一种导弹终端侵彻多约束最优制导方法
2016-07-29李强卢宝刚王晓辉王永海庄凌北京航天长征飞行器研究所北京100076
李强,卢宝刚,王晓辉,王永海,庄凌(北京航天长征飞行器研究所,北京100076)
一种导弹终端侵彻多约束最优制导方法
李强,卢宝刚,王晓辉,王永海,庄凌
(北京航天长征飞行器研究所,北京100076)
摘要:针对地面目标精确打击及高效毁伤的需求,提出一种满足终端位置、落角及攻角约束的最优制导方法。利用比例导引项、落角约束项及加速度约束项保证终端命中多种约束条件,并且设计制导阶次实现全程加速度指令的优化分配,保证命中目标时的加速度指令收敛为小量。通过仿真计算验证了该制导方法能够满足精度、落角及攻角等终端约束条件,同时具有更好的加速度指令特性,有利于增强导弹的精确毁伤能力。
关键词:飞行器控制、导航技术;侵彻多约束;最优制导;解析解;制导特性
0 引言
比例导引制导律被证明是一种十分有效的导引方法,能够实现对目标精确命中[1-2]。在此基础上发展得到的具有角度约束的弹道成型制导律,同时实现终端位置及落角的控制,进一步改善了制导律特性。随着作战任务的复杂化及多样化,对高价值的地面硬目标及地下、半地下目标提出了侵彻攻击要求,需要在保证命中精度和落角的同时,尽量减小命中攻角,实现弹体侵彻增加战斗部的毁伤效果,更好地完成对目标的高效摧毁。
基于比例导引制导律,Zarchan[3]以法向加速度平方积分最小为目标函数,得到了满足位置及角度约束的终端大落角制导律;Ryoo等[4-5]引入剩余飞行时间得到了满足终端落角约束的弹道成型制导律,并对制导精度的影响进行了分析;文献[6-7]在弹道成型制导律的研究基础上,考虑终端攻角对侵彻攻击的影响,通过调整性能函数对制导律进行了改进,得到了拓展弹道成型制导律;Lee等[8]引入弹体动力学建立包含弹体法向加速度的状态方程,得到了满足终端落角及法向加速度约束的考虑动力学的弹道成型制导律,利用加速度与攻角对应关系实现终端攻角收敛,而尚未对制导指令特性进行详细分析。只考虑落角约束的制导律可能使得终端攻角较大,导致导弹跳弹、甚至折断等现象;拓展弹道成型制导律通过控制终端指令收敛间接实现攻角控制,然而弹体存在多个动力学滞后环节,因此方法本质上并不能保证攻角收敛;考虑动力学的弹道成型制导律从方法上保证了终端加速度归0,但并没有考虑指令变化的影响,其终端指令仍然很大,使得控制系统处于过渡过程,甚至出现控制饱和,弹体姿态不稳定,这对侵彻攻击也是十分不利的。因此有必要提出一种侵彻多约束最优制导律,在满足终端位置、落角及加速度约束条件下,同时保证加速度指令的有效收敛。
本文基于弹道成型制导律的推导思想,在保证终端位置及落角约束条件下,同时对性能函数和状态变量进行改进,实现终端最优制导律的推广。引入1阶等效动力学环节,增加弹体法向加速度状态量,约束终端加速度收敛;改进性能函数形式,尽量减小飞行终端加速度指令,从而形成一种满足终端位置、落角及加速度约束,并且保证终端指令为小量的侵彻多约束制导律。
1 制导律建模与推导
假设导弹沿弹目线方向上的速度分量为常值,则有考虑1阶等效动力学滞后的系统模型[9]如图1所示。
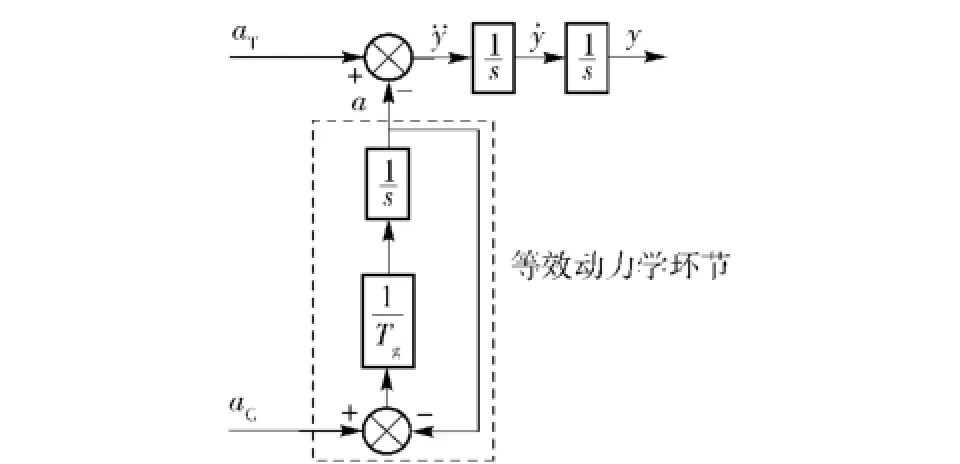
图1 考虑1阶等效动力学的制导系统模型Fig.1 Guidance system model with the first order dynamics

