非对称伸缩翼飞行器动力学建模及特性分析
2016-08-15郭建国陈惠娟蒋瑞民王国庆
郭建国, 陈惠娟, 周 军, 蒋瑞民, 王国庆
(1. 西北工业大学精确制导与控制研究所, 陕西 西安 710072)2. 北京运载火箭技术研究院研发中心, 北京 100076)
非对称伸缩翼飞行器动力学建模及特性分析
郭建国1, 陈惠娟1, 周军1, 蒋瑞民1, 王国庆2
(1. 西北工业大学精确制导与控制研究所, 陕西 西安 710072)2. 北京运载火箭技术研究院研发中心, 北京 100076)
以非对称伸缩翼飞行器为对象,构建了非对称变翼下的飞行器动力学模型,分析了非对称变翼对动力学的影响特性。首先,运用牛顿-欧拉法建立了飞行器多刚体动力学模型,突出了非对称伸缩变形所产生的模型差异;其次,以流体力学计算软件计算获得的气动数据为依据,探讨了非对称伸缩变形对飞行器质心偏移、转动惯量、气动特性、滚转力矩和纵向静稳定性的动力学特性的影响规律。最后,将翼展非对称动态变化作为系统输入,以非对称伸缩翼所占的质量比和伸缩速率为特征量,分析了翼展非对称变化下的飞行器动态特性。结果表明,翼展非对称伸缩动态变化,使飞行器具有快速滚转的能力,可作为一种主动控制方式。
变体飞行器; 非对称; 伸缩变形; 动力学建模; 动态特性
0 引 言
飞行器将自身结构的某一部分进行变形,来提高和优化飞行器的总体飞行性能,已成为近年来国内外的一个重要研究热点[1-2]。和传统飞行器相比,变体飞行器在气动、控制、结构和材料等多个学科提出了富有创新意义的挑战[3-6]。
目前对变翼的变体飞行器的研究,主要集中于对称变翼的飞行器上,如采用对称变化的伸缩翼[7]、变后掠翼[8-9]和折叠翼[10-11]等形式[12-13]。在变体飞行器数学建模问题上,一种方法是将飞行器作为一个整体,用经典的牛顿力学方法来建立和常规飞行器相同的动力学模型,通过气动特性来反映其特性[7,14-16]。第二种方法将飞行器看作由多个不同刚体组成,利用动量和动量矩定理来建立变体飞行器的动力学模型[11,17]。或运用Kane法、拉格朗日方程等分析力学方法建立广义坐标下的多刚体动力学模型[8,18]。以上这些方法不仅应用于对称变形飞行器,而且也应用于非对称飞行器中。
在变体飞行器动力学特性问题上,常常结合不同变形模式,主要从变体过程产生的附加特性、弹性、动态特性和飞行应用模式等方面开展相关的研究[19-21]。
