UAV组合导航半物理仿真系统设计与研究*
2016-08-02胡奕明牛江龙
胡奕明,卢 虎,牛江龙
(空军工程大学信息与导航学院,西安 710077)
UAV组合导航半物理仿真系统设计与研究*
胡奕明,卢虎,牛江龙
(空军工程大学信息与导航学院,西安710077)
摘要:为了验证GNSS/MLS/VNS/INS/RA构成的UAV五组合导航系统的航电综合、导航解算算法以及飞行控制律性能,设计了集机载导航传感器实物、物理效应器、飞行仿真系统、无人机地面站模拟系统、试验总控评估系统、视景与展示系统等的UAV导航与控制半物理仿真试验系统平台。平台能够考核组合导航系统的性能和功能。
关键词:组合导航;航电综合;半物理仿真系统;飞行仿真
0引言
文中提出将卫星导航系统(GNSS)、微波着陆系统(MLS)、惯性导航系统(INS)、无线电高度表(RA)以及视觉导航系统(VNS)综合运用,构成“UAV五组合导航系统”。该系统能够满足无人机航路导航及着陆引导的需求。
为了验证5组合导航系统的性能[1],构建了无人机导航与控制半物理仿真系统。该仿真系统是以无人机机载导航传感器、机载组合导航计算机为核心的闭环半物理仿真试验系统,是研究和试验机载设备航电综合、导航算法优化等的有效平台。
1系统设计
基于5组合导航系统构建的无人机导航与控制半物理仿真试验系统是对5组合导航系统的仿真模拟,其系统架构除了尽可能的逼近真实系统外,还兼顾了教学功能。整个半物理仿真系统的组成和结构如图1所示。整个系统分为8大子系统,包括:1)黄色:机载导航与传感实物;2)蓝色:物理效应器;3)绿色:教学系统;4)橙色:飞行仿真系统;5)白色:试验总控与评估系统;6)粉色:航电总线子系统;7)灰色:无人机地面站模拟系统;8)紫色:视景仿真与展示系统。
在本半物理仿真系统环境中,机载设备的卫星接收机、惯性导航系统、微波着陆机载接收机、无线电高度表、视觉传感器采用真正的物理部件,机体平台采用计算机仿真。各导航子系统相对应的地面设备采用物理效应器模拟器形式。
系统工作流程为:无人机地面站模拟系统或操纵台手柄实时操作生成飞行轨迹,送给飞行仿真系统飞控计算机,飞控计算机驱动舵机仿真机和飞行动力学仿真机产生飞机姿态、位置、角速度、加速度、迎角、侧滑角、高度等原始信息发送给物理效应器,驱动物理效应器产生相应的物理效应,来激励各类导航系统,进而由各类导航系统产生飞机的姿态、位置、加速度、角速度、高度、速度等信息发送给飞行控制系统,构

图1 系统结构框图
成闭环仿真系统。
无人机地面站在仿真过程中一方面可以监视无人机的飞行状态,控制飞机的飞行模式。另一个方面还可以设定无人机的飞行轨迹,监控无人机的飞行航迹;此外,地面站系统还可以使用任务控制系统利用红外、可见光设备监视地面的车辆,完成侦察任务。
2系统实现
2.1飞行仿真系统
飞行仿真系统主要完成飞机动力学系统、舵机系统、控制系统的仿真,解算飞机六自由度动力学模型、传感器模型、舵机模型、飞行控制律实现对无人机飞机系统和控制系统的实时仿真[2-4]。
2.1.1硬件设计