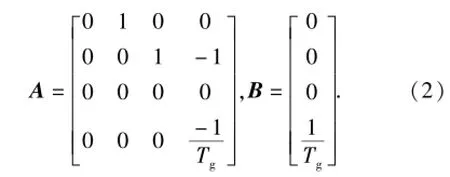
系统矩阵A和控制矩阵B为
对于具有终端位置、落角及加速度约束的制导问题,终端约束表示为
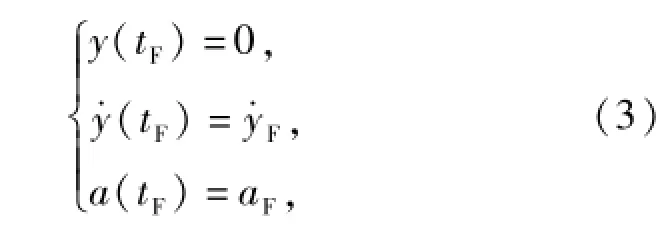
式中:tF为终端时刻;为终端时刻弹目速度;aF为终端时刻导弹的法向加速度。
则终端约束条件

式中:

确定目标函数为

保证终端加速度指令收敛为小量,选取控制权矩阵为时变函数:

式中:tgo=tF-t;n为制导阶次。则问题的最优解[10]为

式中:

将(5)式代入(9)式求解得

另外有
式中:
则得到最优控制律为

式中:


式中:vr为导弹飞行速度。则得到适于工程应用的终端侵彻多约束制导律为
2 制导律解析特性研究
由制导律的推导过程可知,对于考虑等效制导动力学的终端多约束制导律,可以将基于任意时刻t的系统状态x(t)到终端状态x(tF)的状态转移过程表述为从t=0时刻的系统状态x(t0)到终端状态x(tF)的状态转移过程,则可以得到基于初始状态的制导指令解析表达形式[12-13]。
从t=0时刻到t=tF时刻,则此时G矩阵为
得到基于初始条件的解析加速度指令为

式中:

研究初始速度指向误差ε和落角约束qF对指令特性的影响,代入(0)=-vrε,=-vrqF对(18)式进行整理有
加速度指令是由初始位置偏差项aC(t)|y(0)、初始速度指向误差项 aC(t)|ε、初始弹体加速度项aC(t)|a(0)和终端期望落角项aC(t)|q4部分组成。
F对于不同的制导阶次n,引入无量纲时间=t/tF,图2~图4给出了各项无量纲加速度指令的变化曲线。
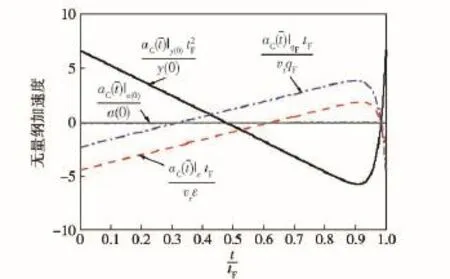
图2 n=0时各项无量纲加速度指令变化Fig.2 Various dimensionless acceleration commands for n=0
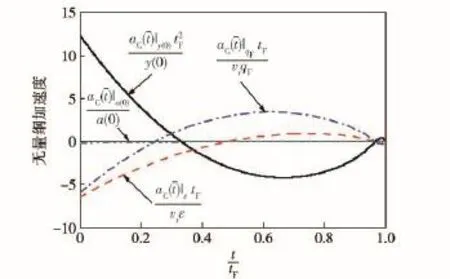
图3 n=1时各项无量纲加速度指令变化Fig.3 Various dimensionless acceleration commands for n=1
通过对仿真结果的分析可以得到如下结论:
1)终端多约束制导律在保证终端位置及落角精度的同时,还能实现弹体加速度归0;
2)制导阶次n=0时,各项指令在飞行终端逐渐增大;当制导阶次n>0时,各项指令在飞行终端有收敛的趋势,并且随着n越大,终端指令的收敛趋势越明显;
3)保证飞行终端指令收敛为小量,则要求n>0,此时指令较小且变化平缓,能够保证弹体进入稳态,提高制导精度,并且有效减小命中攻角;然而n越大,对初始弹体过载能力的要求越高,并且考虑噪声影响时对制导性能影响也越大,因此n的选择需要结合实际情况进行综合考虑。
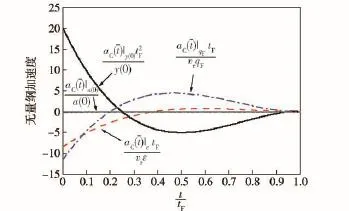
图4 n=2时各项无量纲加速度指令变化Fig.4 Various dimensionless acceleration commands for n=2
3 制导阶次对制导性能影响研究
3.1制导权系数特性分析
不同的制导阶次n,终端最优制导律的位置、角度和加速度制导权系数Np、Nq和Na随无量时间的变化曲线如图5~图7所示。
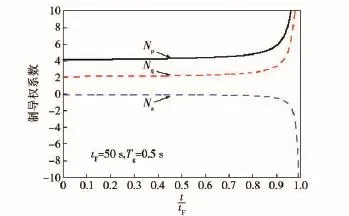
图5 n=0时制导权系数曲线Fig.5 Guidance weight coefficients for n=0
随着制导阶次n的变化,Np、Nq和Na的取值也不同:
1)当n增大时,Np、Nq和Na取值也都增大,制导律增益增加,相应的加速度指令增大;
2)当剩余飞行时间tgo=tF-t较大时,3项制导权系数都基本维持为常值不变,而逐渐接近目标时制导权系数增大趋势明显;
3)相比于Np和Nq,Na在制导初期相对较小,基本不起作用,tgo不断减小,Na则迅速增大,以保证终端的加速度归0.
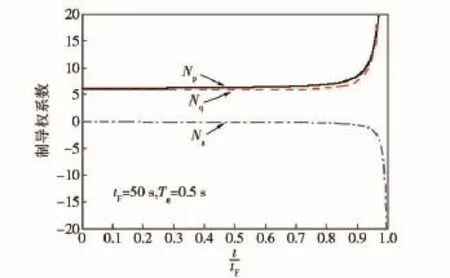
图6 n=1时制导权系数曲线Fig.6 Guidance weight coefficients for n=1
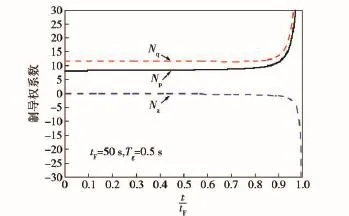
图7 n=2时制导权系数曲线Fig.7 Guidance weight coefficients for n=2
3.2弹道特性分析
确定典型角度相对关系满足qF/ε=-2,Tg/tF= 1/40,则有不同 n值时的弹道特性如图8~图11所示。
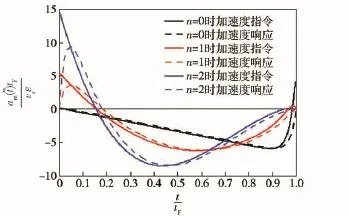
图8 不同n时无量纲加速度曲线Fig.8 Dimensionless accelerations for different n
从上述的仿真结果可以得到如下结论:
1)终端多约束制导律能够同时较好地满足终端位置、落角及加速度约束,达到以指定角度命中目标,并实现终端加速度归0;
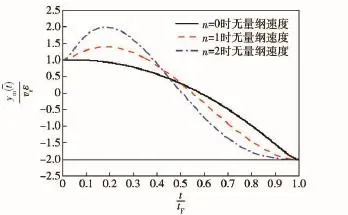
图9 不同n时无量纲速度曲线Fig.9 Dimensionless velocities for different n
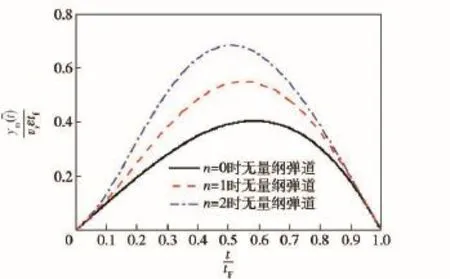
图10 不同n时无量纲弹道Fig.10 Dimensionless trajectories for different n
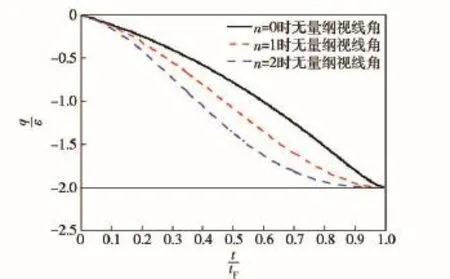
图11 不同n时无量纲视线角曲线Fig.11 Line of sight angles for different n
2)不同n条件下,终端加速度都能够收敛到0;终端加速度指令在n=0时并不收敛,而随着n的逐渐增大,终端加速度指令的收敛趋势增加,终端指令明显减小,同时初始时刻的指令幅值增大,与解析解分析结论相一致;
3)图9中,随着n的增大,初始段的无量纲速度明显增大,并且在终端都收敛到-2,即y·m(tF)= -2vrε,则q(tF)=-y·m(tF)/vr=-2ε=qF,保证了终端落角精度,与图11中的无量纲视线角结论相同。
4 仿真对比分析
确定制导阶次n=1,将终端侵彻多约束最优制导律与拓展弹道成型及考虑动力学的弹道成型制导律的加速度指令及响应特性进行对比,如图12和图13所示。
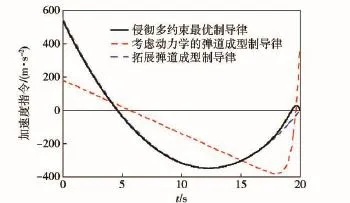
