波对原始沉降数据进行滤波去噪,并重新构建灰色GM(1,1)模型的背景值,建立基于卡尔曼滤波的优化GM(1,1)模型。以某建筑物实测沉降数据为例,进行新模型、传统灰色GM(1,1)模型和优化的GM(1,1)模型的计算比较,结果表明,新模型不仅可以有效剔除监测数据中的随机噪声, 而且提高了模型精度。
GM(1,1)模型;背景值;卡尔曼滤波;沉降预测
通过已有沉降监测数据的处理和分析研究,构建科学的预测模型,对建筑物的安全监测与灾害预报工作具有极其重要的实际意义。近年来,国内外学者围绕灰色理论在沉降监测预测方面的应用进行了大量研究。文献[1]从传统灰色GM(1,1)建模原理入手,从模型的初值选取[2]、背景值的构造[2-3]以及残差的处理方面[4]进行综合系统的优化,并将优化模型运用到大坝的变形监测实验中,综合优化的模型可获得较高精度的大坝沉降预测结果。文献[5]针对沉降观测中时间序列间隔不同,提出了非等距灰色GM(1,1)模型,并将其加权处理模型应用到建筑物的沉降观测工作中,获得了比传统模型更高精度的预测结果。文献[6-8]应用灰色GM(1,1)的组合模型高层建筑物以及大坝的沉降工作,耦合的灰色 GM(1,1)预测模型提高了预测精度,能够满足沉降监测的需求。但对于沉降监测工作中,实测数据存在观测噪声,具有波动性大的问题,传统灰色及其优化模型都不能很好解决。本文利用卡尔曼滤波具有较好的抗噪声能力,运用卡尔曼滤波对原始沉降数据进行滤波降噪处理,并针对传统灰色GM(1,1)模型的固有系统误差,从构造模型的原理出发,建立了基于卡尔曼滤波的优化GM(1,1)模型。最后结合某建筑物沉降数据进行预测,并与传统灰色GM(1,1)和背景值优化的灰色GM(1,1)模型进行预测对比分析。