一般的对称变形飞行器,通过机翼的对称变形,主要来改变作用于飞行器气动力的大小。非对称伸缩翼变形是非对称变形的一种特殊模式,它通过机翼非对称变形,不仅可以改变作用于飞行器气动力的大小,还可以改变力的方向,产生影响滚转通道的控制力矩。因此对于非对称伸缩变形飞行器动力学模型和特性的研究,具有重要的意义。
本文以这种特殊的非对称伸缩翼飞行器为研究对象,利用牛顿-欧拉法来建立飞行器动力学模型,其形式在与常规飞行器动力学模型保持一致的情况下,突出了非对称情况下的差异。基于这种飞行器的气动数据,分析总结了非对称变翼下的动力学特性。并在非对称伸缩变化下所展现的多方面动力学特性的基础上,将这种非对称伸缩动态变化作为一种主动控制方式,分析非对称伸缩下的动态特性。
1 动力学建模
针对如图1所示的非对称伸缩翼飞行器,这里考虑左翼保持不变,右翼进行伸缩。由于机翼伸缩瞬时质心CG偏离原对称机体质心O。因此,右翼的伸缩使得飞行器质心位置和转动惯量不再固定不变,均为随时间变化的函数。为了反映出非对称变形所产生的特性,不能再将飞行器作为一个单独的刚体单元。
图1 非对称伸缩翼飞行器示意图
本文将非对称伸缩飞行器视为由两个刚体组成的质点系,运用广义的牛顿欧拉法建立其动力学方程。这里选取惯性系AXYZ,同时,为了研究对比非对称伸缩翼飞行器不同于一般对称飞行器的动力学特性,本文以O点作为参考点,选取和常规飞行器相同的机体坐标系Ox1y1z1[8]。
将飞行器视为除右侧伸缩翼以外的机体部分和右侧伸缩翼两个刚体。设飞行器的总质量为m,右侧伸缩翼部分质量为m1,除右侧伸缩翼以外的机体部分质量为m2,l为翼缩短的长度。
1.1由动量定理建立的动力学方程
基于图1所示非对称伸缩翼飞行器,由质点系动量定理:
(1)
式中,∑F为飞行器所受的合外力;r1,r2分别为右翼质心和剩余部分质心在惯性系AXYZ下的矢径,即为ri=ro+ρi(i=1,2)。其中r0为O点在惯性系AXYZ下矢径;ρ1,ρ2为分别为O点到右翼质心和剩余部分质心的矢径。展开得到点O运动的动力学方程:
(2)
式中,vo为机体坐标系在惯性系AXYZ下的速度;w为角速度;F1和F2分别为右翼和剩余部分所受外力。将飞行器作为一个整体来考虑,则F1和F2合成后包括总重力G、推力P和总气动力Fe:
F1+F2=G+P+Fe
ΔF为伸缩过程中由于飞行器总质心偏移所产生的附加力,其表达式为

