基于自然驾驶数据的避撞预警对跟车行为影响
2016-08-13王雪松朱美新邢祎伦
王雪松, 朱美新, 邢祎伦
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
基于自然驾驶数据的避撞预警对跟车行为影响
王雪松, 朱美新, 邢祎伦
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
摘要:基于60 689 km车辆运行数据提取了1 613个跟车行为片段,并分析了前向避撞预警(FCW)系统对跟车行为2个重要参数——车头时距和反应时间的影响.结果表明,FCW系统对跟车车头时距影响不显著,但显著降低了跟车中的反应时间.白天状态下,反应时间减少了0.13 s;后车逼近前车时,反应时间减少了0.09 s.
关键词:前向避撞预警(FCM); 自然驾驶; 跟车行为; 车头时距; 反应时间
前向避撞预警(FCW)系统致力于减少追尾事故.这种车载系统利用传感器监测道路交通环境,当前方有潜在的碰撞危险时,在适当时机给予驾驶员报警,从而辅助驾驶员更有效地避免追尾事故.既有研究主要集中于探究FCW系统在临撞工况下对驾驶员避撞行为的影响,并发现FCW系统可以减少油门释放反应时间[1]及刹车反应时间[2].考虑到FCW系统直接影响着车辆间的纵向运动,因此其有可能也会对驾驶员在常态下的跟车行为产生影响,而跟车场景又是最常见的交通场景,因此本文致力于研究FCW系统对驾驶员跟车行为的影响.
跟车是指后车的速度与位置实时受到前方车辆影响的行驶状态,驾驶员跟车行为由2个重要参数表征:车头时距和反应时间[3].已经有较多研究探讨了FCW系统对车头时距的影响,发现FCW系统可以增大车头时距[4-5],并减少驾驶员处于短车头时距(如小于1 s)的时间比例[6].然而,还未有研究涉及FCW系统对驾驶员跟车反应时间的影响.此外,既有跟车反应时间的提取主要基于GPS数据[7]和定点摄像头拍摄的车辆轨迹数据[8],提取得到的反应时间精度有限.
自然驾驶研究(NDS)是指在自然状态下(即无干扰、无实验人员出现、日常驾驶状态下)利用高精度数据采集系统观测、记录驾驶员真实驾驶过程的研究[9].正在进行中的“上海自然驾驶研究”(SH-NDS)是中国首个自然驾驶研究项目.实验车均配置了包含FCW系统的Mobileye®车辆主动安全系统,每位实验参与者驾驶实验车2个月,Mobileye®系统在第1个月关闭,第2个月开启.本文基于上海自然驾驶数据提取跟车行为片段,并进一步对驾驶员在FCW系统关闭和开启2个阶段下的车头时距和反应时间进行提取,通过关闭与开启阶段的对比,量化FCW系统对跟车行为的影响.
1 研究综述
1.1车头时距
车头时距是指前车与后车先后经过同一观测点所经历的时间差[4],它表征了驾驶员可用于反应的时间量,是跟车行为安全性的度量指标.车头时距的平均值与交通流流率互为倒数,因此车头时距也是交通流流率的微观表征值.某种程度上,平均最小车头时距决定了路段的通行能力[10].
按照实验方法,可将探究FCW系统对车头时距影响的研究分为2类:场地测试和自然驾驶.通过场地测试,Dingus等[5]发现使用合适的方式可视化显示车头时距时,跟车车头时距增加了0.5 s;Ben-Yaacov等[4]发现使用FCW系统一段时间后,驾驶员保持了更长的跟车距离.场地测试是在试验道路上开展的,因此具有实验时间相对较短、缺乏真实交通场景等弊端.自然驾驶是在实际交通环境中采集驾驶行为数据,具有很高的真实性.
在汽车避撞系统(ACAS)项目中,Ervin等[6]利用自然驾驶数据发现,在高速公路上或在白天行驶时,使用FCW系统可以增大跟车车头时距.基于车载集成安全系统(IVBSS)项目中的自然驾驶数据,Bao等[11]和Sayer等[12]分别研究了FCW系统对货车和乘用车跟车车头时距的影响.实验结果表明,FCW系统使得货车驾驶员的车头时距增大,但使得乘用车驾驶员的车头时距减小.在欧洲现场运行测试(euroFOT)项目中,Kessler等[13]在真实交通条件下测试了多种车载系统,并发现使用自动巡航和FCW使得货车和乘用车驾驶员的跟车车头时距均有显著增加.