图12 不同制导律的加速度指令变化曲线Fig.12 Acceleration command curves for differentguidance laws
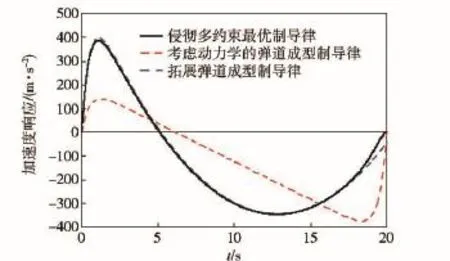
图13 不同制导律的加速度响应变化曲线Fig.13 Acceleration response curves for different guidance laws
从3种不同制导律的仿真结果可以看出,考虑动力学的弹道成型制导律终端加速度响应为0,而加速度指令则较大,并且变化较快,这是由于该制导律只是将实际终端加速度作为约束进行设计,而并没有考虑终端指令的变化情况;由于从相同的初始状态变化到终端状态所需能量是相同的,该制导律的初始段加速度较小,因此导致末段加速度需求较大,对弹体控制提出了较高要求。终端侵彻多约束最优制导律的制导权系数在接近目标前的大部分时间内都基本维持为常数,与拓展弹道成型制导律相同。因此二者在接近目标前有比较接近的指令及响应特性,而在接近命中目标时制导权系数迅速增大,保证了终端加速度指令的收敛。
相比于考虑动力学的弹道成型和拓展弹道成型制导律,侵彻多约束最优制导律能够控制终端弹体加速度归零,并且保持弹道终端加速度指令为小值,维持弹体姿态稳定,降低控制饱和的可能,有效实现攻角收敛;同时利用制导权系数的时变特性,实现了制导指令的优化分配,保证了加速度指令在终端具有收敛趋势,并通过弹体加速度状态量约束实现了终端加速度归0.在满足落点及落角精度下,具有更好的加速度指令及响应特性。
5 结论
对地面高价值硬目标,地下、半地下重要目标的精确打击和高效毁伤已经成为现代制导武器的核心技术和重要指标,满足多种终端约束条件,并且保持弹体姿态平稳,是提高导弹侵彻攻击性能的关键。本文提出的终端多约束最优制导方法,通过约束条件推广和性能函数改进,利用制导阶次优化设计,能够保证终端命中目标位置、落角及攻角约束要求,实现终端制导指令收敛,对精确毁伤制导方案设计具有一定的参考价值。
参考文献(References)
[1] Gu W J,Zhao H C,Zhang R C.A three-dimensional proportional guidance law based on RBF neural network[C]∥7th World Congress on Intelligent Control and Automation.Chongqing,China:IEEE,2008:6978-6982.
[2] 孙未蒙,郑志强.多约束条件下对地攻击的最优制导律[J].兵工学报,2008,29(5):567-572. SUN Wei-meng,ZHENG Zhi-qiang.Optimal guidance law with multiple constraints in ground strike[J].Acta Armamentarii,2008,29(5):567-572.(in Chinese)
[3] Zarchan,P.Tactical and strategic missile guidance[M].4th ed. Reston,VA:AIAA,2002.
[4] Ryoo C K,Cho H,Tahk M J.Time-to-go weighted optimal guidance with impact angle constraints[J].IEEE Transactions on Control Systems Technology,2006,14(3):483-492.
[5] Ryoo C K,Cho H,Tahk M J.Optimal guidance laws with terminal impact angle constraint[J].Journal of Guidance,Control and Dynamics.2005,28(4):724-732.
[6] 李强,夏群利,何镜,等.基于大气预估的再入飞行器机动减速制导方法[J].兵工学报,2013,34(9):1091-1096. LI Qiang,XIA Qun-li,HE Jing,et al.Maneuvering-deceleration guidance algorithm based on atmosphere estimation for reentry vehicle[J].Acta Armamentarii,2013,34(9):1091-1096.(in Chinese)
[7] 刘大卫,夏群利,崔莹莹,等.具有终端位置及角度约束的广义弹道成型制导律[J].北京理工大学学报,2011,31(12):1408-1413. LIU Da-wei,XIA Qun-li,CUI ying-ying,et al.Generalized trajectory shaping guidance law with both impact position and angle constraints[J].Transactions of Beijing Institute of Technology,2011,31(12):1408-1413.(in Chinese)
