汽车前照灯单侧灯光自动感应调节控制装置
2016-07-26章奕航王晓燕方雅秀
章奕航,王晓燕,方雅秀
(浙江师范大学工学院,浙江 金华 321004)
汽车前照灯单侧灯光自动感应调节控制装置
章奕航,王晓燕,方雅秀
(浙江师范大学工学院,浙江 金华 321004)
制作了一款采用可编程主控芯片AT89S52型单片机为电子控制单元核心的汽车前照灯单侧灯光自动感应调节装置,文章详细介绍了该装置的工作原理及硬件组成,重点对光线传感器、距离传感器、角度传感器、电机驱动模块及执行模块进行了研究设计,并采用 Pascal语言编程,主程序展示其控制装置的逻辑控制关系。模拟装置实验结果表明,各项数据均在误差范围内,符合设计要求。
前照灯;单片机;传感器;光强度
10.16638/j.cnki.1671-7988.2016.06.036
CLC NO.: U463.65 Document Code: A Article ID: 1671-7988 (2016)06-103-04
引言
前照灯是保障汽车安全行使的重要部件,其照射距离越远、配光特性越合理,汽车驾驶安全性就越高。而照明问题往往又是造车夜间交通事故的主要原因,特别是在汽车近距离交会时,当无法避免远光灯照射时,其灯光将会引起驾驶员炫目。据不完全统计,我国每年平均发生约11万起汽车事故,其中约有24%系由强光刺眼导致会车前后发生的交通事故[1,2]。
目前,国内外对前照灯防炫目研究主要有采用自动变光防止炫目、采用单色光防炫目、采用液晶变光装置防止炫目和采用偏振光防炫目等[3-5]。本文设计的单侧灯光自动感应装置能实现在会车时自动调节单侧车灯灯光强度,微调灯光照射范围,在保证正前方照明距离的前提下,使灯光强度控制在不刺眼的范围内,可有效降低会车时交通事故的发生。
1、自动感应调节装置介绍
自动感应装置分为两个模块,一部分为感应与计算模块,由距离传感器、光线传感器和单片机等组成,单片机在获得车距、光线亮度等数据后进行分析计算,获得任一时刻的车距,根据该车距计算出最佳光线亮度,并将这一信号传输给执行模块;另一部分为执行模块,该模块是基于555定时器制作的电压控制模块,在获得计算模块的控制信号后,由电压控制模块控制前照灯电路中的电压,进而实现单侧前照灯中的电流大小的改变,达到调节灯光亮度的目的。自动感应装置控制原理如图1所示。
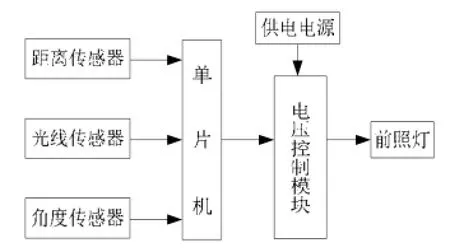
图1 自动感应装置控制原理框图
2、硬件设计
2.1光线传感器
本装置所使用的光线感应器是Risym四线制光敏电阻传感器模块,主要负责对单侧灯光光线强度的检测和信号传输,运算并判断是否运行自动调节控制程序,实时反馈检测数据,其工作电路如图2所示。在VCC端接入3.3-5V的电压后,光敏电阻将其光线强度信号转化为电流信号,并通过AO端输出模拟信号至计算模块。
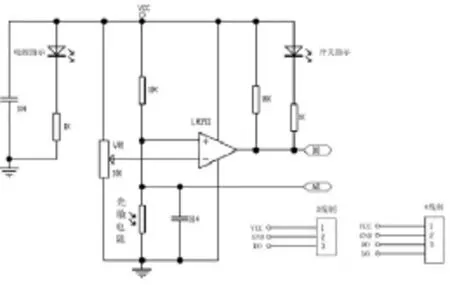
图2 四线制光线传感器工作电路图
2.2距离传感器
本装置采用的HY-SRF06超声距离传感器,该传感器是利用高频超声脉冲反射的原理用来检测物体的距离。“飞行时间法”(flying time)是通过发射特别短的并测量此声波脉冲从发射到被物体反射回来的时间,通过测时间间隔来计算与物体之间的距离。在该智能控制装置中,距离传感器负责会车车距的确认与判断,在汽车远光灯开启后,时刻出于工作状态。此仪器工作稳定,成本较低,可适合多种环境下使用。其工作原理如图3所示,在VCC端输入3.3-5V电压后,由 OUT端输出方波脉冲信号,方波脉冲信号根据其占空比大小将其转化为电信号并输出给计算模块,该传感器测量的有效距离为0~6m。