(3)
式中,Δr为飞行器整体的质心偏移矢量。由式(3)知,飞行器在机翼对称情况下时Δr=0,则ΔF=0,这与常规飞行器所得到的动力学模型一致。
1.2由动量矩定理建立的动力学方程
将飞行器作为伸缩右翼和剩余的机体组成的刚体质点系,可得绕参考点O的动量矩Ho为
(4)
飞行器受到的合外力矩为
得质点系动量矩定理
(5)
从而可以得到非对称伸缩翼飞行器绕点O旋转的动力学方程:
(6)
式中,M1和M2分别为右翼和剩余部分所受外力对点O的力矩,M1和M2合成后包括总质心偏移产生的重力力矩MG和总气动力矩Me:
M1+M2=MG+Me
ΔM为右侧翼伸缩过程中由于质心偏移、质量分布变化所产生的附加力矩,表达式为

(7)
式中,I为机体的惯性阵。
式(2)和式(6)即完整的动力学模型。飞行器在机翼对称情况下,则ΔM=0,这与常规飞行器所得到的动力学模型一致。伸缩过程中的飞行器机翼的不对称会引起各个方向上附加的气动力ΔF和力矩ΔM。可以看出,ΔF和ΔM是由质心偏移和转动惯量等因素变化所产生的。
2 非对称飞行器动力学特性分析
翼的伸缩使气动外形改变从而使飞行器受到的气动力和力矩变化。本文采用Fluent软件模拟飞行物理环境计算得到的气动数据。这里考虑飞行器飞行马赫数为0.72,飞行高度为100m,翼展全长1m。
这里分别针对右侧翼在不同缩短变化过程中来分析飞行器的质心偏移、转动惯量、气动特性、滚转力矩和纵向静稳定性的变化规律。
2.1质心偏移
一般的对称变形只会使质心纵向偏移,但对于非对称变化,会使质心在横向产生较大偏移,右侧翼在不同缩短比例下的质心偏移量如图2所示,从图中可以看出机翼的缩短使得质心主要在Z轴产生相对较大的偏移量,而在X轴和Y轴方向的偏移量很小。

图2 质心偏移量
2.2转动惯量相对比
机翼非对称变化下,不仅使得质心产生了一定的偏移量,而且也直接影响到转动惯量的变化。图3给出右侧翼在不同缩短比例下对飞行器是3个主轴转动惯量影响的程度。
图3 转动惯量比
图中,Ixx0,Iyy0,Izz0为原对称机体3个主轴的转动惯量,ΔIxx,ΔIyy,ΔIzz,ΔIxy,ΔIxy,ΔIyz分别为右侧翼变化所引起的转动惯量分量的变化量。
可以看出,随着右侧翼缩短比例的增加,一方面对于滚转通道的转动惯量影响随之增大,另一方面也增大了耦合惯性积Ixz,但整体上对其他转动惯量的影响相对较小。
2.3气动特性
