微气泡尾翼弹丸流场主动流控制研究*
2016-08-02郭亚超吴玉斌郝永平
郭亚超,吴玉斌,郝永平,赵 达,乔 磊
(沈阳理工大学装备工程学院,沈阳 110168)
微气泡尾翼弹丸流场主动流控制研究*
郭亚超,吴玉斌,郝永平,赵达,乔磊
(沈阳理工大学装备工程学院,沈阳110168)
摘要:面向主动流控制研发了基于硅酮橡胶材料的气泡型微致动器及其阵列技术。首先分析了微气泡薄膜变形高度与压力的关系,并对微致动器阵列下的尾翼弹丸进行了空气动力学仿真。结果表明:该微致动器扰动弹丸流场边界层的分离;在弹丸上对微致动器进行合理阵列布置,能够有效增大射程和减小横向偏移。因此,通过微致动器对弹丸的致动作用,可以实现对弹丸飞行流场的有益主动控制,达到增升减偏等控制目的。
关键词:硅酮橡胶;主动流控制;气泡型微致动器;增升减偏
0引言
当今世界各国弹箭发展的总趋势是增大射程,提高命中精度和打击效果。快速发展的微机电系统为主动流控制提供了新的方向。基于MEMS的主动流动控制技术在飞行器的增升减阻、改善气动性、提高机动能力、降低噪声等方面都具有重要应用潜力[1]。MEMS之所以成为人们广泛关注和研究的新热点,是因为结构复杂、体积庞大、质量大、代价高、耗能高的传统主动流控制已经不能满足当今精确打击弹药高速发展的世界现状。而文中微型气泡致动器严格按照MEMS工艺制作,质量轻、变形大、响应速度快、功耗小是该新型致动器的显著特点[2-3]。在弹丸上对微致动器进行合理阵列布置,对弹丸附近的绕流流场会产生不同的影响,由于弹丸在飞行过程中受空气动力的影响会偏离预定的弹道轨道,通过相应位置的微气泡对飞行弹丸工作,可对偏离轨道有效修正[4]。因此,该微型致动器通过影响弹丸的绕流流场,可实现对弹丸的增升减偏,从而提高弹丸的射程和打击精度。
1气泡型微致动器工作原理
弹丸在空气中飞行时,空气与弹丸之间存在相互作用力。在速度坐标系中,弹丸受到空气作用力时,垂直于气体来流方向的力称之为升力,平行于气体来流方向的力称之为阻力。因此,增升减偏是提高弹丸的打击射程和打击精度的有效途径,这就要求我们要打破弹丸附近原有的流场状态。文中采用的气泡薄膜材料是具有较好的耐腐蚀性、低模量、气密性良好、高延展率的硅酮橡胶,且该微型致动器利用MEMS技术工艺制作,并将不同尺寸和不同个数的气泡型微致动器阵列排布于弹丸前缘位置。在其非工作状态即未充入气体时,具有与弹丸前缘表面平齐一致的外形;当其在工作状态下即充入一定压力的气体时,气泡薄膜会因气体压力作用产生凸起变形,如图1所示。

图1 薄膜在气体压力作用下产生凸起变形
2薄膜受载荷变形仿真计算
利用ANSYS有限元分析软件,设计尺寸长8.0mm×宽2.5mm的微气泡致动器,对该尺寸薄膜进行静力仿真测试,薄膜材料硅酮橡胶的性能参数[5]如表1所示。

表1 MRTV-1的性能参数
通过对该薄膜输入不同的压力载荷,得到不同压力载荷下的薄膜鼓起高度,仿真结果如表2所示。

表2 微气泡薄膜不同压力条件下变形位移
根据上表数据绘制微气泡致动器压力-变形位移曲线如图2所示。

图2 微气泡致动器压力-变形位移曲线
通过表2和图2可知:微气泡薄膜随输入压力的增大,其薄膜鼓起高度即变形位移也随之增大,且在11Psi时,薄膜鼓起高度达到1.55mm。
3弹丸的空气动力学特性分析
3.1致动弹丸的气动特性分析
将12个尺寸长8.0mm×宽3.0mm的微气泡致动器阵列排布在弹丸前缘的一定位置,利用FLUENT流体动力学仿真软件,分别在超音速(见图3)、跨音速(见图4)、亚音速(见图5)条件下进行仿真计算。