飞行仿真系统主要由两部分组成,一是仿真主控机,二是仿真目标机。其中仿真目标机又包括3个部分:1)飞行动力学仿真计算机;2)飞控计算机仿真机;3)舵机仿真机。
仿真主控机和仿真目标机的连接关系如图2所示。
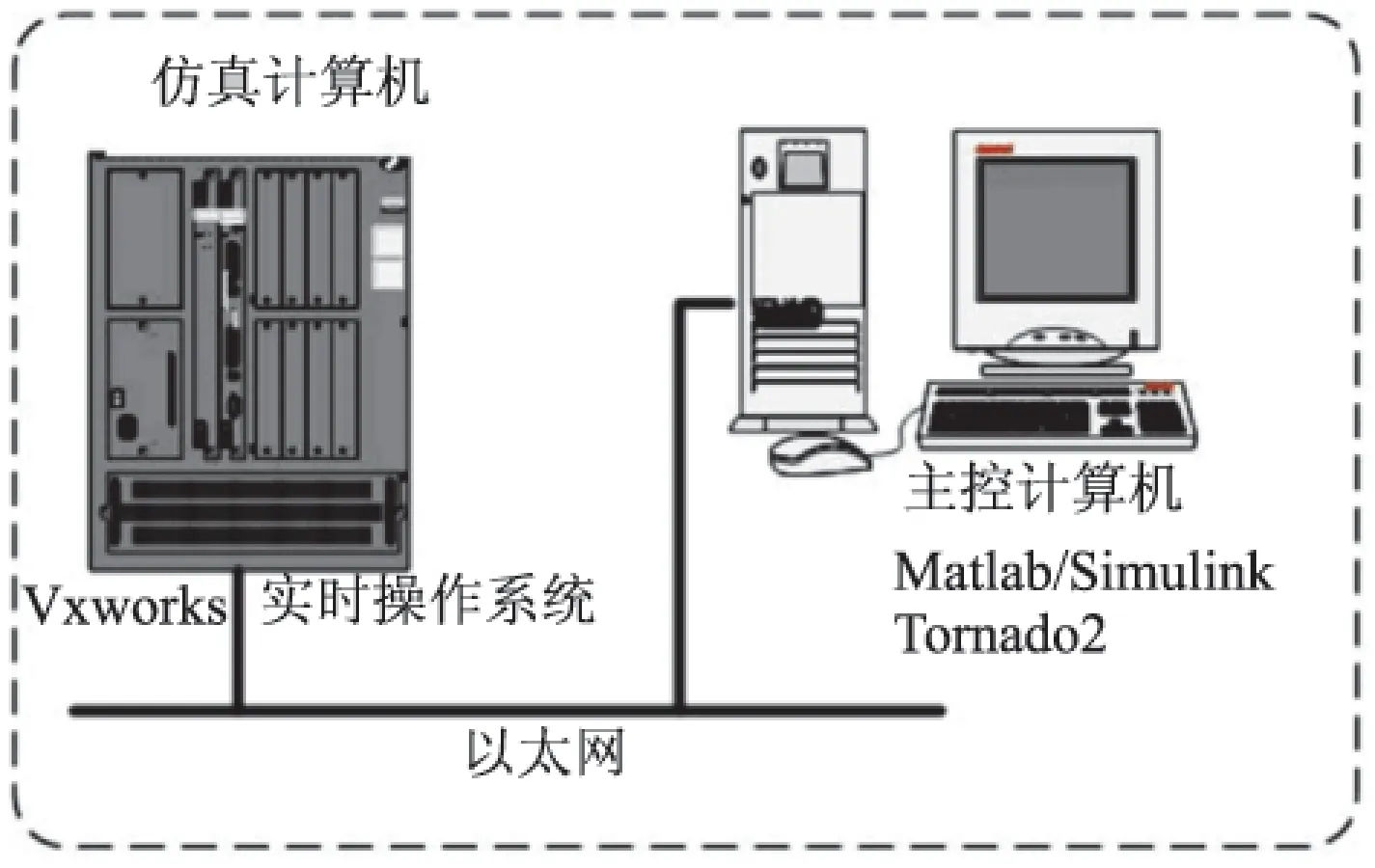
图2 主控机和目标机架构
仿真目标机是整个系统的核心,采用VxWorks嵌入式实时操作系统,无人机动力学仿真模型就在这里运行。仿真计算机采用开放的、高可靠性PCI总线,具有1553B、RS485、千兆以太网卡等数据通讯接口。同时仿真过程中产生的各种数据也由该仿真目标计算机回传给主控计算机,用于仿真结果的记录与分析。
主控计算机运行仿真管理与控制软件完成对仿真目标计算机的控制,同时还运行Matlab/Simulink、数据采集与记录软件、数据分析与绘图软件、仿真故障参数与仿真曲线显示软件。实现仿真模型的搭建、模型代码的自动生成、下载和仿真数据存储与分析处理等功能。主控计算机与实时仿真目标计算机通过1 000 M以太网通讯。
2.1.2软件设计
主控机的仿真管理与控制软件和目标机的仿真软件共同实现了仿真管理与控制功能,其分层结构如图3所示。

图3 仿真机软件分层逻辑结构
由图3可知,按照功能、信息交互方式不同可将仿真主控机软件分为人机交互界面应用层、中间层、请求目标机服务层、通用网络传输层、物理通讯层等5层。仿真目标机软件分为目标机服务应用层、目标机服务请求响应层、目标机服务请求解析层、目标机客户端管理层、通用网络传输层、物理通讯层等6层。
2.2组合导航系统
文中的五组合导航系统设计中关键问题有两个,一是组合导航系统传感器射频综合问题,二是组合导航系统信息融合问题。由于文章篇幅有限,在此仅将第一个问题做以介绍。
现代战机的航空电子系统发展[5]经过了分离式、集中式、联合式的发展阶段,如今已进入了综合架构的时期,未来综合航空电子系统的关键技术之一就是传感器的射频综合技术。美军经过“宝石柱”和“宝石台”计划已初步实现了综合航电系统中的传感器射频综合,但我国在这方面还相对落后,其中许多关键技术有待突破。
传感器的射频综合主要内容包括天线(孔径)综合和射频综合等内容。孔径综合即把无人机上的几十付天线按频段功能归并,重构成数量尽可能少的天线。射频综合即是采用模块化、标准化的设计方法,把各个子系统的各种功能重新划分、组合,将传感器前端组件、信号处理组件和数据处理组件等,组成具有资源共享、可重构和通用化的新型系统。
文中研究的组合导航系统是将5种导航系统进行综合,其中有3种属于射频传感器系统(GNSS、MLS和RA),其中MLS测角部分RA都工作在C波段(4 000~5 090 MHz),而MIS精密测距部分采用的是L波段(962~1 213 MHz)。按照航空电子系统的射频综合设计要求,文中提出将L波段精密测距器工作频段提高到C波段,以实现MLS的测角测距同频运用的射频综合,使MLS组成设备得到综合集成,减少装机天线种类和机载设备的体积重量。另外,还研究了同处于C波段工作的RA与MLS射频综合中涉及的关键技术问题。因此,文中研究了两个方面问题,一是MLS内部孔径综合,二是MLS和RA射频前端综合。
2.2.1MLS内部孔径综合——测角测距同频实现