[8] Lee Y I,Ryoo C K,Kim E.Optimal guidance with constraints on impact angle and terminal acceleration[C]∥AIAA Guidance,Navigation and Control Conference and Exhibit.Austin,TX:AIAA,2003.
[9] Kim Y H.Guidance and control system design for impact angle control of guided bombs[C]∥2010 International Conference on Control,Automation and Systems.Gyeonggi-do,Korea:IEEE,2010.
[10] 王辉,林德福,祁载康,等.扩展弹道成型末制导律特性分析与应用研究[J].兵工学报,2013,34(7):801-809. WANG Hui,LIN De-fu,QI Zai-kang,et al.Analysis and application study on the extended trajectory shaping guidance law[J]. Acta Armamentarii,2013,34(7):801-809.(in Chinese)
[11] 张一航,侯明善.制导系统设计参数多准则优化决策方法研究[J].兵工学报,2014,35(1):70-75. ZHANG Yi-hang,HOU Ming-shan.Multi-criteria decision-making for guidance system design parameters[J].Acta Armamentarii,2014,35(1):70-75.(in Chinese)
[12] 宋贵宝,朱平云,李红亮.空舰导弹俯冲弹道螺旋机动制导律研究[J].兵工学报,2014,35(2):220-227. SONG Gui-bao,ZHU Ping-yun,LI Hong-liang.Research on the guidance law for spiral maneuver of air-to-ship missile in dive trajectory phase[J].Acta Armamentarii,2014,35(2):220-227.(in Chinese)
[13] 温求遒,刘大卫,夏群利,等.扩展的多约束最优制导律及其特性研究[J].兵工学报,2014,35(5):662-669. WEN Qiu-qiu,LIU Da-wei,XIA Qun-li,et al.Research on an extended optimal guidance law with multiple constraints[J].Acta Armamentarii,2014,35(5):662-669.(in Chinese)
中图分类号:TJ765.3
文献标志码:A
文章编号:1000-1093(2016)06-1131-07
DOI:10.3969/j.issn.1000-1093.2016.06.023
收稿日期:2015-11-26
作者简介:李强(1986—),男,工程师,博士。E-mail:liqiang2568837@126.com
A Terminal Multi-constraint Optimal Guidance Law for Missile
LI Qiang,LU Bao-gang,WANG Xiao-hui,WANG Yong-hai,ZHUANG Ling
(Beijing Institute of Space Long March Vehicle,Beijing 100076,China)
Abstract:A new optimal guidance law is presented to satisfy the terminal constraints for the precise strike and efficient damage to ground target.The proportional-navigation constraint,impact angle and acceleration constraints are used to achieve the terminal acceleration command convergence through the guidanceorder adjustment.The simulation results show that the optimal guidance law can meet the terminal constraints,and the command performance and the attack effect are improved as well.
Key words:control and navigation technology of aerocraft;multiple constraints for penetrating;optimal guidance law;close-form solution;guidance characteristics