1.2跟车反应时间
对驾驶员跟车反应时间的研究开始于19世纪50年代,伴随着刺激-反应类跟车模型的建立[14].在此类跟车模型中,前车改变运行状态后(刺激),后车也要作相应的改变(反应),但前后车运行状态的改变不是同步的,而是存在延迟,这一延迟称为反应时间[7].反应时间是交通流稳定性的决定因素,在众多跟车模型中,反应时间都是一个不可或缺的参数[15].
然而,目前还没有文献研究FCW系统对驾驶员跟车反应时间的影响.因此,本研究旨在进一步证实FCW系统对跟车车头时距的影响,并探究FCW系统对跟车反应时间的影响.
2 数据采集
2.1上海自然驾驶研究
本研究的数据来自“上海自然驾驶研究”项目.该项目由同济大学、通用汽车公司、弗吉尼亚理工大学三方合作开展,旨在了解中国驾驶员的车辆使用、车辆操控以及安全意识.
项目使用5辆配备了SHARP2 NextGen数据采集系统的乘用车辆,采集真实交通环境下的驾驶数据.数据采集从2012年12月开始,持续至2015年12月,计划采集90名中国驾驶员的日常驾驶数据.每辆实验车均装有Mobileye®C2-270车辆主动安全系统,以评估该系统的有效性.每位实验参与者驾驶实验车2个月,Mobileye®系统在第1个月关闭,第2个月开启.
2.2数据采集系统
SHARP2 NextGen数据采集系统包含:车辆总线数据接口、三轴加速度计、可跟踪8个目标的雷达系统、温度及湿度传感器、GPS定位系统和四路摄像头[9].四路摄像头分别监测驾驶员的面部、车辆前方道路、车辆后方道路以及驾驶员的手部操作.数据采集系统的不同设备设置了不同的采样频率,分布在10~50 Hz.数据采集系统在车辆点火后自动启动、熄火后自动关闭.
2.3Mobileye®车辆主动安全系统
Mobileye®C2-270车辆主动安全系统由3个子系统构成:FCW系统、车道偏离预警系统、行人冲突预警系统.当碰撞时间(TTC)小于2.7 s时,FCW系统会发出一系列响亮尖锐的嘟嘟声,同时在屏幕上显示1个闪烁的红色车形图案(见图1a).
FCW系统同时提供车头时距提示和预警功能.当车头时距小于2.5 s时,车头时距数值将展示在屏幕上,并持续更新(见图1b).当车头时距下降到0.6 s时,屏幕会显示1个红色的车形图案(见图1c),同时警报声响起,以警示跟车过近.

图1FCW系统视觉显示
Fig.1Visual display of FCW system
2.4数据描述
截至2015年7月,上海自然驾驶研究项目已采集55名驾驶员、累计超过13万公里的驾驶数据.本文选择了其中19名驾驶员的数据用于分析,共包含4 573次出行,累计车公里为60 689 km,其中,32 797 km采集自Mobileye®系统关闭阶段,另外的27 892 km采集自Mobileye®系统开启阶段.驾驶员年龄分布在28岁到61岁之间(平均年龄为40.9岁),驾龄分布在1年到16年之间(平均驾龄6.6年).
3 变量解释
3.1自变量
表1汇总了自变量的相关信息.其中,FCW系统状态为关键的自变量,表征FCW系统是否开启.
根据交通流的间断与否,将道路类型划分为地面道路(包括主干道、次干道、支路等)及快速路(包括城市快速路、高速公路)两类.根据跟车行为发生的时间,将光照条件划分为白天、夜晚两类,道路类型及光照条件信息均依靠人工观看前向视频确定.
交通密度是表征交通状态的一个重要变量.自然驾驶实验的雷达可以同时捕获最多8个目标,利用雷达的数据估算交通密度信息[6],并将交通密度划分为3个等级:稀疏(<40辆·km-1)、中等(40~65辆·km-1)、密集(>65辆·km-1).
车速进一步反应了交通流的状态,将车速分为3个等级:慢速(20~40 km·h-1)、中等(41~65 km·h-1)、快速(>65 km·h-1).
考虑到雨天情况下的跟车行为片段极少,因此只对晴天状态下的跟车行为进行了分析.考虑到驾驶员数量有限,未将驾驶员的年龄、性别、驾驶经验作为自变量.
