仿尺蠖机器人曲面爬行步态分析与中枢模式发生器规划
2016-07-29金英连任杰冯伟博黎建军王斌锐中国计量大学机电工程学院浙江杭州310018
金英连,任杰,冯伟博,黎建军,王斌锐(中国计量大学机电工程学院,浙江杭州310018)
仿尺蠖机器人曲面爬行步态分析与中枢模式发生器规划
金英连,任杰,冯伟博,黎建军,王斌锐
(中国计量大学机电工程学院,浙江杭州310018)
摘要:风电叶片爬壁机器人的曲面爬行步态是研究难点。为此建立了含3个T型和2个I型关节的5自由度仿尺蠖机器人机构模型;通过几何关系分析机构对球曲面的适应性,基于吸附稳定状态建立关节角度幅值与曲率半径之间的函数关系,采用余弦函数设计翻转步态轨迹;基于反馈学习方法、自适应频率Hopf振荡器和Kuramoto耦合,设计关节中枢模式发生器(CPG)单元及其网络;通过学习平面翻转步态得到CPG网络参数初值,再通过在线调节关节角度幅值规划球曲面翻转步态。通过Matlab和Adams联合仿真分析了CPG网络的稳定性;进行了实物样机测试,测试了在叶片曲面上的翻转步态。研究结果表明,利用吸附稳定所需角度幅值可将平面步态调节为曲面步态,CPG在线调节步态规划方法有效。
关键词:控制科学与技术;爬壁;叶片曲面;Hopf振荡器;步态规划;中枢模式发生器
0 引言
兆瓦级风电叶片长度可达60 m以上,且曲面复杂[1]。目前检修多使用环绕叶片的框架机构,尺寸大、成本高、灵活性较差。足式爬壁机器人综合攀爬能力和灵活性强,是叶片自动检测技术研究方向,但可见文献少。美国Michigan大学研制了仿尺蠖双足机器人RAMR,髋关节与踝关节采用耦合驱动模式[2]。中科院沈阳自动化所研制了仿尺蠖Strider真空吸附爬壁机器人,研究壁面过渡步态规划算法及欠光滑壁面吸盘足着地点的自主选择[3]。文献[4]研制了3自由度仿尺蠖机器人,分析了吸附稳定边界条件。文献[5]研制了5自由度模块化仿尺蠖W-Climbing机器人,实现了在不同壁面的攀爬步态。文献[6]仿真研究了仿尺蠖机器人爬树或管道时的螺旋步态。曲面爬壁机器人可利用复杂的柔顺机构来被动适应曲面,但适应能力有限[7]。文献[8]设计了曲面上运动学模型修正算法,并利用修正后的运动学模型进行控制,当方法计算量较大。曲面适应机构或算法会导致曲面爬行步态规划变得复杂。
中枢模式发生器(CPG)是能够在没有感觉神经元或上一级控制信号输入情况下产生节律运动的神经网络[9]。通过CPG产生含有不同相位关系的信号并映射为关节的角度,可实现步态规划[10]。CPG规划出的步态仿生性好[11],平面行走步态的CPG规划文献较多,曲面步态规划研究还较少见。CPG主要分为耦合振荡器系统模型和神经网络联结模型[12]。振荡器主要有Hopf、Rayleigh、Matsuoka、Kimura等。Hopf振荡器是较为常用的非线性振荡器,存在圆形极限环吸引子。Righetti等[13]提出了一种自适应频率Hopf振荡器模型,将频率作为状态变量,采用相关性学习调整振荡器的固有频率与输入信号频率相同。利用自适应频率Hopf振荡器构成的CPG单元,将学习过程嵌入振荡器网络中,不需要外在优化算法,能够学习任意给定的信号[14]。步态转换可通过改变Hopf振荡器的频率、幅值或振荡器之间的耦合权重实现。CPG生成信号之间的相位关系是运动协调的关键[15]。北京航空航天大学采用摆动相和支撑相可调的Hopf振荡器,研究振荡器输出信号相位差的连续调节,实现了平面上不同步态间的平稳过渡[16]。为实现平面步态到曲面步态的转换,常见的方法是引入外部力反馈,但引入力反馈的算法比较复杂[17]。本文研究基于自适应频率Hopf振荡器的CPG单元及其步态规划网络,通过学习平面步态和根据曲面吸附稳定性调节关节角度幅值,规划出适应曲面的步态。
本文首先建立了5自由度仿尺蠖机器人机构模型;而后分析了球曲面吸附稳定性及其步态角度阈值;然后,基于Hopf振荡器建立CPG单元及其网络,设计耦合方法;搭建Adams和Matlab联合仿真平台,开展步态规划仿真和分析实验结果;最后,在研制的实物样机上进行测试,归纳出结论。
1 双足爬壁机器人机构及步态
本文参考W-Climbing机器人,设计了可在风电叶片上爬行的5自由度双足爬壁机器人,如图1所示。爬壁机器人采用5自由度(5旋转关节)对称机构。J1(JOINT_I1)和J5(JOINT_I2)关节轴线和连杆轴线重合,转动范围-2π~2πrad. J2(JOINT_T1)、J3(JOINT_T2)和J4(JOINT_T3)节轴线和连杆轴线垂直,转动范围为π/2~3π/2 rad. S1、S2是两个吸盘足,每个吸盘足由3个小吸盘均布构成(见图1(a))。3个吸盘与足底盘之间通过柔性铰链连接。
吸附方法主要有负压吸附、磁吸附、真空吸附、仿壁虎刚毛吸附等[18]。真空吸附技术已在工业上广泛应用,具有成熟的工业产品,但对吸附表面的清洁度有较高要求。为降低叶片表面沙尘对真空吸附稳定性的影响,可在吸附前先利用吸盘的气路和高压气源对叶片表面进行吹风清洁。
机器人可实现3种步态:蠕动步态、翻转步态和旋转步态,本文重点研究翻转步态。如图2所示,图中加粗部分处于运动状态。一个完整的翻转步态爬行过程为:

图1 5自由度爬壁机器人机构模型Fig.1 Mechanism of climbing robot with 5 degrees of freedom

图2 翻转步态示意图Fig.2 Flip gaits
1)初始状态,机器人双足S1、S2吸附壁面;
2)S2保持吸附,S1释放,J4顺时针运动,机器人翻转至S2上方位置;
3)J2、J3、J4转动调整S1运动至壁面,S1吸附壁面;
4)S1保持吸附,S2释放,J2顺时针运动,机器人翻转至S1上方位置;
5)J2、J3、J4转动调整S2运动至壁面,吸附壁面,机器人完成一个完整步态周期。
运动过程中机器人机构始终保持在同一平面。
2 曲面步态分析与CPG步态规划
2.1适应曲面的典型运动步态分析
根据风电叶片特点,本文重点研究凸曲面的爬行运动。为研究方便,以球曲面为对象。球曲面爬行中关节角度需要满足一定的几何关系约束,运动时关节角度呈现周期性变化[19]。分析机器人在球曲面上稳定吸附时的几何关系,如图3所示。
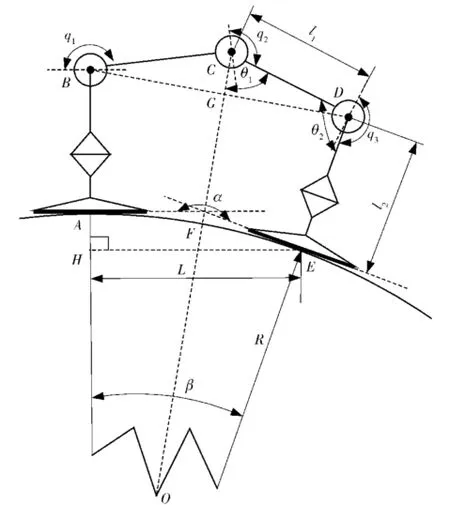
图3 机器人在球曲面上稳定吸附状态Fig.3 Stable absorption state of robot on the sphere surface
图3中,q1、q2、q3分别是机器人3个T关节旋转角度,l1、l2是机器人连杆长度(l1≈l2,且应大于等于吸盘足直径的2倍),O是球心,α是两个吸盘足与球面的切平面之间的夹角,L是爬行步长,R为球面的半径。当l1≪R时,吸盘足与空间曲面的吸附可简化为点接触。
由机构的对称性和几何关系可得

根据l1sinθ1=(R+l2)sin(π-θ1-θ2)得

分析(5)式可得,当固定θ1时,R随θ2增大而增大;当固定θ2时,R随θ1增大而增大。对于给定的R值,有多组(θ1,θ2)相对应(可实现稳定吸附)。但不同的(θ1,θ2)对应不同的步长。根据J3关节运动范围(即θ1的取值范围),平面上机器人步长范围.曲面运动时,β取值范围为

