基于无线通信模块的两智能车路口交汇系统的研究与实现
2016-07-26闫宽宽凡庆张维君
闫宽宽,凡庆,张维君
(1.长安大学汽车学院,陕西 西安 710064;2.空军航空大学飞动系,吉林 长春130000)
基于无线通信模块的两智能车路口交汇系统的研究与实现
闫宽宽1,凡庆1,张维君2
(1.长安大学汽车学院,陕西 西安 710064;2.空军航空大学飞动系,吉林 长春130000)
介绍了两智能车十字路口交汇自动避让的系统设计,研究了采用apc220无线模块来实现两车信息交互的软硬件设计方法。该系统采用arduino微控制器的Uno控制板为核心控制器,利用红外模块获得路径信息从而达到小车循迹行驶的目的,同时利用码盘测速方法测得小车行驶速度。最后根据各传感器采集回来的数据利用积分算法与逻辑计算从而实现小车智能通过十字路口。
arduino;apc220;十字路口;积分算法
10.16638/j.cnki.1671-7988.2016.06.035
CLC NO.: U491.2 Document Code: A Article ID: 1671-7988 (2016)06-100-03
引言
随着社会与技术的进步,在IT技术、通信技术的推动下智能交通系统的研究对象已经从传统的人-车-路发展成为智能道路-智能车辆和所有交通参与者作为对象。在面对交通问题时,完全割裂交通系统中的各个要素已出现弊端,因此充分考虑车路信息的协调,从智能车路系统的角度探寻交通系统运行规律已成为国内外研究的热点和重点。本文介绍的智能车系统为智能交通的简单模型。首先小车红外模块探测到轨道上黑线,能够在特定区域循迹行驶。同时根据码盘测得速度计算小车距交叉路口距离,两小车信息交互确认安全后即可通过。若有碰撞可能,其中一方应停下等待从而保证两车安全通过路口。本文假设两车正面交汇时各自靠右行驶不会发生碰撞问题,所以这里不讨论这种类型的交汇。
1、智能车系统的硬件设计
如图1所示,系统主要有五部分组成:

图1
1.1单片机控制芯片
arduino板是一个以 AVR 单片机为核心的开源硬件平台,提供的核心硬件资源是一个基于 8-bit 的 AVR 单片机ATmega328 微控制器。开发板包括32个I/O接口,其中有14道数字 I/O 接口(D0-13):可作为输入或输出。其中数字端口的(D3,5,6,9,10,11)可以编程为 6个模拟 PWM 输出端口。6个模拟输入端口(A0-5):输入比如传感器电压这类模拟信号,可通过内部 ADC将其转换为数字信号。板子可以对外提供3.3V或者5V电压接口。
1.2APC220-43无线通信模块
APC220-43模块是高度集成半双工微功率无线数据传输模块,其嵌入高速单片机和高性能射频芯片ADF7020-1。创新的采用高效的循环交织纠检错编码,抗干扰性和灵敏度都大大提高,最大可以发现24bits连续突发错误,达到业内的领先水平。APC220-43模块提供了多个频道的选择,可以在线修改串口速率,发射功率,射频速率等各种参数。
APC220-43模块能够透明传输任何大小的数据,而用户无须编写复杂的设置与传输程序,同时,小体积宽电压运行,较远传输距离,丰富便捷的软件编程设置功能,使之能够应用与非常广泛的领域。图2为该模块与单片机接线图。
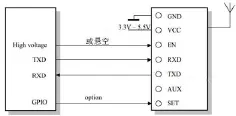
图2
1.3速度检测模块
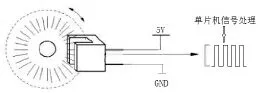
图3
该系统中使用单信号线光电测速传感器H206,其工作原理较简单如下图3,该测速装置有三根引脚电源线接5v电源信号线接单片机端口。U型管装有一对红外对射管,当装在车轮上的码盘转动时,该传感器会产生如图中方波,然后利用单片机中断函数监测到该信号中脉冲数从而可以计算得到当前车轮转速,最后根据车轮周长可以测出目前车速。
1.4红外探测模块
此模块使用亿光 5MM 红外对管,其中红外接收管PT334-6B,红外发射管IR333-A等分立元器件组成探头,在探测过程中,发射端发射的红外光被反射回来并被接受管接收到。而接受管它是一个具有光敏特征的PN结,属于光敏三极管,具有单向导电性,因此工作时需加上反向电压。无光照时,有很小的饱和反向漏电流,此时光敏管不导通。当光照时,饱和反向漏电流马上增加,形成光电流,在一定的范围内它随入射光强度的变化而增大。此对管使用LM339电压比较器获得输出信号,比较器之后加入一级迟滞电路,使输出信号更加干净,适合单片机的使用。该模块电路如图4所示。
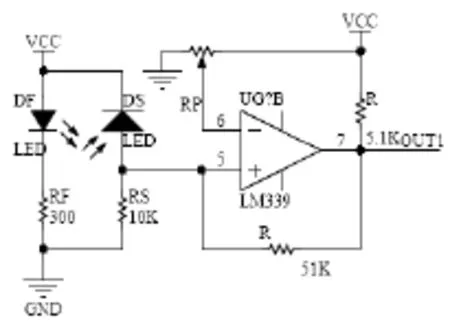
图4
1.5电机驱动模块
L298N是一款直流电机驱动芯片,可以同时驱动两个电机,允许电压范围3.6V~4.5V,内有四重推挽驱动电路,可以提供 1A的驱动电流。并且如果芯片过热,芯片能够自动关断,保障系统不受损坏。引脚A,B可用于PWM控制电机的转速。而IN1,IN2和IN3,IN4两对引脚通过改变接高低电平顺序,可实现电机正反转。