图3 HY-SRF06超声距离传感器原理图
2.3角度传感器
该装置选用Risym ADXL345数字式倾角传感器(加速度传感器)作为距离传感器探测范围监测的快速响应传感器。该传感器是一种基于单轴陀螺仪改进而来的加速度传感器,其优点在于收到环境干扰较小,体积占用极小,能保证全天候在任何环境条件下较为稳定地工作,且精度较高,响应速度快。
2.4电机驱动模块
L298N电机驱动模块是一种双H桥电机驱动芯片,其中每个H桥可以提供2A的电流,功率部分的供电电压范围是2.5-48V,逻辑部分5V供电,接受5V TTL电平。一般情况下,能收单片机控制调节电机转速与方向,工作稳定。其驱动板模块如图4所示。
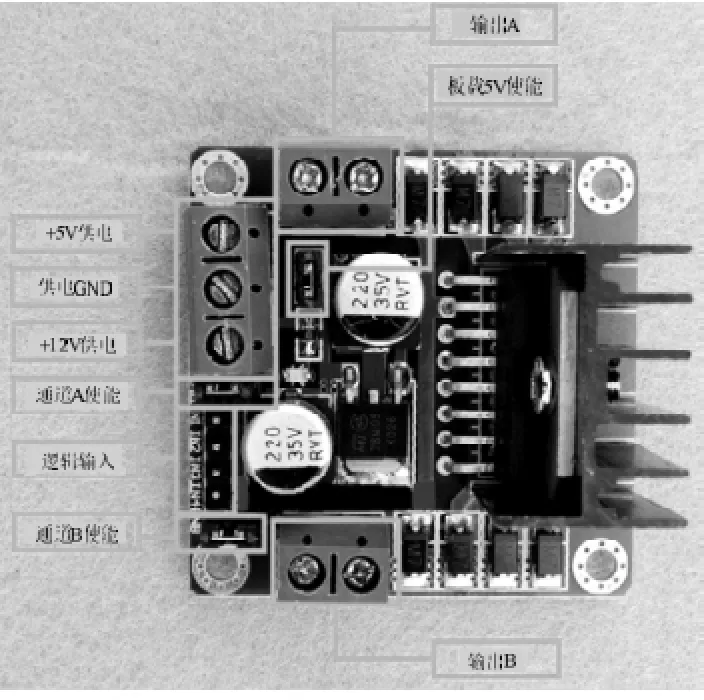
图4 L298N电机驱动板模块示意图
2.5执行模块
电机的转动由 L298N电机驱动模块驱动。通过 Pascal语言对单片机编程,控制L298N电机驱动模块控制电动机在0°(设定与汽车行驶方向一致)至90°(逆时针转动为正向,与汽车行驶方向垂直)之间快速转动。
交通法规规定,夜间距对方来车至少 150 m,处关闭远光灯开启近光灯,按照国家二级公路汽车用双向二车道的宽度范围9-11m,取车间距约为单车道款的上限值为5.5 m,假设道路为直线,根据计算可得,在会车时,车辆的直线距离最远为150.1m;当相互间距离缩短到25 m或更短时,直接眩目的作用下降[3],取x的下限值为10 m,可得相会两车的水平纵向距离范围 10m≤S≤150.1m。因此,在实际程序中,仅当车距在 10m≤S≤150.1m,此时才进入距离传感器的检测范围。由于模拟实验所用的传感器限制,在本实验中,探测范围为0≤S≤600cm,在HY-SRF06超声波距离传感器的最大量程范围内,故HY-SRF06超声波距离传感器能探测距离并返回数值。
HY-SRF06超声波距离传感器固定于直流电机输出端,由电机带动在 0°-90°之间转动(同样逆时针转动为正向)。HY-SRF06超声波距离传感器每秒主动发射8个50%占空比,频率为40KHz的高频超声脉冲,并接收返回脉冲信号,即每秒最多可得8组距离探测数据。在实际模拟情况下,无障碍物时,探测距离均为“正无穷大”或者输出“math error”(超出范围)(探测距离单位为cm);当传感器收到高平电(3-5μs)时,即障碍物进入探测范围,实际情况为汽车距离障碍物距离小于等于设定的灯光调节起始距离值时间,此时高平信号返回进入上一环节单片机,控制L298N电机驱动模块驱动直流电机仅在有脉冲信号返回值的范围内转动。电动机仅在有脉冲信号返回值的范围内转动(实现被探测物体的跟踪)。
根据亮度与照度间的关系:L=R×E,式中,L为亮度,R为反射系数(在这里近似可以只考虑空气与汽车玻璃的反光系数),E为照度;以及照度与光源的发光强度(光强 I)间的关系:E=I×D-2,式中,I为光源光强,D为实测的车距。可得,光源光强满足关系式:E=L/R;同时可得:L=R×(I×D-2)。
已有研究数据表明,人体最佳舒适光感强度为106cd/m2,所以此处光强D可以用106cd/m2代入,D车距由上述超声传感器捕获。汽车前挡风玻璃反射系数为7%~17%不等,在用LED灯贴片的模拟实验中,均使用平均值,即反射系数确定为12%,不考虑空气的反射系数。
由此可得:L=12%×(106×D-2),只需获得车距数据即可换算为此车距上人次最感舒适的前照灯灯光强度。