右侧翼的不对称变化直接影响到飞行器整体的气动特性。图4~图6分别给出了飞行器的升力、阻力和升阻比在右侧翼不同缩短比例下的变化情况。
图4 升力系数变化曲线
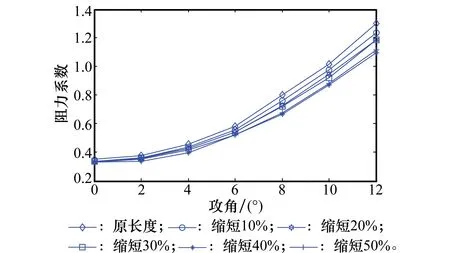
图5 阻力系数变化曲线
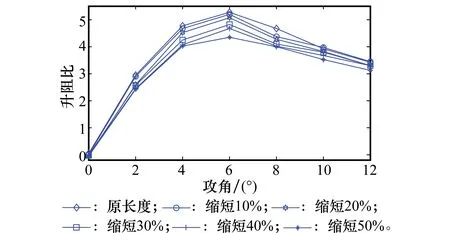
图6 升阻比变化曲线
由图4~图6中可以看出:
(1) 同一攻角下,右翼缩短程度增大,升力系数、阻力系数和升阻比均在不同程度下减少;
(2) 攻角为6°时,得到最大的升阻比。此时,当右翼缩短50%时,升力系数减小约26.7%,阻力系数降低约11%,升阻比下降约18%。
2.4滚动力矩
由于非对称翼的变化直接影响到飞行器质心的横向偏移和不对称气动力,所以对飞行器的滚动力矩影响较大,图7给出了右侧翼在不同缩短比不同攻角下滚转力矩系数的变化情况。从图7中可以看出:
(1) 同一攻角下,右翼缩短程度增大,滚转力矩系数随之增大;
(2) 当攻角不为零时,由于左右机翼的不对称产生了滚转力矩。滚转力矩系数随着攻角的增大而增大,在攻角较小时具有很好的线性度。
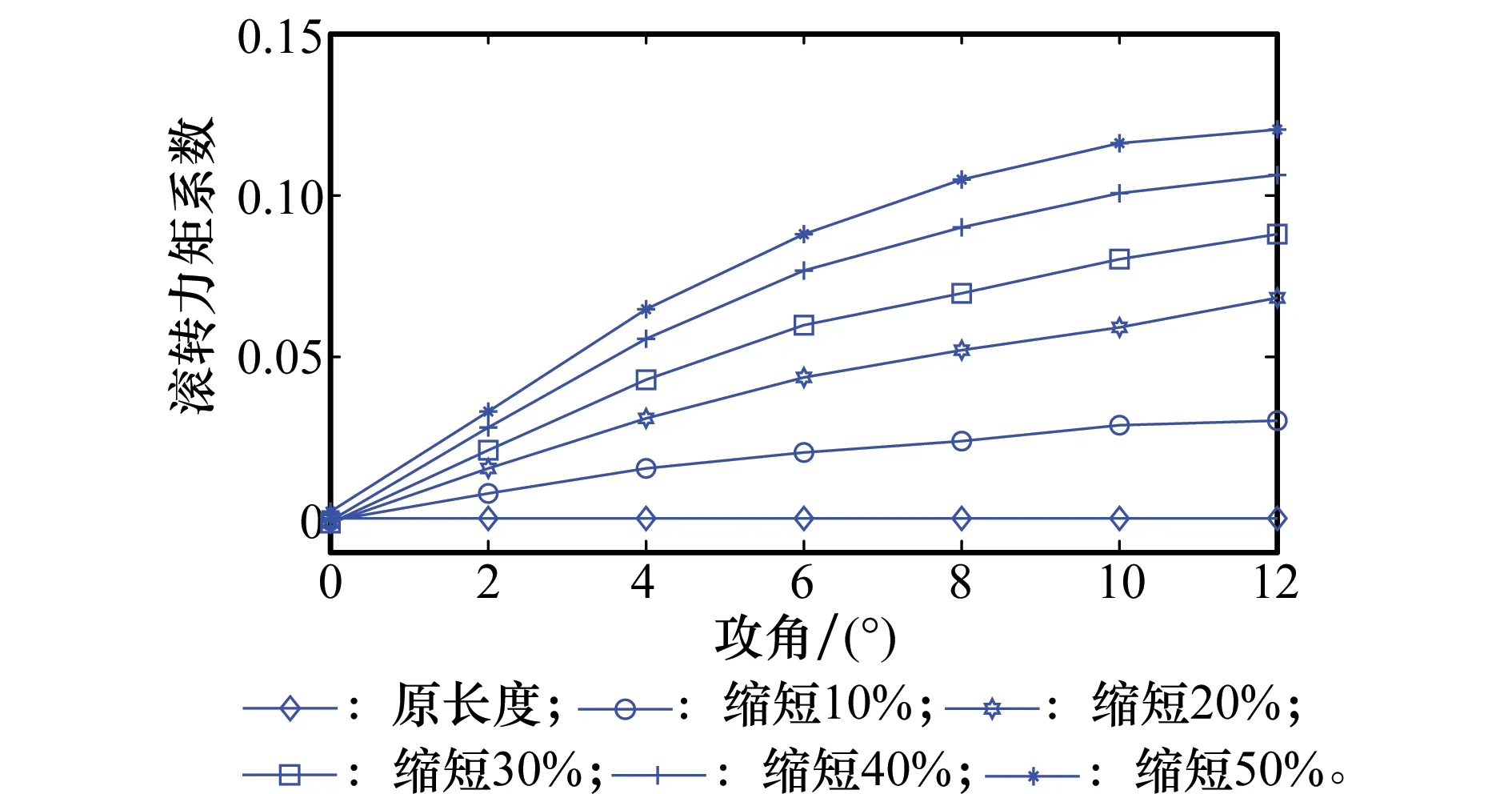
图7 滚转力矩系数变化曲线
2.5纵向静稳定性
飞行器右翼非对称变化对纵向静稳定性有一定的影响。如图8所示,图中给出了飞行器纵向静稳定度在右侧翼在不同缩短比例下的变化情况。从图8中可以看到右翼由原长变到原长的50%的过程中,机体的纵向静稳定度稍有变小的趋势,因此,右侧翼缩短对飞行器纵向静稳定性的影响较小。

图8 纵向静稳定度
2.6阻尼导数
飞行器右翼非对称变化对阻尼导数有一定的影响。如图9所示,俯仰和偏航通道的滚转阻尼导数几乎不随右侧翼的伸缩而变化,但滚转阻尼导数随着右翼缩短程度增大而减小。右翼由原长变到原长的50%,滚转阻尼导数减小约45%。
此外,翼的形状和布局参数也直接影响到飞行器的动力学特性。翼的形状直接决定了飞行器所受的气动力,不同的翼型会产生不同的气动力大小,因此也影响到非对称变形下的动力学特性。特别针对本文所考虑的翼型,其形状变化对飞行器动力学影响主要反映在非对称变化时伸缩翼所占质量比变化对飞行器动力学特性的影响。
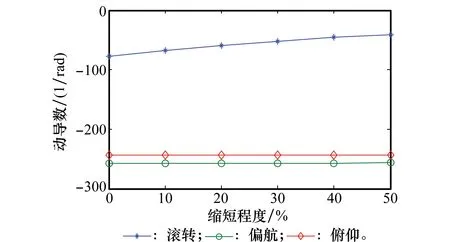
图9 阻尼力矩导数变化曲线