图3 致动弹丸超音速压力云图
超音速时,气流流经弹体时,弹丸主要受到波阻的作用,微气泡在非工作状态下,超音速气流与弹丸的表面呈现平行状态;而当微气泡工作时,鼓起的微气泡会对弹丸流场产生一定扰动,会产生扰动压缩波,使附近气流速度下降,温度升高。且附体激波在弹体头部有所增强,微气泡迎风面有压力集中。
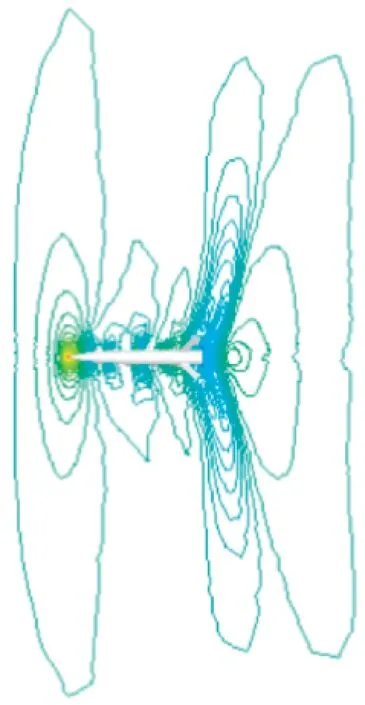
图4 致动弹丸跨音速压力云图
跨音速时,弹丸受到摩阻、涡阻、波阻的作用,并且跨音速气流中会出现局部超音速区,因此会产生激波的作用。一般情况下,在弹丸的附面层内总存在一个亚音速底层,激波的压强能在亚音速中传播。当微气泡致动器工作时,会引起附面层的分离,从而影响弹丸的流场状态。

图5 致动弹丸亚音速压力云图
亚音速时,弹丸所受到的阻力主要是摩阻和涡阻,微致动器作用时,弹丸附近的边界层提早与弹体分离,从而对弹丸的摩阻产生一定的影响;而将微致动器阵列排布于弹丸尾部分离区,通过其致动作用,可有效减小弹丸前后压差阻力即减小涡阻。
3.2致动弹丸的动力学仿真分析
为了分析致动弹丸弹道特性,以某尾翼炮弹为例,炮弹按照初速度540m/s、角速度15r/s、射角为45°,设计气泡厚度为0.1mm,长度为8mm,宽度为2.5mm、3.5mm、3.0mm,鼓起高度为0.8mm、1.0mm、1.2mm,个数为4、8、12,将其安装在弹丸前缘部分的一定位置,进行了外弹道动力学仿真,得出射程增量,以及横偏变化的近似整数数据。其中,横偏变化均为向左横偏,结果如表3所示。微气泡不同鼓起高度、不同个数、不同宽度致动下弹丸射程、横向偏移量的变化情况如图6、图7所示。