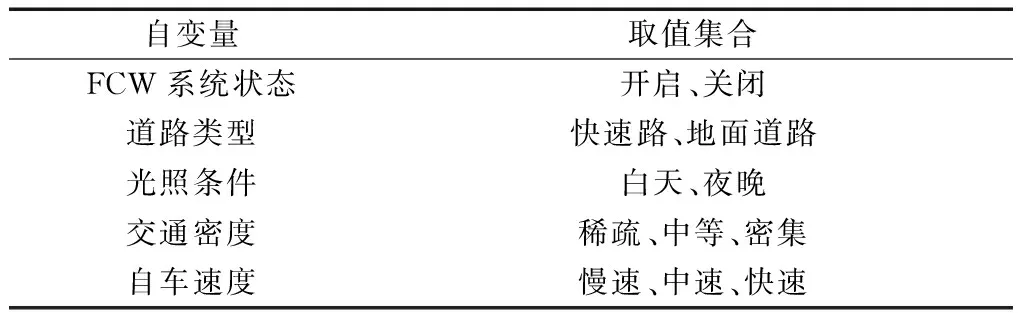
表1 自变量信息汇总
3.2因变量
考虑两项因变量:跟车车头时距及跟车反应时间.车头时距由跟车距离除以后车速度得到,其中跟车距离由雷达提供,后车速度由车辆总线提供.
跟车反应时间由一种图形方法确定,该方法由Gurusinghe等[7]提出,通过比较相对速度及后车加速度曲线来确定跟车过程中的反应时间.根据刺激-反应类跟车模型,跟车中后车的加速度由两车的相对速度决定,即相对速度的变化(称作刺激)会在一定时间的延迟后,引起后车加速度作对应的变化(称作反应),其中的延迟为跟车反应时间.如图2所示,相对速度曲线在AS达到一个波峰,在后车加速度曲线上与之对应的波峰为AR.AS与AR分别称作刺激点与反应点,两点间的时间间隔TA称作反应时间.
在一次跟车过程中,可以匹配多对刺激-反应点对,这些刺激-反应点对将作为跟车反应时间的分析单元.Ozaki[16]指出,在一次跟车过程中,反应时间并不是恒定的,并且可能与跟车距离、相对速度、前车加速度相关.因此,对每一对刺激-反应点对,其相应的跟车距离、相对速度、前车加速度信息也被记录下来,作为分析跟车反应时间时的额外自变量.
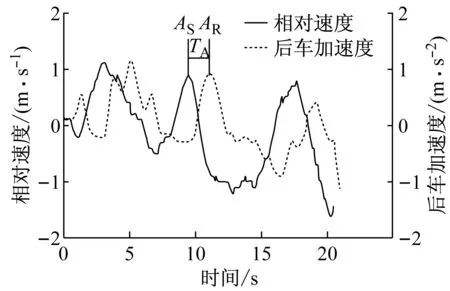
图2 跟车反应时间确定示意图
Fig.2Determining reaction time through identification of stimulus and response points
4 数据处理及模型构建
4.1跟车行为片段提取
基于雷达及车辆总线数据对跟车行为片段进行提取.表2汇总了已有研究中跟车行为提取所采取的准则,相关变量的含义如图3所示.
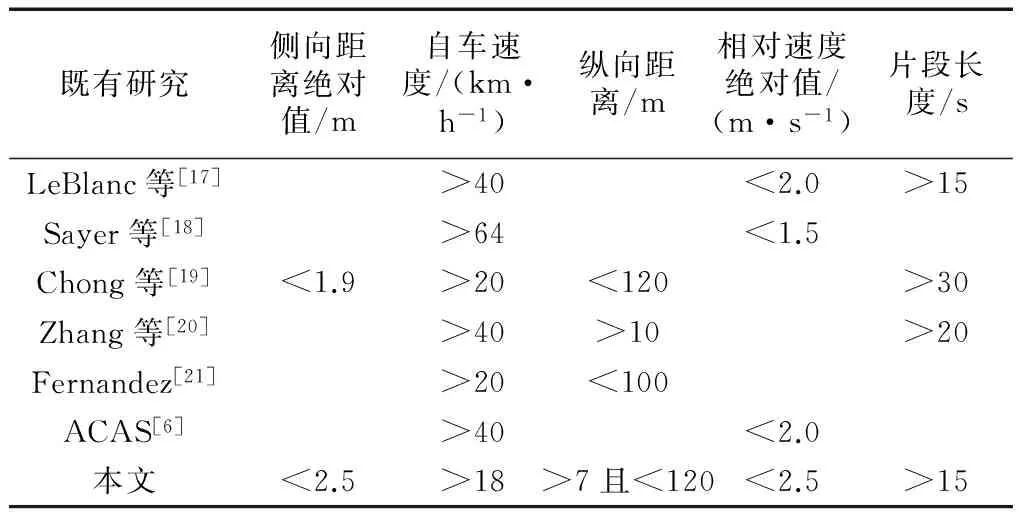
表2 既有研究中跟车行为片段提取准则
跟车行为片段提取关键在于各项准则阈值的设定.由于国内外交通环境、驾驶员驾驶行为可能存在差异,因此文献中的阈值需要根据本研究的数据特征进行修正.为此,基于文献中的跟车行为提取方法,结合前向视频、雷达、车辆总线数据,人工筛选出155个标准跟车片段,其各项参数取值范围见表3.