翼的布局参数主要反映在非对称变形飞行器数学模型的参数“ρ1”中,因此翼的布局参数影响到飞行器转动惯量和非对称变形下的附加力矩,决定了非对称变形的操控能力。
综合以上,一方面,机翼在非对称伸缩过程中,气动参数和转动惯量等参数都在不断的变化,使得非对称伸缩翼飞行器动力学模型成为一个快时变耦合非线性系统。另一方面,对于右侧翼的缩短,使得质心产生横向偏移,伴随产生随缩短比例增大而增大的滚转力矩,因此使得这种非对称飞行器具有快速滚动的能力。
为了深入研究这种非对称飞行器的动态特性,这里将飞行器右侧翼伸缩作为一个控制输入,在不考虑气动舵控制的条件下,分析非对称伸缩翼变化下飞行器动态特性。
3 右翼伸缩下的动态特性分析
为了进一步研究机翼在非对称变化情况下产生特殊的动力学特性,在不考虑气动舵的作用,只考虑右翼伸缩作用下所产生的动态特性。
基于所建立的非对称伸缩翼的动力学模型,这里为了能够便于说明问题,化简非线性模型,得到表征滚转角速度的数学模型:
(8)

从式(8)中可得到影响非对称变体的因素是非对称伸缩翼所占质量比和伸缩速率。以下针对这两个因素分析飞行器的动态特性。
3.1伸缩翼质量比的影响
为了能够反映伸缩翼质量比的影响特性,初始攻角为3.4°,侧滑角和滚转角均为0°。
设置右侧翼以0.5 m/s的速率先缩短10%,然后再以相同速率恢复原长,这种伸缩变化如图10所示。同时考虑3种不同的伸缩翼质量比,它们所引起的滚动通道转动惯量变化率如图11所示,显然,伸缩翼质量比越大所产生的转动惯量变化率就越大。
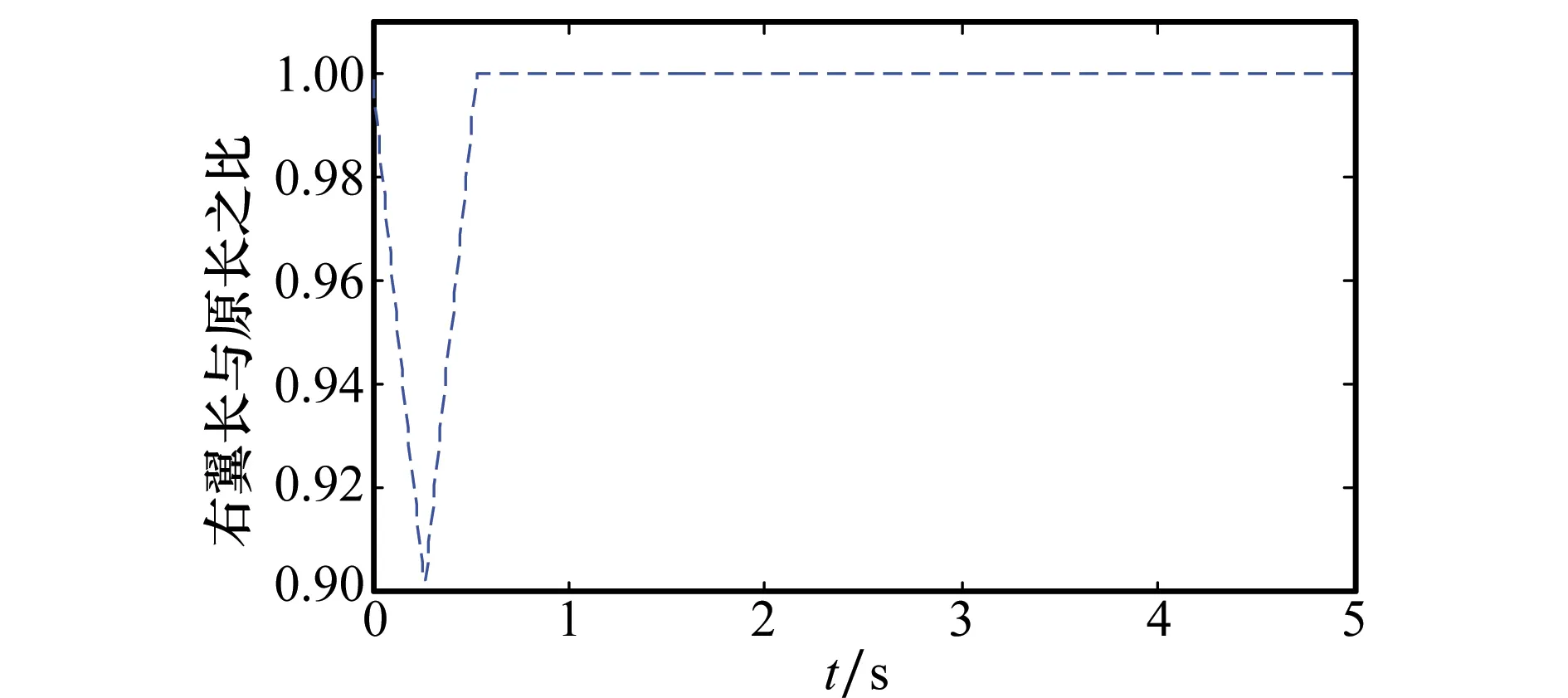
图10 机翼缩短度变化曲线
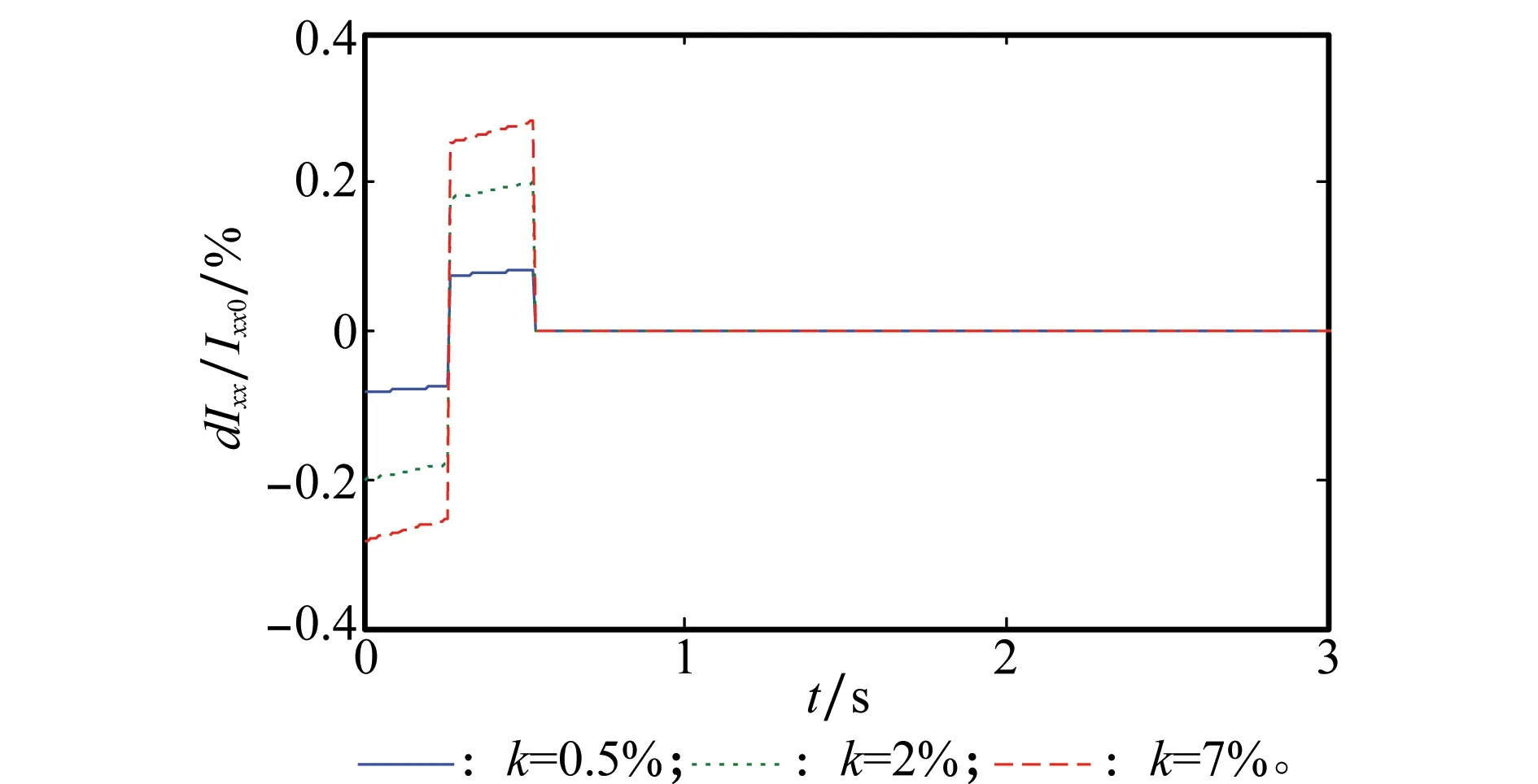
图11 转动惯量变化率
尽管伸缩翼质量比的增大会产生较大的转动惯量,并没提高滚动角的速率,但使得伸缩过程中滚动角变化随着伸缩翼质量比的增大而减小,变化曲线如图12 所示。
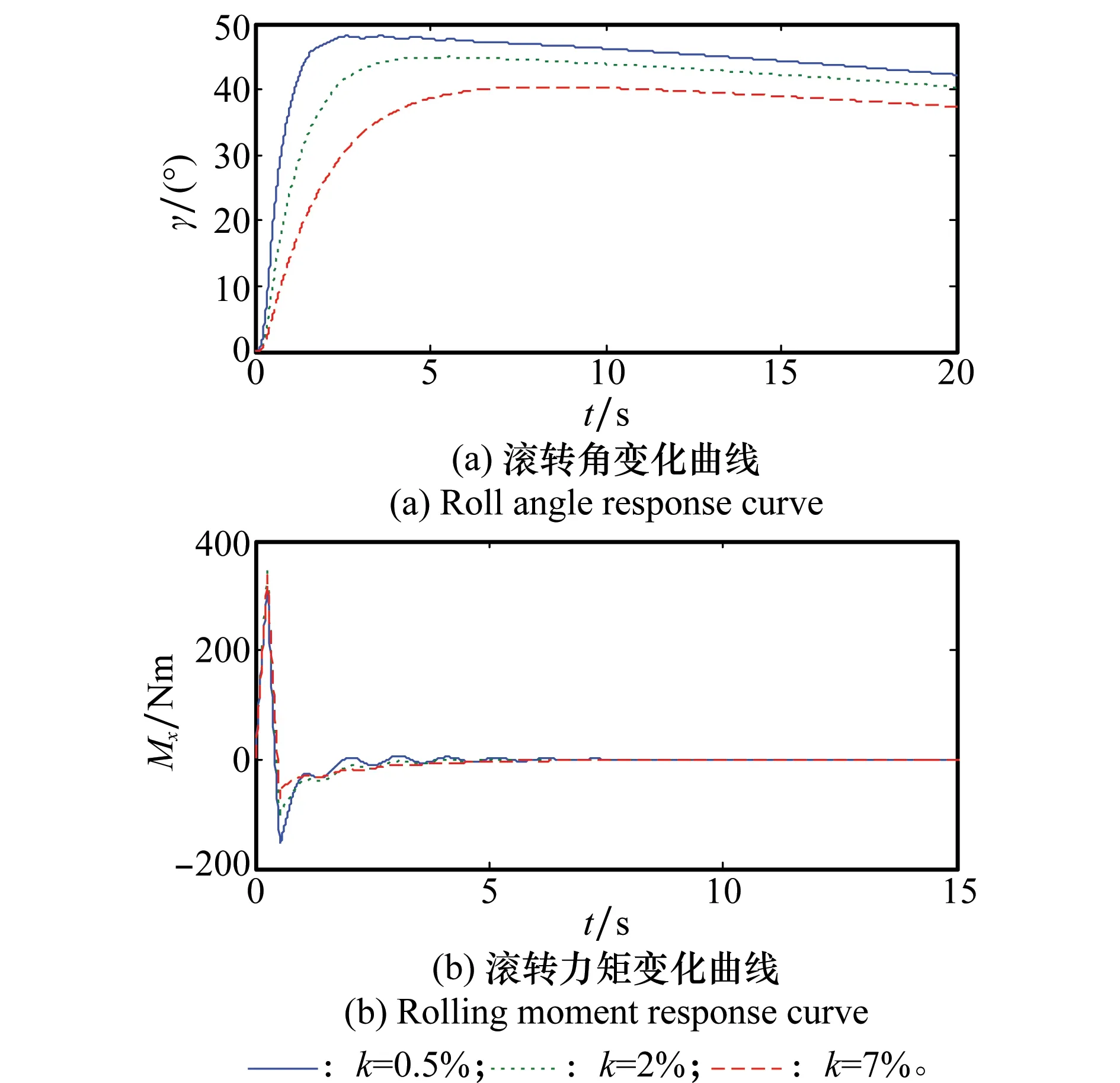
图12 滚转通道动态响应