表3 致动弹丸的弹道数据统计表
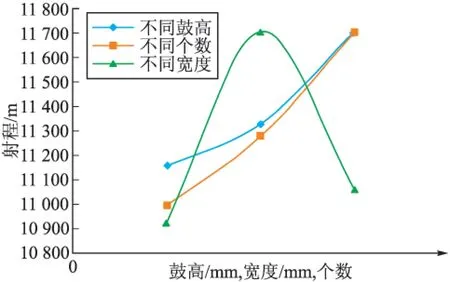
图6 不同致动情况下弹丸射程变化
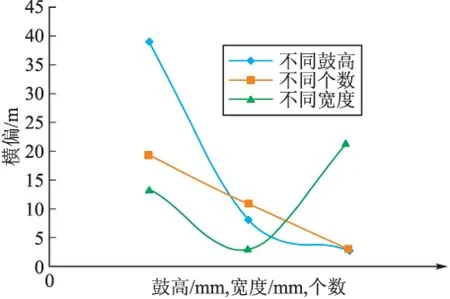
图7 不同致动情况下弹丸横偏变化
通过对有、无微气泡致动弹丸的动力学仿真计算,从其结果(表3、图6、图7)可以看出:
1)由图6可知:致动弹丸随气泡鼓起高度和个数的增大,其射程也随之增大;致动弹丸随气泡宽度的增大,射程随之先增大后减小。
2)由图7可知:致动弹丸随气泡鼓起高度和个数的增大,其横向偏移也随之减小;致动弹丸随气泡宽度的增大,横向偏移随之先减小后增大。
3)由表3可知:基于微气泡致动弹丸的弹道数据统计,弹丸的射程均得到增大,且弹丸的横向偏移也明显的减小。
4结论
文中重点探讨了有、无微气泡致动弹丸气动和动力特性影响以及不同尺寸和个数微气泡致动弹丸气动和动力特性影响,建立了8个气动模型。经仿真计算得知:在一定输入压力范围内,薄膜鼓起高度随输入压力的增大而增大;在弹丸的前缘部分阵列排布气泡型微致动器会对弹丸附近流场产生扰动,从而打破原有的流场状态,进而改变了弹丸的空气动力学特性;致动弹丸的射程均相对于原弹丸有一定程度的增大,且其横向偏移也相对于原弹丸明显的减少。微气泡个数为12,鼓起高度为1.2mm、宽度为3.0mm时其射程增大最多为1 004m,且其横向偏移量最小,横向偏移3m相比于原弹丸减少了39m,明显的提高了弹丸的精确度;微气泡个数为12,鼓起高度为1.2mm、宽度为2.5mm时其射程增大最小为220m,但其横向偏移减少了28m;微气泡个数为12,鼓起高度为0.8mm、宽度为3.0mm时其射程增大为456m,但其横向偏移减少最小为3m。因此,在满足全弹气动布局、飞行稳定的基础上,通过将不同尺寸、不同个数的微气泡合理的排布在弹丸头部,可以增加弹丸的射程,减小弹丸的横偏。也可以通过致动弹丸上不同位置的气泡,改变弹丸的轨道,从而精确的命中目标。
参考文献:
[1]马炳和, 王艳, 邓进军, 等. 一种用于主动流动控制的气泡致动器 [J]. 航空学报, 2007, 28(5): 1242-1246.
[2]HOCM,HUANGPH,LEWJ,etal.MEMS:anintelligentsystemcapableofsensing-computing-actuating[C]∥Proceedingsof4thInternationnalConferenceonIntelligentMaterials, 1998: 300-303.
[3]LEUTS,CHANGJR,LUPJ.Experimentalinvestigationofsideforcecontroloncone-cylinderslenderbodieswithflexiblemicroballoonactuators[J].ExperimentalThermalandFluidScience, 2005, 29(8): 909-918.
[4]邓进军, 马炳和, 苑伟政, 等. 用于三角翼气动控制的MEMS微致动器 [J]. 西北工业大学学报, 2004, 22(2): 217-220.
[5]GROSJEANC,LEEGB,HONGW,etal.Microballoonactuatorsforaerodynamiccontrol[C]∥ProceedingsoftheEleventhAnnualInternationalWorkshoponMicroElectroMechanicalSystems, 1998: 166-171.
*收稿日期:2015-05-27
作者简介:郭亚超(1990-),男,山东济宁人,硕士研究生,研究方向:弹药新概念和新原理。
中图分类号:TJ432.1
文献标志码:A
ResearchonMicrobubble-tailProjectileFlowFieldFlowControl
GUOYachao,WUYubin,HAOYongping,ZHAODa,QIAOLei
(SchoolofEquipmentEngineering,ShenyangLigongUniversity,Shenyang110168,China)
Abstract:In term of active flow control, a bubble-type micro-actuator based on silicone rubber material and its array technology were studied. Firstly, the relationship between micro-bubble membrane deformable height and pressure were analyzed, and the projectiles at empennage in the array were made aerodynamic simulation. The results show that the micro-actuator disturbance flow field boundary layer separates the projectile; the projectile in the micro actuator array arrangement is reasonable, can effectively increase the range and reduce the lateral offset. Therefore, actuation generated by micro actuators on projectile can achieve active control of projectile’s flight flow field so as to realize lift eccentricity and other control purposes.
Keywords:silicone rubber; active flow control; bubble-type micro actuator; rising minus partial