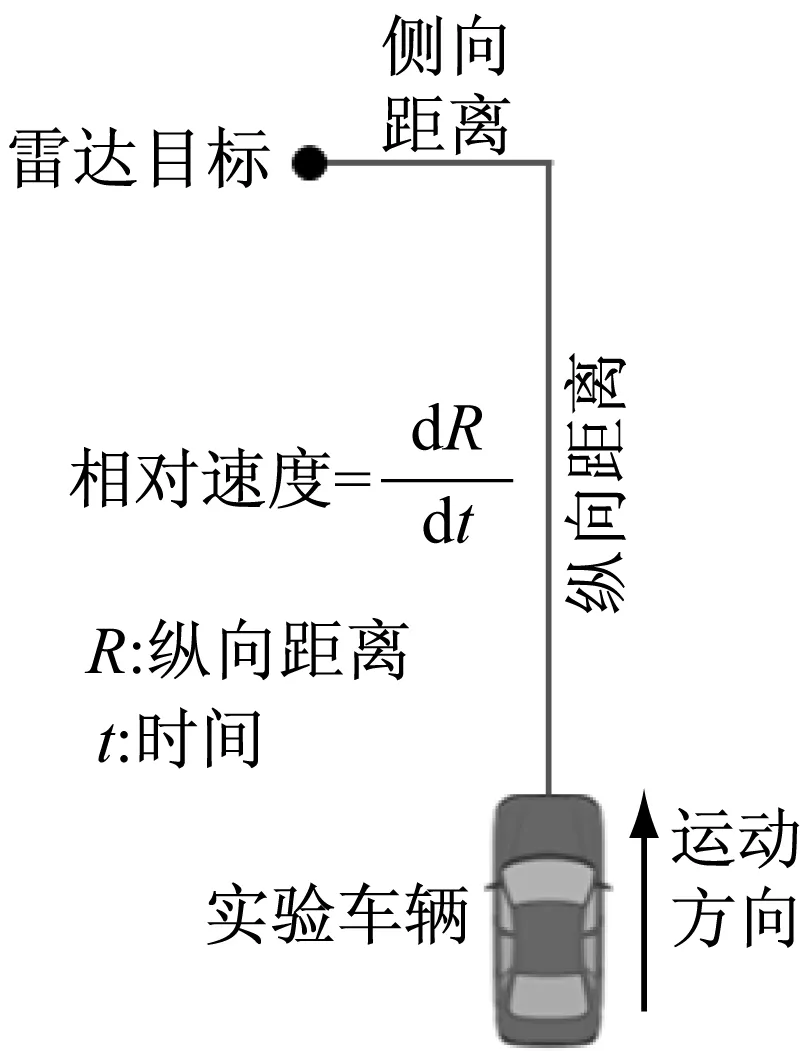
图3 雷达目标相对于实验车辆的位置及运动
根据标准跟车片段中各项参数的分布范围及既有文献中的阈值,确定各项跟车提取准则的阈值.最终的跟车行为片段提取准则如下:
(1) 侧向距离绝对值<2.5 m,该准则保证雷达目标与实验车辆在同一车道上.
(2) 7 m<纵向距离<120 m,且自车速度>18 km·h-1,这两项准则用以排除拥堵和自由流的交通流状态.拥堵的排除通过自车速度>18 km·h-1及纵向距离>7 m来实现;非自由流状态要求两车之间的距离不能过大,距离过大时,前车不再制约本车的驾驶行为.
(3) 纵向相对速度绝对值<2.5 m·s-1,相对速度的绝对值足够小以确保前后车处于稳定的跟车状态.