以k=2%的情况为例,各滚转力矩分量变化曲线如图13所示,Mex,MIx,MGx,MBx分别指在滚动通道上左右翼受力不同引起的附加气动力矩、转动惯量变化引起的惯性力矩、质心偏移产生的重力矩以及偏航对滚转的气动耦合力矩。可以看出,翼伸缩过程中,附加气动力矩幅值大于其余,对非对称飞行器的动力学特性的影响也是最大的。从图12(a)中也可以看出,飞行器在右翼缩短后实现正向滚转,与气动力矩的方向相同,说明附加气动力矩对动力学特性变化起了主导作用。伸缩结束后,Mex,MIx,MGx都变为零,滚转通道主要受到偏航的耦合力矩和阻尼力矩的作用。
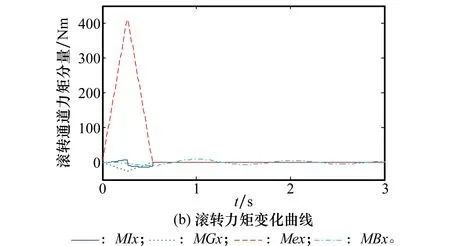
图13 k=2%情况下各滚转力矩分量变化曲线
对于俯仰偏航通道的影响随着伸缩翼质量比的增大而减小。图14给出了3种不同伸缩翼质量比下的附加攻角和侧滑角的变化状况。翼的伸缩引起攻角和侧滑角的抖动。其中俯仰通道主要受外力矩的影响,响应的开始,右翼缩短产生抬头力矩,攻角增大。而对于偏航通道,右翼的伸缩产生的气动力距变化较小,响应开始,偏航通道主要受附加惯性力矩作用使得侧滑角增大。
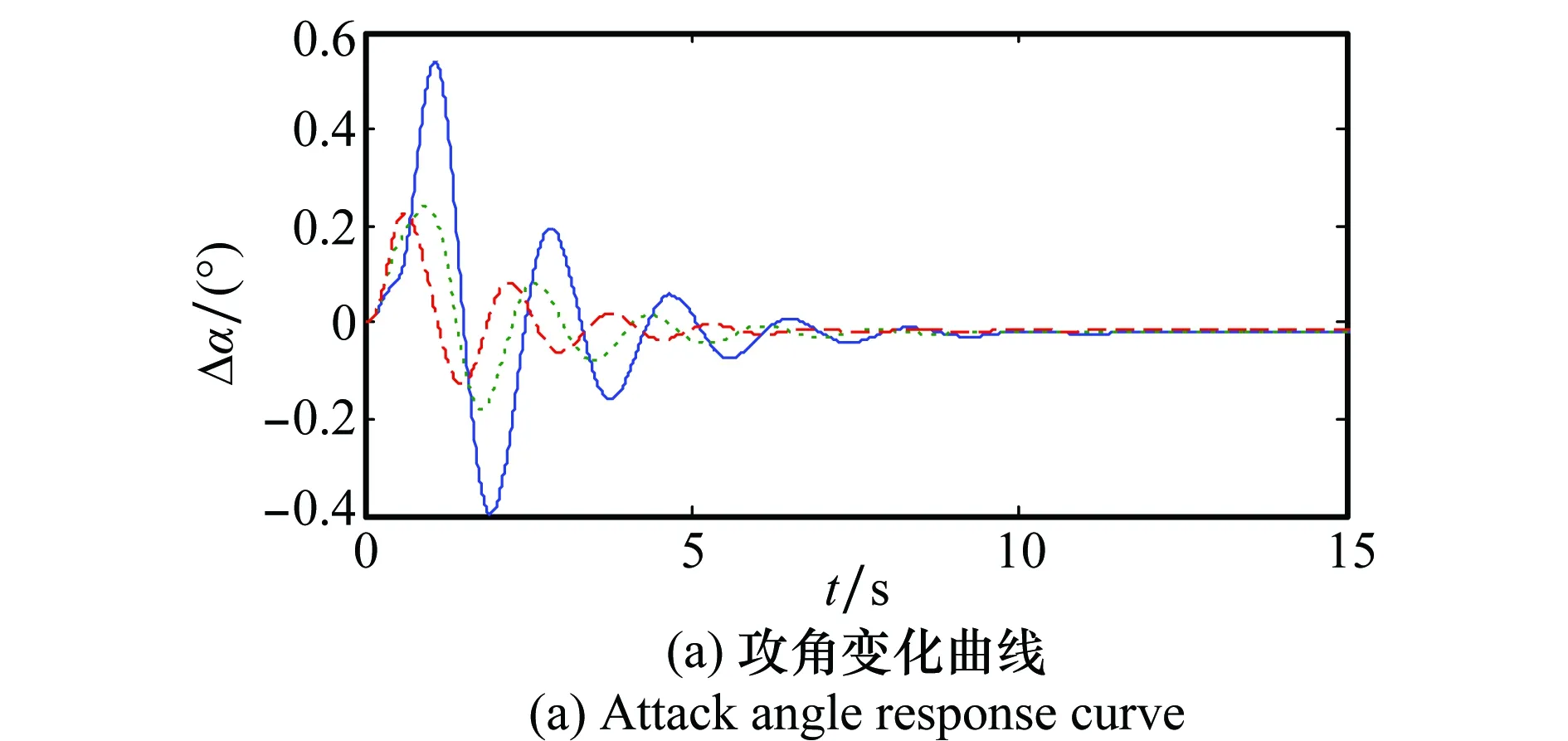
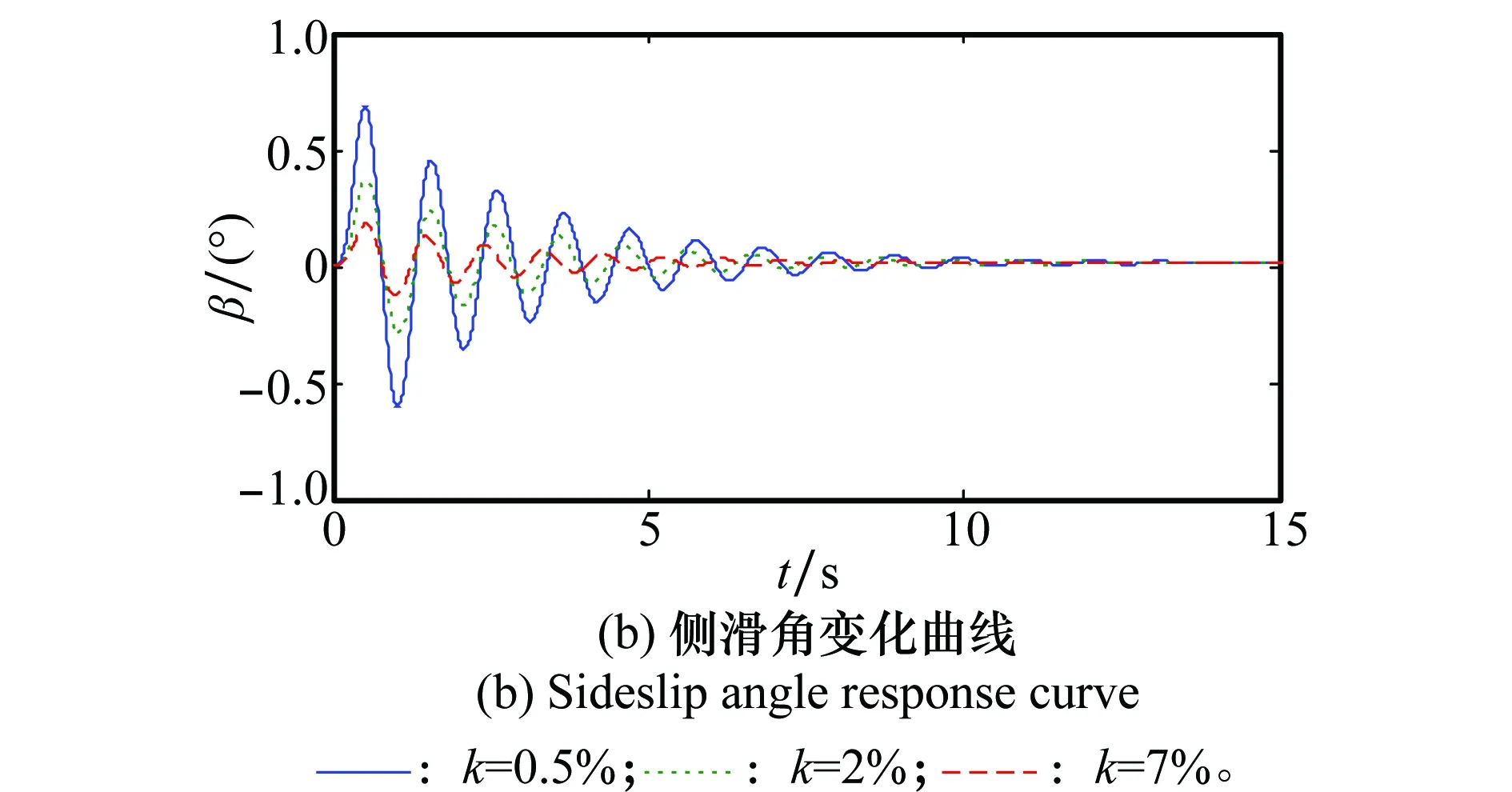
图14 攻角和侧滑角的动态响应
3.2伸缩速率的影响
翼伸缩过程中,各参数都是随着时间变化,伸缩速率直接决定相关参数变化的快慢。为研究它的影响,在同样的初始条件下,设置翼分别以2 m/s,0.5 m/s的速率缩短10%再伸回原长。图15给出了在不同伸缩速率下在滚动通道上所产生合力矩变化状况,显然伸缩速率越大,滚动通道上的合力矩变化越快。
图15 滚转通道的动态响应
伸缩速率的大小直接影响到整个飞行器的各通道的动态特性。图15和图16分别给出飞行器滚转角、攻角和侧滑角在不同伸缩速率条件下的变化状况。显然,随着伸缩速率的减少,对于飞行器三通道的动态特性影响随之增大。
出现以上特性的原因,是由于变翼伸缩速率过慢,使得伸缩变形过程增长,引起攻角和侧滑角大幅振荡,从而导致变翼伸缩速率对俯仰偏航通道的影响加剧。
综合以上非对称伸缩翼所占质量比和伸缩速率对飞行器3个通道的影响特性,可以通过设置相应的伸缩翼所占质量比和伸缩速率实现对飞行器滚动通道姿态的快速调整,因此,非对称伸缩翼可以作为一种主动控制方式,完成飞行器快速滚转。
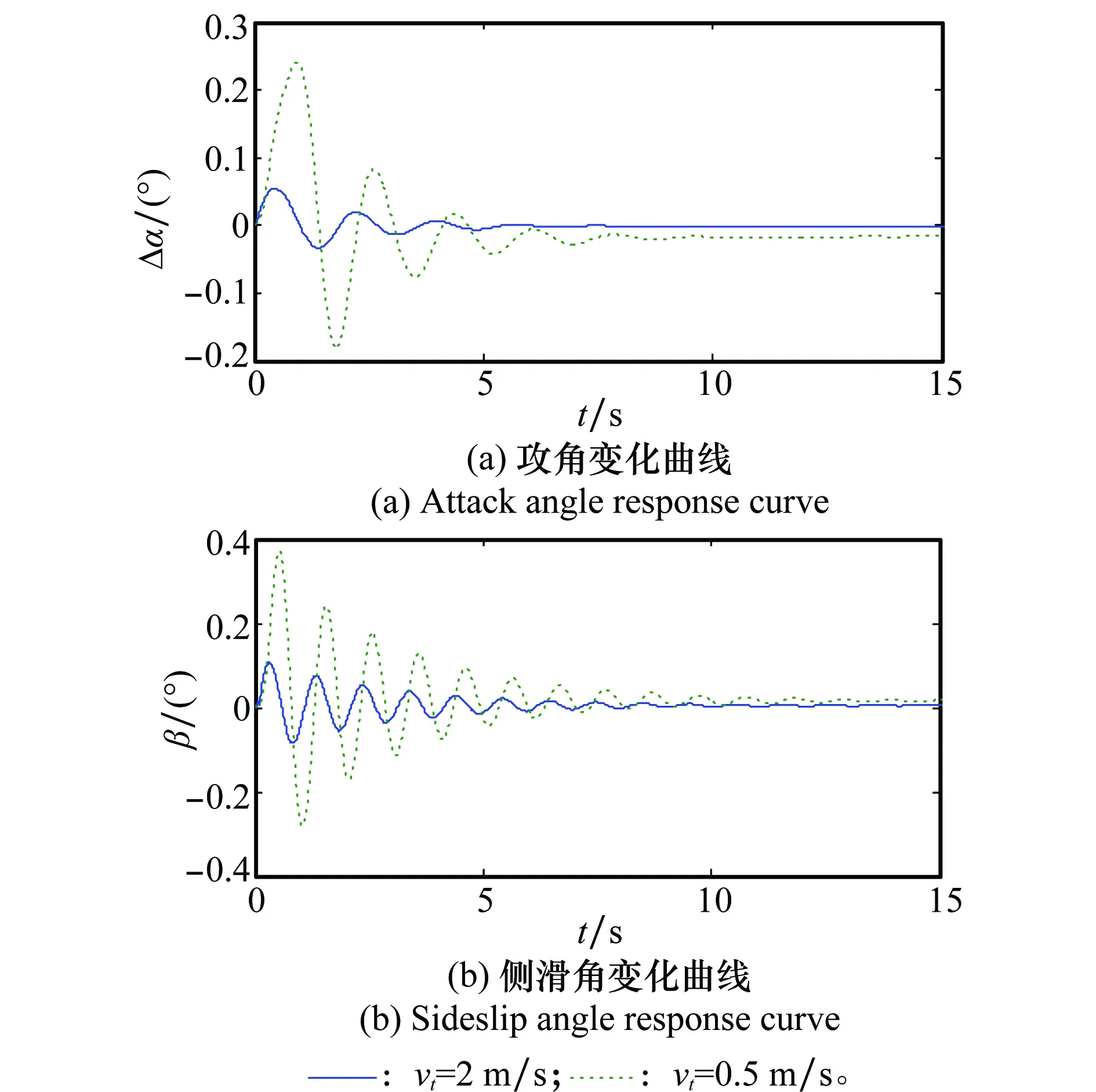
图16 攻角和侧滑角的动态响应
4 结 论
本文针对非对称伸缩翼变体模式,开展相关动力学与特性的研究,可以获得以下结论。