1 背景值优化的灰色GM(1,1)模型
1.1传统灰色GM(1,1)模型
传统的灰色GM(1,1)模型的建模过程如下:
假设一组原始数据序列,记为X(0)。
(1)
对数据X(0)序列进行一次AGO(原始数据进行累加),生成的新数据序列记为X(1)。
(2)

令Z(1)为X(1)数据序列的均值序列(MEAN),则

(3)
则灰色GM(1,1)模型的灰色微分方程为
(4)
式中:a为发展系数,b为灰作用量。
式(4)的白化型式可进一步表述为
(5)
(6)
式中:

则传统的灰色GM(1,1)模型的预测方程为

(7)
最后,恢复时间序列(模型值进行累减),得到灰色GM(1,1)模型的预测值为
(8)
1.2传统灰色GM(1,1)模型系统误差分析

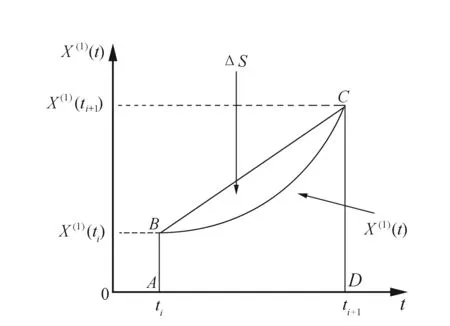
图1 背景值Z (1)序列的构造示意图
1.3构造新的背景值
(9)
经过式(9)重新构造的背景值,重复式(3)到式(8)的建模过程,即构建了背景值优化的灰色GM(1,1)预测模型。
2 卡尔曼滤波
卡尔曼滤波是一种通过对被提取信号有关的观测量的算法估计得出所需信号的滤波方法[9]。离散系统卡尔曼滤波的数学模型由状态方程和观测方程构成,可表示为[10-11]
(10)
式中:Xk为n×1阶状态向量,Lk为m×1阶观测向量,Fk/k-1为n×n阶状态转移矩阵,Gk-1为n×r阶动态噪声矩阵,Wk-1为r×1阶动态噪声,Vk为m×1阶观测噪声,Hk为m×n阶观测矩阵。
利用最小二乘原理,随机离散型卡尔曼滤波递推公式为[9-12]
(11)
离散型卡尔曼滤波模型的一步预测值的方差矩阵为
(12)
卡尔曼滤波模型的状态向量的估计值为