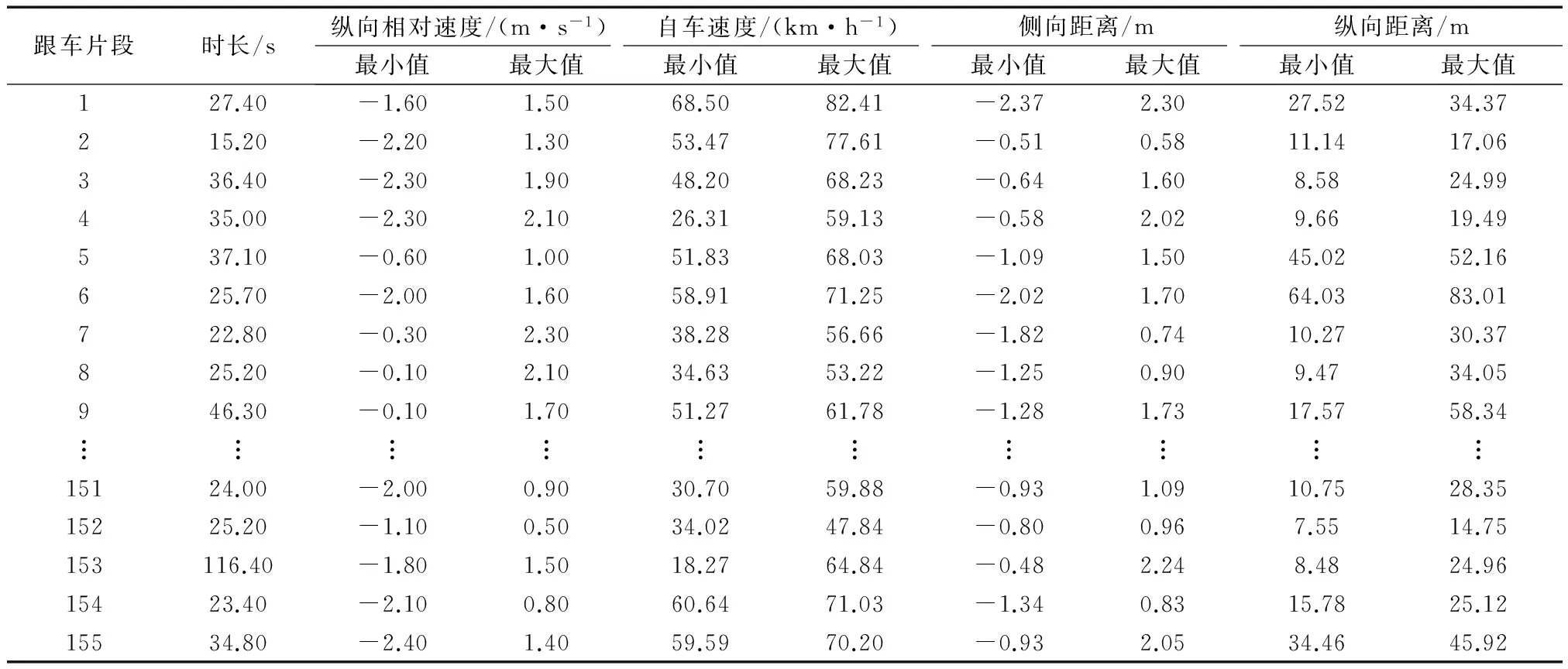
表3 标准跟车片段各参数取值范围
(4) 片段长度大于15 s,为了保证处于稳定的跟车状态,跟车片段不能过短.
使用上述方法,共提取出1 613个跟车行为片段.结合前向视频,对各片段进行验证,发现提取出的片段均为有效的跟车行为片段.
4.2线性混合模型构建
采用线性混合模型分析自变量对因变量的影响.线性混合模型的表达形式如下所示:

式中:y为因变量;X为固定效应矩阵;β为固定效应系数;Z为随机效应矩阵;γ为随机效应系数;ε为随机误差.
本文分析了19位驾驶员的跟车行为数据,若直接使用一般的线性模型,将违背不同观测之间相互独立的假设(同一驾驶员的数据可能存在相关性).因此,借助线性混合模型,将驾驶员作为随机效应,充分考虑不同驾驶员驾驶行为的差异.
5 结果与讨论
在提取出的1 613个跟车行为片段中,选取其中1 489个晴天状态下跟车片段进行分析.对每一个跟车片段,计算跟车过程中的平均车头时距,用于车头时距的分析.从相对速度及后车加速度曲线中提取出6 933对刺激-反应点并计算相应的跟车反应时间,用于跟车反应时间的分析.以上2个变量均是连续变量,利用SAS®9.2的MIXED过程建立混合线性模型,分析FCW系统状态对2个因变量的影响.显著水平α设为0.05.
5.1车头时距
结果表明,相对于FCW系统关闭状态下(车头时距最小二乘均值:1.68 s),FCW系统开启后驾驶员倾向于保持更长的车头时距(车头时距最小二乘均值:1.75 s).但这种差异在统计意义上并不显著(F(1, 12) =1.36,P=0.27).