(1) 建立的非对称伸缩翼飞行器动力学模型是一个快时变强耦合非线性系统,反映出由于非对称伸缩翼所产生的质心偏移和转动惯量变化所引起的附加力和力矩的状况。
(2) 基于CFD软件获得的气动数据,得到了非对称伸缩翼对飞行器质心偏移、转动惯量、气动特性、滚转力矩和纵向静稳定性的影响规律。
(3) 基于非对称伸缩翼所占质量比和伸缩速率对飞行器动力学特性的影响特性,可以将非对称伸缩翼作为一种主动控制方式,实现飞行器的快速滚动。
[1] Lu Y P, He Z. A survey of morphing aircraft systems[J].ActaAeronauticaandAstronauticaSinica,2009,30(10):1960-1911. (陆宇平,何真.变体飞行器控制系统综述[J].航空学报, 2009,30(10):1960-1911.)
[2] Barbarino S, Bilgen O, Ajaj R M, et al. A review of morphing aircraft[J].JournalofIntelligentMaterialSystemsandStructures, 2011,22(9): 823-827.
[3] Takahashi T T, Spall R J, Tumer D C, et al. A multidisciplinary survey of advanced subsonic ractical cruise missile configuration[C]∥Proc.oftheAIAAAerospaceSciencesMeetingandExhibit, 2005:0709-0720.
[4] Jouannett C, Lundstrom D. Morphing wing design, from study to flight test[C]∥Proc.oftheAIAAAerospaceScienceMeetingIncludingtheNewHorizonsForumandAerospaceExposition, 2009:1619-1630.
[5] William A C. Morphing aircraft sizing using design optimization[J].JournalofAircraft, 2011,48(2): 612-622.