将(6)式代入(4)式可求得曲面上爬行时机器人的步长范围。曲面上的步长范围小于平面上的步长范围。
由(6)式可知,当l1≪R时,曲率R的变化对β的影响变小,即曲率变化对稳定吸附步态关节角度的干扰减小。真空吸盘材质本身的柔性可适应小范围的空间曲面曲率变化,所以本方法适合于l1≪R情况下小范围变曲率空间曲面。
当步长L和曲率半径 R给定时,由(3)式 ~(5)式联立可得θ1、θ2.将θ1、θ2代入(1)式、(2)式可得满足稳定吸附条件(见图2(c))的角度幅值(i=1,2,3).
本文采用余弦函数设计机器人关节角度曲线期望值,即CPG需要学习到并规划出的轨迹

式中:Ti是步态周期;qai是初始位姿时(见图2(a))的关节角度。
2.2翻转步态的CPG规划
受周期性干扰p的自适应频率Hopf振荡器微分方程组为

每个振荡器能学习输入信号的一个频率分量。本文利用多个自适应频率Hopf振荡器并联耦合组成CPG单元,并通过将p设置为期望角度与振荡器输出角度之间的误差,引入反馈环控制步态学习过程,多个振荡器可学习到输入信号的多个频率分量,从而规划出期望步态。因此,通过多个耦合的自适应频率振荡器建立的CPG单元,能够学习任意期望的周期信号,其数学模型为

式中:τ是振荡器间耦合强度;η是幅值学习率;αi是幅值系数;φi,1是振荡器i与振荡器1之间的相位差;Ri,1是振荡器i与振荡器1之间的相位关系;N 为CPG单元包含的振荡器个数,本文设计为N=3.
由于翻转运动主要由3个T型关节运动产生,本文设计由3个CPG单元进一步耦合组成CPG网络,输出3个关节角度轨迹,如图4所示。

图4 翻转步态的CPG网络结构Fig.4 CPG network for flip gait planning
每个CPG单元由3个振荡器组成,对应机器人一个T关节。CPG单元之间采用链式耦合,即相邻CPG单元的振荡器1之间采用 Kuramoto方式耦合[20]。例如,CPG单元2的振荡器1和CPG单元1的振荡器1之间的相位差满足:

式中:φ2-1是CPG单元2的振荡器1的相位。
CPG网络首先要学习平面爬行步态,而后再通过调节与关节角度幅值相对应的参数αi来适应曲面。
3 仿真研究与样机测试
3.1仿真验证
本节进行步态仿真验证CPG生成的翻转步态,利用Adams建立机器人虚拟样机及其运动学模型,利用 Matlab搭建翻转步态 CPG规划网络,Adams/Controls提供了Adams与Matlab的接口。
机构参数l1=0.32 m,l2=0.29 m.根据(4)式和(6)式,机器人在平面上爬行时步长范围是0.430 m≤L≤0.608 m.根据兆瓦级风电叶片翼型参数,设球曲面半径R=2 m,根据(4)式和(6)式,可得步长范围是0.382 m≤L≤0.538 m.因此,选取爬行步长 L=0.484 m,联立(1)式 ~(6)式可得图2(c)稳定吸附下的角度幅值(i=1,2,3).平面上,==1.842 rad,=2.598 rad;曲面上,==2.475 rad,=1.823 rad.带入(7)式可得期望步态,设置步态周期Ti=8 s.
将机器人以翻转步态在平面上爬行作为学习步态输入到CPG网络中,各关节角度(相对于初始位姿qi-)曲线如图5所示。