2、软件设计
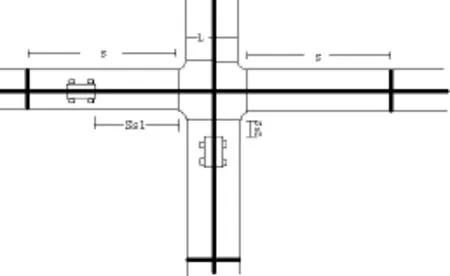
图5
如图5所示小车前部装有3对红外探测模块根据该模块检测到的信息可以判断小车当前行驶姿态,调整舵机转向从而保持小车始终沿着轨道黑线行驶即完成了智能车的循迹行驶。当三个红外探测模块同时检测到黑线时,说明小车进入十字路口区域,此后便以小车0.5s末的速度作为小车0.5s的平均行驶速度,进行计算小车在路口区域行驶的路程。当小车进入路口区域的同时通过无线模块发送信号,若另一小车收到信号时也已进入十字路口,则进行计算是否有在路口相撞的可能,若有可能相撞,则后进入小车停车避让;若无则两车保持原速度驶过十字路口。两智能车的控制系统的软件设计基于arduino1.6.1编程环境,使用C语言实现。图6为控制系统软件流程图。
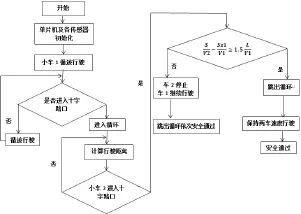
图6 控制系统软件流程
3、结束语
本文在循迹智能车的基础上提出了一种基于无线通讯技术两车智能通过十字路口的简单方案。在实际的测试中,小车能够无碰撞的通过十字路口。但是当小车速度过快时,系统处理速度慢,可能会导致小车相撞。总之当小车速度保持在一定范围内时,该系统可以完成对小车的控制,使其按着预想的模式行驶。
[1] 颜利彪,范蟠果.基于单片机的简易智能电动车[J].电子技术,2004 (4):8-10.
[2] 高月华.基于红外光电传感器的智能车自动寻迹系统设计[J].半导体光电,2009(30):135-145.
[3] 杨继志,郭敬.Arduino 的互动产品平台创新设计[J].单片机与嵌入式系统应用,2012,12(4):39-41.
[4] 安徽工程大学.一种面向路径识的远程遥控智能车:中国,201120478840.0[P].2012 -08-15.
[5] 史其信,熊辉.展望 21世纪智能交通系统的发展[J].黑龙江工程学院学报,2001,15(l):52-6.
[6] 王卓.第三届全国大学生交通科技大赛作品—城市信号控制交叉口主动安全系统设计[C],2008,12-24.
[7]吴建平,殷战国.红外反射式传感器再自主式寻迹小车导航中的应用[J].中国测试技术,2004,30(6):21-23.
Two intelligent vehicle crossing intersection based on wireless communication module research and implementation of the system
Yan Kuankuan1, Fan Qing1, Zhang Weijun2
(1.Chang'an UniversitySchool OF Automobile Shaanxi Xi'an 710064; 2.Aviation University Air ForceInstitute of aircraft and engine, Jilin Changchun130000)
a design of two smart car crossing intersection automatic collision avoidance system is introduced.apc220 wireless module is used to realize both software and hardware design method of interactive information. The system uses the arduino uno panel micro controller as the core controller, using infrared module path information so as to achieve the purpose of driving the car tracking, at the same time using encoder speed measuring method to measure the car speeds. Finally according to each sensor collected data using the integral algorithm and a certain logic control to realize intelligent car through the intersection.
arduino; apc220; the crossroads; Integral algorithm
闫宽宽,就读于长安大学。
U491.2
A
1671-7988 (2016)06-100-03