MLS测角测距同频实现,需要改进设计MLS地面设备和机载设备,包括地面方位/距离设备、地面仰角设备和机载设备。地面和机载设备产生处理的测角测距信息是在同一频段以时分方式发送和接收的,其中地面方位/距离设备是设计的重点。
1)地面方位/距离设备
方位/距离设备由天馈线系统、收发分机、监控分机、无线通信链路终端、电源和辅助设备等组成,如图4所示。

图4 方位/距离设备组成框图
信号发射时隙,收发分机内的频率合成器输出200个波道中的一个指定发射频率,由监控分机产生的数据字和测距应答基带信号进行BPSK调制,形成的BPSK中频调制信号送到收发分机进行上变频和功率放大,产生所需的射频信号;监控分机控制天线转换开关,适时地把射频信号送到数据天线上完成信号的辐射。扫描天线辐射的信号是没有经过调制的射频信号,在扫描天线工作时隙,天线选择开关把载波射频信号接到扫描天线,同时监控分机控制扫描天线产生窄波束并完成“往”、“返”扫描。
信号接收时隙,数据天线接收机载设备发来的测距询问信号,经过收发转换开关、收发分机滤波、下变频得到中频信号,送到监控分机进行采样、码型相关等处理,识别出测距询问信号后,经过固定延时产生测距应答信号。测距采取的是码相关测距方式,具有精度高、抗干扰能力强等特点。
方位相控阵天线是水平一维阵列天线,由天线阵元、功分器、移相器、监测波导、温度补偿检波器和支撑架等部分组成。发射机的射频信号送到功率分配器将功率分配到各移相器,移相器对信号进行相位控制并将其馈送给天线阵元,使各阵元信号功率和相位按一定的规律辐射,从而形成所需的辐射场型。方位/距离设备的数据天线是垂直方向天线阵,是两个22个振子构成的双列阵,其阵面和幅相分配设计与方位天线阵元设计基本相同,即天线垂直面辐射特性与方位扫描天线垂直面辐射特性基本一致。
2)机载设备
机载设备由天线、收发通道、数据处理模块和电源组成,与地面设备配合工作完成测角和测距,如图5所示。

图5 机载设备组成框图
在引导信号覆盖范围内,机载设备和地面设备同步工作。在角度引导时隙,机载设备接收处理地面设备发射的角度引导信号,进行同步和译码,正确的识别并跟踪扫描波束的往返脉冲,并对基本数据作相应的译码和存储,提供精密的数据和角度引导信息;机载设备产生测距询问信号,通过发射通道和天线发射,由地面设备接收识别后返回测距应答信号,机载设备通过接收、处理和计算询问与应答信号的延迟时间来完成距离测量。
2.2.2MLS/RA射频综合设计
MLS和RA的射频综合中接收通道可以分为天线接口、接收模块、信号处理以及交换网络模块,见图6。
从图6可见,接收模块与中频信号处理是通用化、模块化综合设计的重点。
天线接口设计:天线接口主要完成接收模块与天线间的接口适配。完成对接收信号的预处理工作,主要包括滤波器、低噪声放大器、信号切换等。
接收模块设计:设计一种多模式的接收通道,能够同时满足两种功能的需求。关键在于解决无线电高度表和微波着陆对接收机的不同要求或者说矛盾之处,特别是接收机通道带宽、接收机AGC响应时间等系统参数。