[6] Vasista S, Tong L Y, Wong K C. Realization of morphing wings: a multidisciplinary challenge[J].JournalofAircraft, 2012,49(1): 11-28.
[7] Yin M, Lu Y P, He Z, et al. Modeling and sliding mode control of morphing aircraft for morphing-aided maneuver[J].SystemsEngineeringandElectronics, 2015, 37(1): 128-134. (殷明,陆宇平,何真,等.变体飞行器变形辅助机动的建模与滑模控制[J].系统工程与电子技术,2015,37(1):128-134.)
[8] Zhang J, Wu S T. Dynamic modeling for a morphing aircraft and dynamic characteristic analysis[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2015,41(1):58-64.(张杰,吴森堂.一种变体飞行器的动力学建模与动态特性分析[J].北京航空航天大学学报, 2015,41(1):58-64.)
[9] Yang G T, Tang S J, Zhao L D, et al. Dynamic modeling and response of a morphing UAV with variable sweep and variable span[J].ActaArmamentarii, 2014,35(1):102-107. (杨贯通,唐胜景,赵林东,等.变后掠变展长飞行器动力学建模与动态响应分析[J].兵工学报,2014,35(1):102-107.)
[10] Xu L B, Yang S X, Chen J, et al. Dynamic analysis of M-wing morphing aircraft[J].Trans.onBeijingInstituteTechnology, 2013,33(2): 127-132. (许来斌,杨树兴,陈军,等.M型机翼变体飞机动力学分析[J].北京理工大学学报,2013,33(2):127-132.)
[11] Yue T, Wang L X, Ai J Q. Longitudeinal multibody dynamic characteristcs of Z-wing morphing aircraft[J].ActaAeronauticaandAstronauticaSinica,2010,31(4):679-686.乐挺,王立新,艾俊强.Z型翼变体飞行器的纵向多体动力学特性[J].航空学报,2010, 31(4): 679-686.)
[12] Neha G, Akhilesh J, Jeffrey M, et al. Intelligent control of a morphing aircraft[C]∥Proc.oftheAIAA/ASME/ASCE/AHS/ASCStructures,StructureDynamic,andMaterialsConference, 2007:1716-1732.
[13] Pecora R, Amoroso F, Lecce L. Effectiveness of wing twist morphing in roll control[J].JournalofAircraft, 2012,49(6): 1666-1674..
[14] Beaverstock C S, Fincham J H S, Friswell M I, et al. Effect of symmetric & asymmetric span morphing on flight dynamics[C]∥Proc.oftheAIAAAtmosphericFlightMechanicsConference, 2014:0545-0559.
[15] Seigher T M, Neal D A, Bae J S, et al. Model and flight control of large-scale morphing aircraft[J].JournalofAircraft, 2007, 44(4): 1077-1087.
[16] Niksch A, Valaseky J, Thomas W, et al. Six-degree of freedom dynamic model of a morphing aircraft[C]∥Proc.oftheAIAAAtmosphericFlightMechanicConference, 2009:5849-5867.
[17] Obradovic B, Subbarao K. Modeling of dynamic loading of morphing wing aircraft[C]∥Proc.oftheAIAAAtmosphericFlightMechanicsConference, 2010:8236-5258.
[18] Tong L. Multi-body dynamic modeling and flight control for asymmetric variable sweep aircrafts[D].Hefei: University of Science and Technology of China,2013. (童磊.不对称变后略翼飞行器多刚体建模与飞行控制[D].合肥:中国科学技术大学,2013.)
[19] Reich G, Bowman J, Sanders B, et.al. Development of an integrated aeroelastic multibody morphing simulation tool[C]∥Proc.ofthe47thAIAA/ASME/ASCE/AHS/ASC/Structure,StructureDynamics,andMaterialsConference,2006:1892-1901.
[20] Obradovic B, Sublbarao K. Modeling of flight dynamics of morphing-wing aircraft[J].JournalofAircraft, 2011,48(21): 391-402.
[21] Beaverstock C S, Ajaj R M, Friswell M I, et al. Effect of span-morphing on the longitudinal flight stability and control[C]∥Proc.oftheAIAAGuidanceNavigation,andControlConference, 2013:4993-5016.
Dynamics Modeling and characteristic analysis for vehicle with asymmetric span morphing wing
GUO Jian-guo1, CHEN Hui-juan1, ZHOU Jun1, JIANG Rui-min1, WANG Guo-qing2
(1. Institute of Precision Guidance and Control, Northwestern Polytechnical University, Xi’an 710072, China;2. R & D Center, China Academy of Launch Vehicle Technology, Beijing 100076, China)
Taking the asymmetric span morphing wing as the object, a dynamic model of vehicle with asymmetric span morphing wing is constructed, and the influence of the asymmetric morphing wing on the dynamics is analyzed. Firstly, the multi-rigid-body model of vehicle is established in order to highlight the differences arising from the asymmetric span morphing by utilizing the Newton Euler method. Secondly, on the basis of computational fluid dynamics (CFD) calculation of aerodynamic data, the properties of the dynamics of deformation are discussed including offset of center of gravity, moment of inertia, aerodynamic characteristics, rolling moment and the longitudinal static stability of the vehicle. Finally, with asymmetric dynamic change of wingspan as the system input, dynamic characteristics of the vehicle are analyzed by introducing the morphing velocity and mass ratio of the morphing wing to the body as two key parameters. The results show that asymmetric span dynamic change could make the vehicle rapidly roll, as a kind of active control.
morphing vehicle; asymmetric; span morphing; dynamics modeling; dynamic characteristic
2015-10-22;
2016-02-02;网络优先出版日期:2016-06-02。
国家自然科学基金(61473226)资助课题
TJ 761
A
10.3969/j.issn.1001-506X.2016.08.35
郭建国(1975-),男,教授,博士研究生导师,主要研究方向为飞行器制导、控制与仿真、先进控制理论与应用。
E-mail:guojianguo@nwpu.edu.cn
陈惠娟(1992-),女,硕士研究生,主要研究方向为飞行器制导、控制与仿真。
E-mail:1106430428@qq.com
周军(1966-),男,教授,博士研究生导师,主要研究方向为飞行器控制与仿真技术、先进控制理论及应用。
E-mail:zhoujun@nwpu.edu.cn蒋瑞民(1986-),男,讲师,主要研究方向为飞行器制导、控制与仿真。
E-mail:jrm2001@nwpu.edu.cn
王国庆(1985-),男,工程师,主要研究方向为飞行器制导、控制与仿真。
E-mail:wgq450544612@126.com
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160602.1528.008.html