本实验装置中的光线传感器安装在LED灯组附近,检测即时LED灯组亮度,输出值为L2,为主程序的输入亮度值。由程序判断L2与程序4中任意车距上人体最感舒适亮度L比较,若 L2>L,则控制 555定时器降低电脉冲频率(正常为40KHz,正常工作电压5V),直至L2≤L。由于超声传感器数据接收频率为8次/秒,因此在本实验中,LED灯组能够根据实测与障碍物之间的距离(模拟来车的距离),每秒调节8次亮度,近似可认为LED灯组亮度连续且缓慢地自动调节。
当障碍物过远或者没有障碍物时,超声传感器探测距离为无穷大,此时程序控制距离传感器模块处于循环工作状态,亮度反馈数值 L2保持车灯原有的亮度值,即车灯不改变灯光强度。
3、软件设计
本系统的核心控制部件采用可编程主控芯片 AT89S52型单片机,采用Pascal语言编程[6,7]。主程序展示单侧灯光自动感应调节控制装置的骨架,体现控制系统功能逻辑关系。在本系统中,首先由超声距离传感器、光线传感器进行数据采集,并将采集信号转化为电信号输出给计算模块,由计算模块进行快速处理,根据预先设定的程序计算出控制信号,即任意时刻距离时的人体最感舒适光线强度数值(理论数值),并与光线传感器采集到的数值(实际数值)进行对比,如果计算所得的理论数值大于实际数值,计算模块则不输出任何信号;如理论数值小于实际数值,则由计算模块输出一个控制信号,输出给电压控制模块,并由电压控制模块控制单侧前照灯电路中的有效电压,从而使得单侧前照灯的光线强度下降到该时刻的人体最感舒适光线强度值。超声距离传感器、光线传感器持续不断地进行数据采集,使得以上计算流程不断循环,达到快速响应并控制单侧前照灯电路中有效电压的目的。系统主程序控制流程如图5所示。
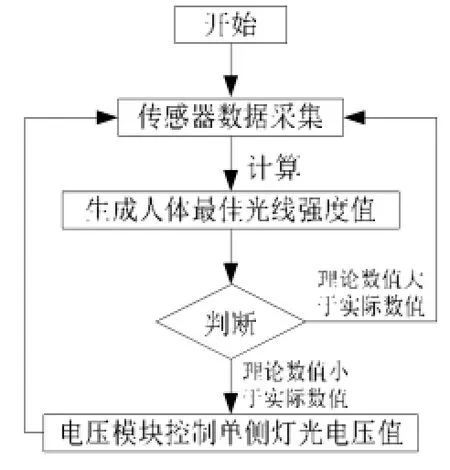
图5 主程序控制流程图
4、模拟装置实验结果
试验用的汽车单侧灯光自动感应调节控制装置是一依据汽车前照灯工作原理缩小设计的模型装置,其构成为电源、各传感器、基于单片机的微处理器、电流/电压输出模块、LED灯组,其中由5V 1A锂电池电源代替12V车载铅蓄电池;LED灯组模拟汽车前照灯的实际使用情况。
在L298N的有效控制下,低速直流电动机保持90°/s的速度往复转动,超声距离传感器车距数据获得频率稳定 25 次/秒,数据反馈无障碍。
根据会车车距数据信息,微处理器(单片机组)能精确计算出该车距下的人体最感舒适光线亮度,计算频率为50HZ,有效数据输出为25HZ,即25次/秒,输出至执行模块,信息传输无障碍。
在模拟实验条件下(模型车长约20cm,距离前方探测范围内的目标障碍物距离在6m之内),传感模块能快速自动捕获目标方向并测得误差范围内的距离值;执行模块能连续、快速地完成计算并调节电流输出。
PWM 模块能全程保持工作状态,在获得控制模块信号后,能够实现快速、精确地探测来车数据,并完成快速计算,自行改变高电平信号(5V)输出频率,调节电路有效电流,将LED灯组的亮度值在1s内调整至实际距离下人体最感舒适亮度值。实测数据显示,LED灯组亮度数值符合人体最感舒适亮度计算公式计算结果(误差±5cd,属正常误差范围,误差来源于信号传输时间延迟)。
该模拟实验装置已做出相应的灯光亮度调节控制动作,且已通过60次模拟实验测试,各组实验数据均在正常误差范围内,符合本设计要求。
5、结论
汽车前照灯单侧灯光自动感应调节装置能快速、精确地探测来车数据,并完成快速计算,做出相应的灯光亮度调节控制动作,且实验指标均在正常误差范围内,该装置经多次不同距离、方向条件下的模拟实验测试,运行正常、稳定,装置反应速度较为灵敏。