分析同时发现,车头时距受到自车速度、光照条件、道路类型以及交通密度的显著影响,影响效果见表4.

表4 车头时距显著影响因素
表5汇总了已有研究中FCW系统对车头时距影响的结论.可以看出,在大部分研究中,FCW系统开启后,车头时距都倾向于变大.更大的车头时距留给驾驶员更多的时间应对前车状态的突变,有助于提高行驶安全性.
表5既有研究中FCW系统对车头时距影响结论汇总
Tab.5Result summary for studies concerning effects of FCW system on headway maintenance
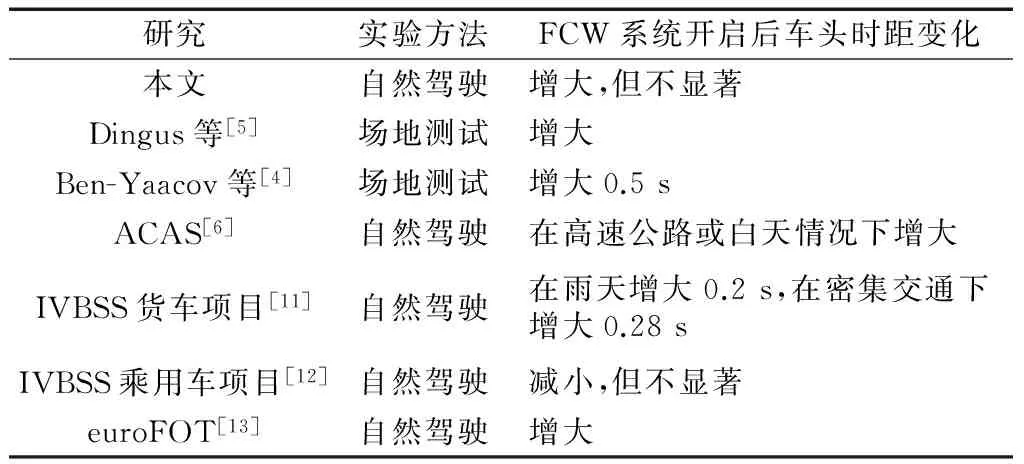
研究实验方法FCW系统开启后车头时距变化本文自然驾驶增大,但不显著Dingus等[5]场地测试增大Ben-Yaacov等[4]场地测试增大0.5sACAS[6]自然驾驶在高速公路或白天情况下增大IVBSS货车项目[11]自然驾驶在雨天增大0.2s,在密集交通下增大0.28sIVBSS乘用车项目[12]自然驾驶减小,但不显著euroFOT[13]自然驾驶增大
5.2跟车反应时间
在分析跟车反应时间时,除了表 1中的变量,还考虑了其他可能影响反应时间的自变量:相对速度(前车速度减后车速度)、跟车距离及前车加速度.分析时使用了相对速度和前车加速度的绝对值,因此相应地增加了2个表示两者符号的离散变量:相对速度符号、前车加速度符号.
结果表明,FCW系统状态对跟车反应时间有显著影响.FCW系统开启后,跟车反应时间由关闭时的1.55 s变为1.53 s,F(1,12)=5.51,P=0.036 9.此外,两项与FCW系统状态相关的交互效应也在统计意义上显著.如图4所示,在白天状态下,FCW系统的开启使得反应时间减少了0.13 s(下降8%),F(1,12)=5.93,P=0.03,然而这种差异在夜间并不显著;当相对速度为负值时(即后车比前车速度快),FCW系统的使用使得反应时间减少了0.09 s(下降5%),F(1,12)=7.16,P=0.02,而在相对速度为正值时这种差异并不明显.
驾驶员跟车反应时间对交通流稳定性有很大影响,交通流稳定性随反应时间的减少而增加[22].本文发现,在白天及后车速度大于前车速度的情况下,FCW系统的开启使得反应时间分别减少0.13 s与0.09 s.这表明,FCW系统有利于提高交通流的稳定性.