(13)
卡尔曼滤波模型的状态向量估计值的方差矩阵为
(14)
式中,Jk为卡尔曼滤波增益矩阵
(15)

3 工程应用
该工程为郑州市某项目新建居民楼,在1~9#栋居民楼布设28个沉降观测点,按照二等水准测量的要求进行往返测量,监测周期为一周,以确定每栋楼沉降的稳定性。选取位于8#楼的监测点8-12的观测数据,将原始的观测数据进行卡尔曼滤波处理,获取去噪的更加平滑的建模数据,然后就滤波后的数据进行背景值优化灰色GM(1,1)模型的拟合以及预测,借此反映该栋楼的沉降情况。原始的观测数据如表1所示。
3.1卡尔曼滤波降噪

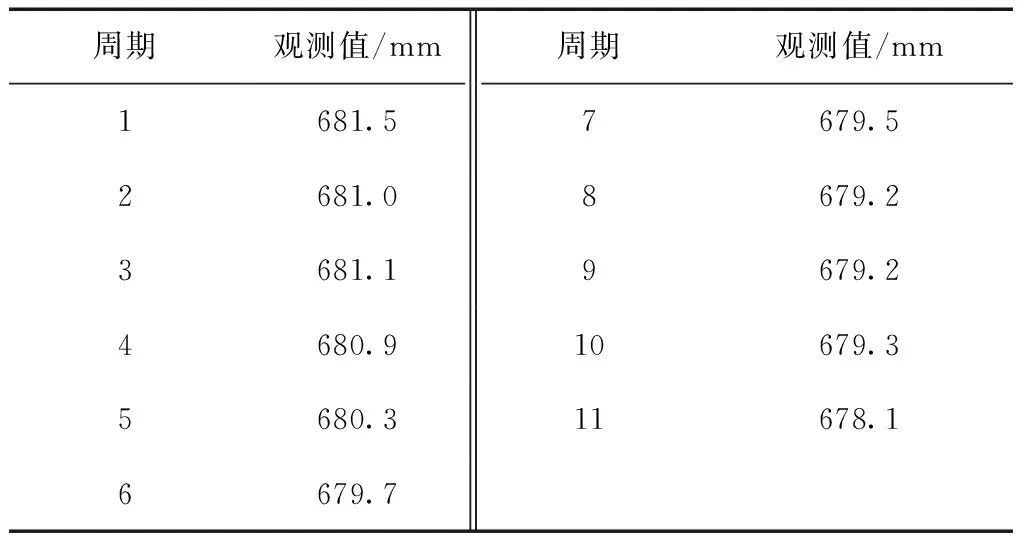
表1 监测点原始数据序列
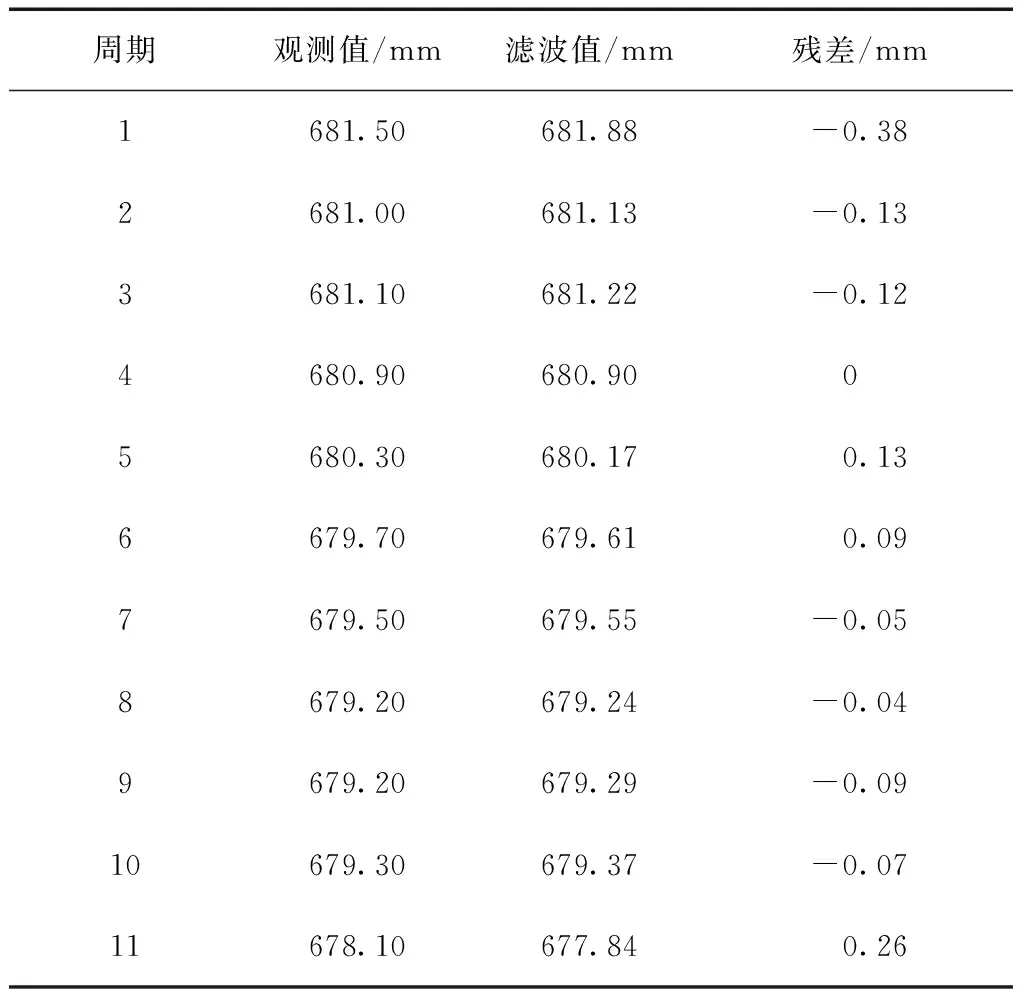
表2 滤波值与原始值的对比
3.23种预测模型的数据结果分析
按照1.1章节的传统灰色GM(1,1)模型的建模过程,利用表1中原始数据的前7期数据建立传统的灰色GM(1,1)模型,进行后4期数据的预测,该模型为模型1;按照1.3章节重新构造背景值的优化方法,利用表1中原始数据的前7期数据建立背景值优化的灰色GM(1,1)模型,进行第8~11期数据的预测,该模型为模型2;利用表2中卡尔曼滤波数据的前7期数据建立基于卡尔曼滤波的背景值优化的灰色GM(1,1)模型,进行后4期数据的预测,该模型为模型3。3种预测模型的拟合值和预测结果如表3所示。另外,3种模型的数据与实测数据曲线比较如图2所示。
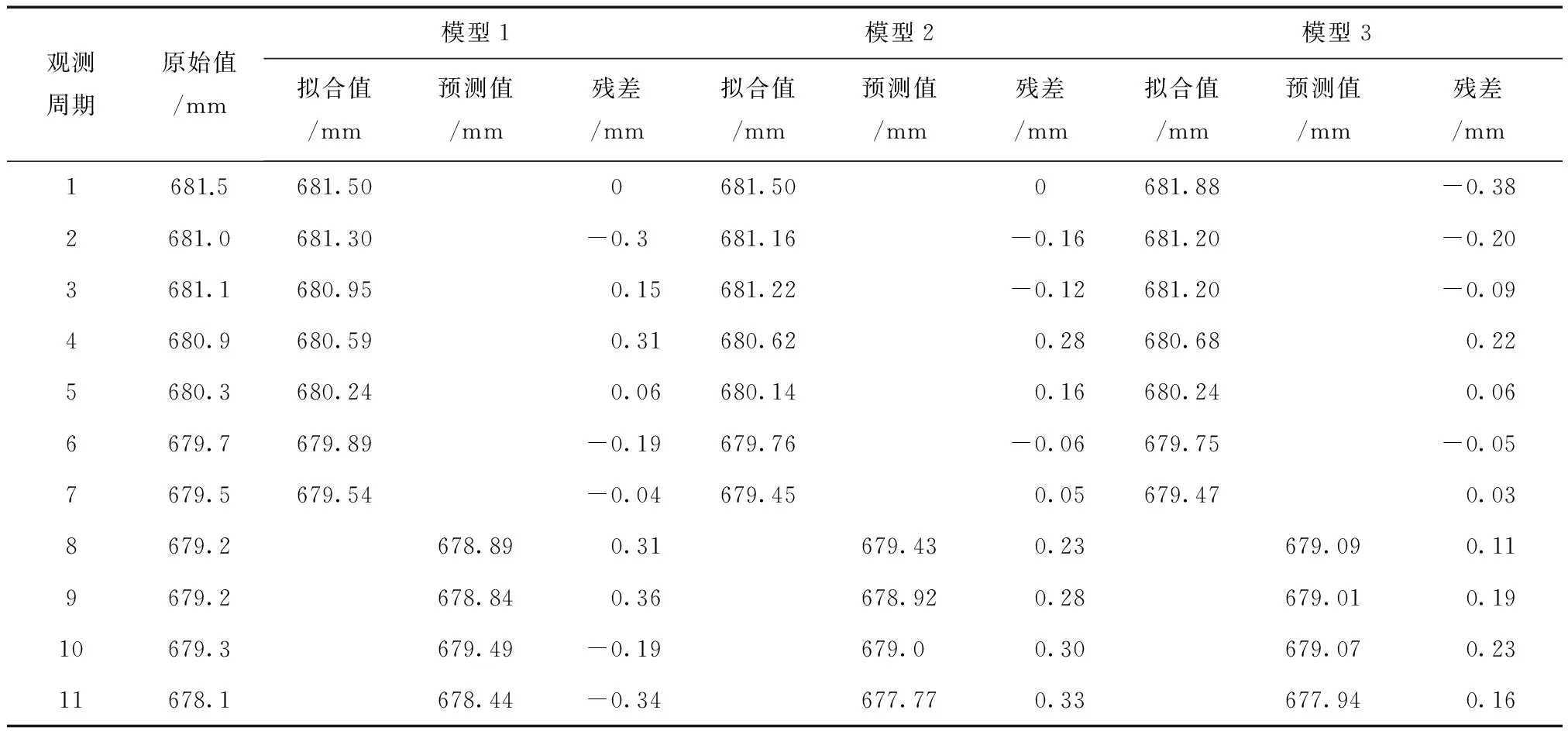
表3 3种模型拟合值和预测值
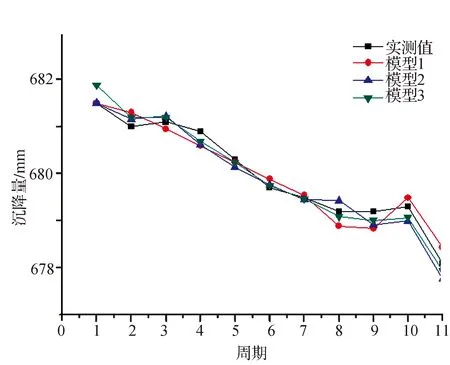