该装置可根据不同汽车的构造及行驶环境的需要,合理设置装置的探测角度范围、探测距离、电流或电压值、人体最感舒适灯光强度值,或合理更换部分适合实际条件的传感器或执行模块,即可实现全天候自动感应调节行车来车时的灯光强度,以有效缓解夜间行车由于灯光刺眼、炫目而导致交通事故频发的问题。
[1] 禚宝国.汽车前照灯炫目与两车相向运动位置的分析[J].北京汽车,2014,(3):34-36.
[2] 涂志军.汽车自适应前照灯系统的方案设计[J].汽车零部件,2011, (10):67-70.
[3] 贺平.汽车防炫目技术研究[D].汽车零部件.长沙:湖南大学,2005. [4] 房旭,姚勇.智能汽车前照灯系统(AFS)研究[J].汽车技术, 2006,(4):17-20.
[5] 方英兰,朱向冰.自适应前照灯的功能及实现[J].灯与照明, 2010,34 (2):14-18.
[6] 肖晓霞,罗铁青,彭莹莹.C语言程序设计[M].北京:人民邮电出版社,2014.
[7] 谭浩强.C语言程序设计[M].北京:清华大学出版社,2010.
The Automatic Induction Adjusting Control Device of Unilateral Lights for Automobile Headlamps
Zhang Yihang, Wang Xiaoyan, Fang Yaxiu
( College of Engineering, Zhejiang Normal University, Zhejiang Jinhua 321004 )
The automatic induction adjusting control of unilateral lights for automobile headlamps controlled by programmable master control chip AT89S52 which is the core of electric control unit is made, the work principle and hardware constitute of the device are particularly described, the research and design of executive module, motor drive module, angle sensor, range sensor and light sensor is focused, it is programmed with Pascal language, the main program displays the logic control relation of the control device. The experiment result of the simulator shows that all the data are within the error range and comply with the design requirement.
headlamp; microcontrollers; sensor; luminousintensity
浙江省大学生科技创新活动计划暨新苗人才计划项目(2015R404031);浙江师范大学第十七期学生课外学术科技活动项目。
章奕航,就读于浙江师范大学。学院本科生,研究方向为汽车电子技术。通信作者:王晓燕,就职于浙江师范大学工学院,主要从事汽车电子技术和系统控制研究。