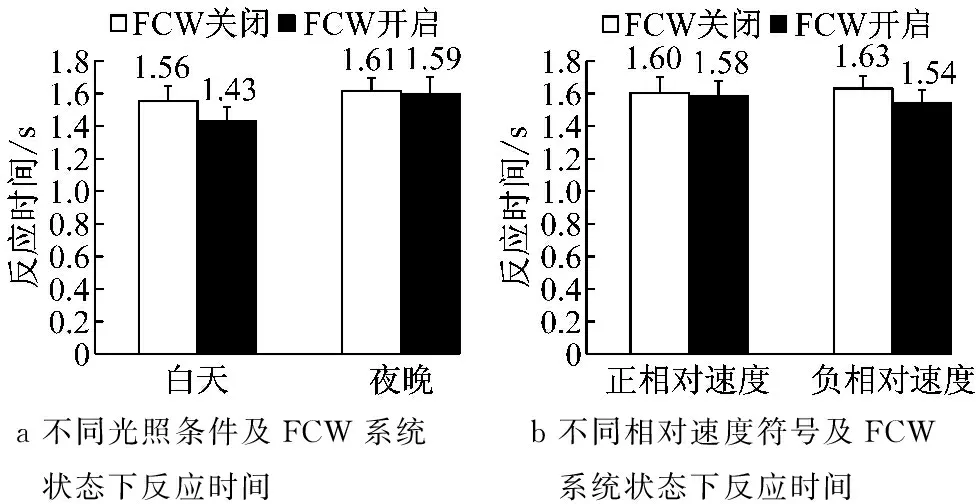
a不同光照条件及FCW系统状态下反应时间 b不同相对速度符号及FCW系统状态下反应时间
图4与FCW系统状态相关的交互效应
Fig.4Interaction effects involving FCW system state
Dewar等[23]指出,驾驶员反应时间由4个阶段组成:察觉、估计、决策和行动.以跟车过程为例,当两车的相对速度或相对距离发生变化时,驾驶员在察觉阶段感知到这种相对运动状态的变化,然后在估计阶段对两车相对速度或相对距离做出估计,以便于其在决策阶段选择合适的措施(如减速、加速、转向),决策后,驾驶员在行动阶段实施相应的操作,如踩刹车踏板.
如图5所示,在反应时间的4个阶段中,FCW系统可能缩短了驾驶员在察觉及估计阶段所花的时间,从而从整体上缩短了反应时间.这是因为:Mobileye®的FCW子系统具有实时显示车头时距的功能,这可能有助于驾驶员更快地观察和估计距离或速度的变化.
分析中也发现了许多其他变量对跟车反应时间有显著影响,包括相对速度、跟车距离、前车加速度、光照条件、道路类型和交通密度,影响效果见表6和7.

表6 显著影响反应时间的离散变量

表7 显著影响反应时间的连续变量
注:相对速度、跟车距离和前车加速度的单位分别为:m·s-1、m、m·s-2.

图5 FCW系统开启与关闭状态下的反应时间
Fig.5Reaction time with FCW system disabled and enabled
6 结语
本文利用自然驾驶数据研究了FCW系统对驾驶员跟车行为的影响.结果表明,FCW系统对驾驶员跟车车头时间的影响不显著,但FCW系统显著降低了驾驶员在跟车中的反应时间:白天状态下,反应时间减少了0.13 s;后车逼近前车时,反应时间减少了0.09 s.反应时间的缩短,将有助于提高交通流的稳定性.此外,本研究首次使用高真实度自然驾驶数据进行驾驶员跟车反应时间的提取及影响因素分析,并进一步确认了驾驶员跟车反应时间受跟车距离、相对速度、前车加速度、交通密度、道路类型、光照条件的影响.研究结果将有助于跟车反应时间建模及车辆配置FCW系统情况下的交通流仿真.
参考文献:
[1]McGehee D, Brown T, Lee J,etal. Effect of warning timing on collision avoidance behavior in a stationary lead vehicle scenario [J]. Transportation Research Record: Journal of the Transportation Research Board, 2002, 1803: 1.
[2]Soma H, Hiramatsu K. Driving simulator experiment on drivers’ behaviour and effectiveness of danger warning against emergency braking of leading vehicle [C]//Proceedings of the 16th ESV, Canada. Washington D C: National Highway Traffic Safety Administration (NHTSA), 1998.
[3]Ranney T A. Psychological factors that influence car-following and car-following model development [J]. Transportation Research, Part F: Traffic Psychology and Behaviour, 1999, 2(4): 213.
[4]Ben-Yaacov A, Maltz M, Shinar D. Effects of an in-vehicle collision avoidance warning system on short-and long-term driving performance [J]. Human Factors: The Journal of the Human Factors and Ergonomics Society, 2002, 44(2): 335.
[5]Dingus T A, McGehee D V, Manakkal N,etal. Human factors field evaluation of automotive headway maintenance/collision warning devices [J]. Human Factors: The Journal of the Human Factors and Ergonomics Society, 1997, 39(2): 216.
[6]Ervin R, Sayer J, LeBlanc D,etal. Automotive Collision Avoidance System field operational test report: methodology and results [R]. Washington D C: National Highway Traffic Safety Administration (NHTSA), 2005.