图2 3种模型的预测值与实测值比较
从表3中可以看出,经过卡尔曼滤波降噪处理的数据建立背景值优化的灰色GM(1,1)模型的残差中误差为0.19 mm;利用原始数据构建的背景值优化的灰色GM(1,1)模型的残差中误差为0.21 mm;传统灰色GM(1,1)的残差中误差为0.25 mm。同时,从图2中可以看出,基于卡尔曼滤波的优化GM(1,1)模型的数据拟合曲线最接近实际的观测值。实验验证得出,卡尔曼滤波降噪的有效性,通过重构背景值的灰色GM(1,1)模型的精度优于传统灰色GM(1,1)模型,卡尔曼滤波降低了建模数据的干扰噪声,使预测数据更有实际的参考价值。
4 结束语
建筑物的沉降监测工作中,利用实测的观测数据建立科学的预测模型。在满足工程应用的精度要求下,预测模型需要的观测资料较少,减轻了大量的外业实测工作,提高了工作效率,同时提供了可靠的参考资料,对建筑物的安全监测与预报工作具有极其重要的意义。本文针对传统灰色GM(1,1)模型的固有系统误差,从构造模型的原理出发,重新构造了模型的背景值对传统模型进行优化,利用卡尔曼滤波具有较好的抗噪声能力,运用卡尔曼滤波对原始沉降数据进行滤波降噪处理,建立基于卡尔曼滤波的优化GM(1,1)模型,使得建模数据的抗干扰能力增强,改善优化的灰色GM(1,1)模型的稳定性。并结合某建筑物沉降数据进行预测和对比分析。通过实例对比分析表明,基于卡尔曼滤波的优化GM(1,1)模型不仅可以有效剔除监测数据中的随机噪声, 而且提高了模型精度,具有一定的参考价值。
[1]李克昭,李志伟,孟福军,等.基于综合优化GM(1,1)的形变预测模型[J].大地测量与地球动力学,2016,36(2):120-123.