图5 CPG网络学习到的平面爬行T关节角度曲线Fig.5 Climbing angle of T joint during CPG network learning
CPG网络经过110 s的学习,3个关节角度曲线相位差收敛为0.
如图6所示,JOINT_T1关节对应的CPG单元经过110 s的学习,输出的角度与期望角度相同,构成该CPG单元3个振荡器的频率、幅值、相位均达收敛。
将曲面稳定爬行步态角度幅值代入(7)式可得曲面爬行期望步态,作为p*输入CPG网络,并以平面爬行学习后的CPG网络参数为初始值,CPG网络生成球曲面翻转步态时各T关节的角度曲线如图7所示。
如图5和图7所示,球曲面上JOINT_T1关节角度幅值大于平面上幅值,JOINT_T2关节角度幅值小于平面上幅值。通过CPG网络学习平面翻转爬行步态,然后在线调节CPG参数,改变关节角度幅值,机器人能够将平面爬行步态转换为曲面爬行步态,从而使机器人具有适应曲面爬行的能力。CPG的参数将在学习的过程中自动调节,不需要外部优化算法。
3.2样机测试
机器人控制系统由PC机、伺服驱动器、吸盘足控制器、摇杆等组成。关节电机选用瑞士Maxon公司的 EC60flat盘式电机。吸盘足控制器采用STM32F103RBT6为主控芯片,主要包括电源模块、通信模块、以及气压传感器、超声波传感器、真空泵和电磁阀组成的吸附模块。采用VC++编程实现CPG规划算法。测试表明机器人可在叶片曲面上以翻转步态稳定爬行,过程如图8所示。
4 结论
本文分析了仿尺蠖机器人机构的曲面适应性,基于自适应频率Hopf振荡器设计了CPG网络,规划出球曲面翻转步态。联合仿真和样机测试表明:
1)足式爬行机器人曲面适应性问题可转换为曲面吸附稳定性分析,根据稳定性要求,调节平面爬行时的角度幅值来规划曲面爬行步态。
2)通过将步态误差作为干扰反馈给CPG单元,CPG单元可学习到期望角度信号的形状和相位关系,并将期望步态编码到结构稳定的动态系统极限环中。
3)学习过平面步态后的CPG网络,可在线调节生成球曲面步态,实现机器人球曲面稳定爬行。
本文研究为机器人在曲面上运动提供了基础。研究是在假设已知曲率信息情况下进行,实际应用中曲率信息一般未知,下一步可研究利用触力来感知曲率变化信息,由平面到曲面的转换步态也是进一步研究方向。
参考文献(References)
[1] 胡燕平,戴巨川,刘德顺.大型风力机叶片研究现状与发展趋势[J].机械工程学报,2013,49(20):140-151. HU Yan-ping,DAI Ju-chuan,LIU De-shun.Research status and development trend on large scale wind turbine blades[J].Journal of Mechanical Engineering,2013,49(20):140-151.(in Chinese)
[2] Tummala R L,Mukherjee R,Xi N,et al.Climbing the walls [J].Robotics&Automation Magazine,2002,9(4):10-19.
[3] 姜勇,王洪光,房立金.基于主动试探的微小型爬壁机器人步态控制[J].机械工程学报,2009,45(7):56-62. JIANG Yong,WANG Hong-guang,FANG Li-jin.Gait control of micro wall-climbing robot based on initiative exploration[J].Journal of Mechanical Engineering,2009,45(7):56-62.(in Chi-nese)
[4] 王斌锐,冯伟博,骆浩华,等.曲面上双足三自由度爬壁机器人设计与稳定性分析[J].机器人,2014,36(3):349-354. WANG Bin-rui,FENG Wei-bo,LUO Hao-hua,et al.Design and stability analysis of dual-foot 3 DOF climbing robot for blade surface[J].Robot,2014,36(3):349-354.(in Chinese)
[5] Guan Y,Zhu H,Wu W,et al.A Bio-inspired modular biped wall-climbing robot with superior mobility and function[J].IEEE/ ASME Transactions on Mechatronics,2013,18(6):1787-1798.
[6] Yao J J,Gao S,Jiang G L.Screw theory based motion analysis for an inchworm-like climbing robot[J].Bobotica,2015,33(8):1704-1717.
[7] Leon-Rodriguez H.Surface adaption robot for defect detection by performing continuously an ultrasound wheel probe[C]∥16th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Maohines.Sydney,Australia:U-niversity of Technology Sydney,2012:367-374.
[8] Mahmoud T,Pedro L,Lucio S,et al.Motion control of an omnidirectional climbing robot based on dead reckoning[J].Mechatronics,2015,30:94-106.

图6 JOINT_T1关节角度CPG学习效果Fig.6 Results of angle of JOINT_T1 during CPG unit learning