交换网络设计:系统中存在两个信号交换网络,一是射频信号交换网络,二是中频信号交换网络。交换网络在系统的控制下,实现对信号的交换,对于射频信号交换网络选择PIN电子开关实现。
3总结
基于未来综合航空电子系统的发展方向,设计了无人机五组合导航系统及半物理仿真平台。平台具有很强的实时性、可靠性、稳定性和良好的扩展性。在组合导航系统设计和航电综合以及飞控系统设计验证研究方面可大大提高研发效率和可靠性。
参考文献:
[1]白云, 黄孝文, 赵俊峰. 捷联惯导半实物仿真测试系统研究 [J]. 航天控制, 2010, 28(3): 56-59.
[2]邢广华, 刘建业, 孙永荣, 等. 多信息融合组合导航半物理仿真系统设计与实现 [J]. 航天控制, 2005, 23(2): 64-68.
[3]张亚崇, 陆志东, 雷宏杰. 实时分布式容错综合导航仿真系统技术研究 [J]. 弹箭与制导学报, 2009, 29(6): 25-28.
[4]高伟, 陈鸿, 刘雅娟. 基于半实物仿真的某型机载电子设备训练模拟器设计 [J]. 现代计算机, 2013(12): 74-76.
[5]李军政. 航空综合射频传感器研究 [J]. 现代导航, 2012(5): 368-372.
*收稿日期:2015-03-31
基金项目:国家自然科学基金(61174194,61473308)资助
作者简介:胡奕明(1970-),男,陕西西安人,讲师,博士,研究方向:组合导航与数据融合。
中图分类号:V249
文献标志码:A
Design and Research of UAV Integrated Navigation Semi-physical Simulation System
HU Yiming,LU Hu,NIU Jianglong
(Information and Navigation College, Air Force Engineering University, Xi’an 710077, China)
Abstract:The semi-physical simulation system was designed to test GNSS/MLS/VNS/INS/RA integrated navigation system and algorithms. The system is a complex UAV loop semi-physical simulation system which integrates airborne sensor, physical effect machine, flight simulation, the UAV ground station analog system, testing control and evaluation system, visual and displaying system and avionics electronic system.
Keywords:integrated navigation; integrated avionic system; semi-physical simulation system; flight simulation