[2]张彬,西桂权.基于背景值和边值修正的GM(1,1)模型优化[J].系统工程理论与实践,2013,33(3):682-688.
[3]刘乐,王洪国,王宝伟.基于背景值构造方法的GM(1,1)模型优化[J].统计与决策,2009(1):153-155.
[4]郭兰兰,邹志红,安岩.基于残差修正的GM(1,1)模型在水质预测中的应用[J].数学的实践与认识,2014,44(19):176-181.
[5]成枢,李强.基于非等间隔GM(1,1)模型的沉降预测[J].测绘与空间地理信息,2015,38(4):33-35.
[6]高宁,崔希民,高彩云.高层建筑物沉降变形的灰线性预测[J].测绘科学,2012,37(3):96-98.
[7]张俊中,雷伟伟,王睿,等.灰线性回归模型在建筑物沉降分析中的应用[J].河南科学,2015,33(3):416-420.
[8]沈哲辉,黄腾,唐佑辉.灰色—马尔科夫模型在大坝内部沉降预测中的应用[J].测绘工程,2015,24(2):69-74.
[9]姜刚,杨志强,张贵钢.卡尔曼滤波算法的灰色理论模型在变形监测中的应用[J].测绘科学,2011,36(4):19-21.
[10] 符新新,高俊强,石岩. Kalman滤波在GPS非差相位精密单点定位中的应用[J].黑龙江工程学院学报,2015,29(3):6-8.
[11] 文鸿雁,周吕,韩亚坤,等. 基于卡尔曼滤波的GM(1,1)模型在高铁隧道沉降变形分析中的应用[J]. 大地测量与地球动力学,2014,34(1):88-91.
[12] 周吕,文鸿雁,韩亚坤. 灰关联Kalman滤波的大坝变形分析模型[J]. 桂林理工大学学报,2013,33(1):95-98.
[责任编辑:刘文霞]
Application of an optimized GM(1,1) model based on Kalman filter to the subsiding prediction of buildings
JIANG Tao1,2
(1.Key Laboratory of Mine Spatial Information Technologies, National Administration of Surveying, Mapping and Geoinformation, Jiaozuo 454000, China;2.School of Surveying and Landing Information Engineering, Henan Polytechnic University, Jiaozuo 454000, China)
To improve the disturbance ability and prediction precision of the Grey GM(1,1) model, using the KALMAN filter to denoise the original settlement data and reconstruct the background value of the grey GM(1,1) model, this paper obtains an optimized M(1,1) prediction model based on KALMAN filter. A case study upon a building subsidence measure data is conducted. The calculation results based on new model,traditional GM(1,1) model and the optimized GM(1,1) model are compared. The results show that new model can not only reduce random noise in monitoring data effectively, but also improve the precision of the model.
GM (1, 1) model; background value; Kalman filter;subsidence prediction
10.19352/j.cnki.issn1671-4679.2016.04.002
2016-04-11
国家自然科学基金资助项目(41001226)
蒋涛(1989-),男,硕士研究生,研究方向:3S集成与应用.
P208
A
1671-4679(2016)04-0007-04