图7 CPG网络在线调节得到的曲面上爬行T关节角度曲线Fig.7 Spherical climbing angle of T joint during online adjustment planning of CPG network
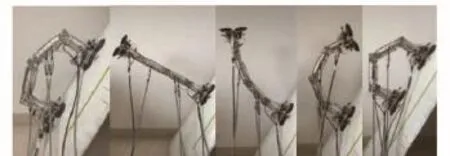
图8 机器人在风电叶片上翻转爬行步态实验Fig.8 Flip gaits of robot climbing on the wind turbine blade
[9] Ijspeert A J.Central pattern generators for locomotion control in animals and robots:a review[J].Neural Networks,2008,21(4):642-653.
[10] Wu X,Ma S.Adaptive creeping locomotion of a CPG-controlled snake-like robot to environment change[J].Autonomous Robots,2010,28(3):283-294.
[11] Ajallooeian M,Ahmadabadi M N,Araabi B N,et al.Design,implementation and analysis of an alternation-basedcentral pattern generator for multidimensional trajectory generation[J]. Robotics and Autonomous Systems,2012,60(2):182-198.
[12] Arena E,Arena P,Patané L.CPG-based locomotion generation in a Drosophila inspired legged robot[C]∥4th IEEE RAS& EMBS International Conference on Biomedical Robotics and Biomechatronics.Rome,Italy:IEEE,2012:1341-1346.
[13] Righetti L,Buchli J,Ijspeert A J.Dynamic Hebbian learning in adaptive frequency oscillators[J].Physica D:Nonlinear Phenomena,2006,216(2):269-281.
[14] Righetti L,Buchli J,Ijspeert A J.From dynamic Hebbian learning for oscillators to adaptive central pattern generators[C]∥3rd International Symposium on Adaptive Motion in Animals and Machines.Ilmenau,Germany:ISLE,2005:1-7.
[15] Petriˇc T,Gams A,Ijspeert A J,et al.On-line frequency adaptation and movement imitation for rhythmic robotic tasks[J].The International Journal of Robotics Research,2011,30(14):1775-1788.
[16] Wu X,Teng L,Chen W,et al.CPGs with continuous adjustment of phase difference for ocomotion control[J].International Journal of Advanced Robotic Systems,2013,10:1-13.
[17] Fukuoka Y,Kimura H,Cohen A H.Adaptive dynamic walking of a quadruped robot on irregular terrain based on biological concepts[J].The International Journal of Robotics Research,2003,22(3/4):187-202.
[18] Chu B,Jung K,Han C S,et al.A survey of climbing robots:locomotion and adhesion[J].International Journal of Precision Engineering and Manufacturing,2010,11(4):633-647.
[19] Tavakoli M,Marques L,de Almeida A T.OmniClimber:an omnidirectional light weight climbing robot with flexibility to adapt to non-flat surfaces[C]∥2012 IEEE/RSJ International Conference on Intelligent Robots and Systems.Vilamoura,Portuguesa:IEEE,2012:280-285.
[20] Acebr N J A,Bnoilia L L,Vicente C J P,et al.The Kuramoto model:a simple paradigm for synchronization phenomena[J]. Reviews of Modern Physics,2005,77(1):137-185.
中图分类号:TP242.3
文献标志码:A
文章编号:1000-1093(2016)06-1104-07
DOI:10.3969/j.issn.1000-1093.2016.06.019
收稿日期:2015-11-16
基金项目:国家自然科学基金项目(51575503);浙江省自然科学基金项目(LY14F030021)
作者简介:金英连(1975—),女,副教授,硕士。E-mail:jinyinglian@cjlu.edu.cn;王斌锐(1978—),男,教授,博士。E-mail:wangbinrui@cjlu.edu.cn
Gait Analysis of an Inchworm-like Robot Climbing on Curved Surface and CPG-based Planning
JIN Ying-lian,REN Jie,FENG Wei-bo,LI Jian-jun,WANG Bin-rui
(College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou 310018,Zhejiang,China)
Abstract:The curved surface climbing gait is the key of wall-climbing robots for detecting the wind turbine blades.A mechanical model of an inchworm-like climbing robot with 5 DOF is designed,including three T type joints and two I type joints.The adaptability of the vacuum sucker and mechanical model to the arc surface is analyzed based on geometric method.The fliping gaits on curved surface are analyzed by the circular trajectory planning method.The function relationship between the joint angle and curvature radius is established based on the stable adsorption state.Based on the supervised learning method,the adaptive frequency Hopf oscillator and Kuramoto couple,a central pattern generator(CPG)module corresponding to a joint and a CPG network of robot are designed.The steady-state values of the parameters which are learned from the flat flip gait can be the initial values of the parameters of CPG network,and then the flip gait on curved surface is planned by adjusting the angle amplitudes online.The coordinated simulation of the curved surface flip gait based on Matlab and Adams is carried out,which validates the stability of the proposed CPG network.The physical prototype robot is developed,and the flip gait ex-periments on curved surface are carried out.The results show that the angle amplitude gained from the stable adsorbing status can be used to transfer the plane gait to curved surface gait,and the online adjustment CPG planning is valid.
Key words:control science and technology;wall-climbing;blades curved surface;Hopf oscillator;gait planning;central pattern generator