[7]Gurusinghe G, Nakatsuji T, Azuta Y,etal. Multiple car-following data with real-time kinematic global positioning system [J]. Transportation Research Record: Journal of the Transportation Research Board, 2002, 1802: 166.
[8]Taylor J, Zhou X, Rouphail N M,etal. Method for investigating intra driver heterogeneity using vehicle trajectory data: a dynamic time warping approach [J]. Transportation Research, Part B: Methodological, 2015, 73: 59.
[9]Fitch G M, Hanowski R J. Using naturalistic driving research to design, test and evaluate driver assistance systems [M]//Handbook of Intelligent Vehicles. London: Springer, 2012: 559-580.
[10]Zhang G, Wang Y, Wei H,etal. Examining headway distribution models with urban freeway loop event data [J]. Transportation Research Record: Journal of the Transportation Research Board, 2007, 1999: 141.
[11]Bao S, LeBlanc D J, Sayer J R,etal. Heavy-truck drivers’ following behavior with intervention of an integrated, in-vehicle crash warning system a field evaluation [J]. Human Factors: The Journal of the Human Factors and Ergonomics Society, 2012, 54(5): 687.
[12]Sayer J R, Bogard S E, Buonarosa M L,etal. Integrated vehicle-based safety systems light-vehicle field operational test key findings report [R]. Washington D C: National Highway Traffic Safety Administration (NHTSA), 2011.
[13]Kessler C, Etemad A, Alessandretti G,etal. European large-scale field operational tests on in-vehicle systems deliverable D11.3. final report [R]. Aachen: EuroFOT Consortium, 2012.
[14]Chandler R E, Herman R, Montroll E W. Traffic dynamics: studies in car following [J]. Operations Research, 1958, 6(2): 165.
[15]May A D. Traffic flow fundamentals [M]. New Jersey: Prentice-Hall, 1990.
[16]Ozaki H. Reaction and anticipation in the car-following behavior [J]. Transportation and Traffic Theory, 1993, 12: 349.
[17]LeBlanc D J, Bao S, Sayer J R,etal. Longitudinal driving behavior with integrated crash-warning system[J]. Transportation Research Record: Journal of the Transportation Research Board, 2013, 2365: 17.
[18]Sayer J R, Mefford M L, Huang R. The effect of lead-vehicle size on driver following behavior [R]. AnnArbor: The University of Michigan Transportation Research Institute, 2000.
[19]Chong L, Abbas M M, Medina Flintsch A,etal. A rule-based neural network approach to model driver naturalistic behavior in traffic [J]. Transportation Research, Part C: Emerging Technologies, 2013, 32: 207.
[20]Zhang L, Wang J, Li K,etal. Driver car-following behavior modeling using neural network based on real traffic experimental data[C]//15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual Meeting. New York: the Intelligent Transportation Society of America, 2008: 2230-2238.
[21]Fernandez A. Secondary tasks in steady state car following situations [D]. Göteborg: Chalmers University of Technology, 2011.
[22]Treiber M, Kesting A, Helbing D. Delays, inaccuracies and anticipation in microscopic traffic models [J]. Physica A: Statistical Mechanics and Its Applications, 2006, 360(1): 71.
[23]Dewar R E, Olson P L, Gerson J A. Human factors in traffic safety, second edition [M]. Tucson: Lawyers & Judges Publishing Company, 2007.
收稿日期:2015-11-18
基金项目:国家自然科学基金(51522810);“十二五”国家科技支撑计划(014BAG01B03)
中图分类号:U491
文献标志码:A
Impacts of Collision Warning System on Car-following Behavior Based on Naturalistic Driving Data
WANG Xuesong, ZHU Meixin, XING Yilun
(Key Laboratory of Road and Traffic Engineering of the Ministry of Education, Tongji University, Shanghai 201804, China)
Abstract:From 60 689 km of naturalistic driving data, 1 613 car-following events were identified. Two major parameters of car-following behavior were analyzed—time headway and reaction time. The results show that forward collision warning(FCW) did not have a significant effect on time headway; while FCW resulted in a 0.13 s decrease of reaction time in daytime driving, and a 0.09 s decrease when a following vehicle had higher speed than the lead vehicle.
Key words:forward collision warning(FCW); naturalistic driving study; car-following behavior; headway time; reaction time
第一作者: 王雪松(1977—),男,教授,工学博士,主要研究方向为交通安全规划与政策、驾驶行为与车辆主动安全、驾驶模拟器应用、交通安全管理、交通设施安全分析.E-mail:wangxs@tongji.edu.cn
