车辆半主动悬挂模型跟踪滑模控制系统仿真
2016-07-21卢权
卢 权
(中国中车唐山机车车辆有限公司,河北唐山063030)
车辆半主动悬挂模型跟踪滑模控制系统仿真
卢权
(中国中车唐山机车车辆有限公司,河北唐山063030)
摘要:针对铁路车辆横向振动稳定性控制问题,对安装有磁流变减振器的铁路车辆,设计了一种基于跟踪理论的滑模变结构控制器。运用数值仿真软件,对以天棚阻尼控制器为参考模型的模型跟踪滑模控制器系统进行数学仿真,数学仿真结果表明: 模型跟踪滑模控制器具有良好的振动控制效果。
关键词:半主动悬架天棚阻尼控制模型跟踪变结构控制
0引言
随着我国铁路的不断提速,尤其是近年来高速动车组车辆的普遍运用,车辆的横向平稳性振动控制更加显得尤为重要。
针对铁路车辆横向振动平稳性问题,本文设计了一种基于跟踪理论的滑模控制器,选用天棚阻尼控制器为参考模型,模型与被控系统的约束条件相同,因此具有理想的状态匹配。通过进行数学仿真验证,验证结果表明该控制器有效抑制了车体的横向振动。

图1 车辆模型
1半主动悬挂系统车辆模型
本文研究对象如图1所示,是以铁路车辆横向摆动为对象模型的半主动控制悬挂系统。模型主要有车体横移(x2)、转向架横移(x1)2个方向位移。
磁流变减振器采用修正Bouc-Wen模型,减振器阻尼力为Bouc-Wen滞变阻尼力与粘滞阻尼力之和,减振器阻尼力表达式[1-2]:
(1)

磁流变减振器半主动悬挂车辆系统动力学方程为:
(2)
天棚阻尼控制车辆系统动力学方程为:
(3)
其中:k1为每台转向架二系弹簧的横向刚度;k2为每台转向架一系弹簧的横向刚度;m1为转向架质量;m2为车体质量;h1为二系弹簧中心到车体重心的高度;h2为磁流变减振器到车体重心的高度;2b为二系弹簧的横向间距;xr为轨道横向不平顺;csky为天棚阻尼系数。
由式(2),得系统状态方程为:

(4)
y=Cx
(5)


2半主动悬挂模型跟踪滑模控制器
2.1模型跟踪控制的匹配条件
考虑线性控制系统[3-4]:
(6)
参考模型系统:
(7)
当系统系数矩阵满足:
rank{Bp(Am-An)}=rank(BpBm)=rank(Bn)
(8)
存在up=K1Xp+K2um+K2Kme使得方程有解。同时由于(AmBm)可控,因此存在一个矩阵Km使得(Am-BmKm)有负实部的特征根。
2.2模型跟踪滑模控制器设计
当半主动悬挂系统和天棚阻尼系统的系数矩阵满足式(8)条件时,可以求解得出up从而使得跟踪问题有解。将方程(2)及方程(3)的状态方程系数矩阵代入跟踪条件(8)中,求得半主动悬挂系统和天棚阻尼系统的系数矩阵满足跟踪条件(8)。故半主动悬挂系统和天棚阻尼满足模型跟踪匹配条件。
在控制模型和参考模型满足模型跟踪匹配条件下,假设[5-7]:
切换函数S=Gy
将半主动悬挂系统和天棚阻尼系统状态方程系数矩阵代入方程:
得误差的状态方程:
将半主动悬挂系统和天棚阻尼系统状态方程系数矩阵代入误差的模态方程:
得到误差的滑动模态方程为:
经验证各系数矩阵均满足滑动模态关于干扰的不变性及匹配性。因此跟踪条件(8)下的误差滑动模态方程可简化为:
用极点配置法可求得滑模面系数矩阵G,即可求得切换面S=Gy。
=-ks-εsign(s)
解得:
Fd=(GBp)-1{G[Ame+(Am-Ap)Xp+Bmu(t)]+ks+εsign(s)}
通过调整式中的参数k和ε,将式中ε变小即可以减小惯性作用从而削弱系统抖振,但当系统趋近模态(s≠0)动态品质时,数值可能变大,这时可以通过增大式中k值来保证状态快速到达切换面。
3半主动模型跟踪滑模控制系统仿真
仿真选用MATLAB/SIMULINK软件,对以天棚阻尼控制系统为参考的跟踪滑模控制器进行数值仿真,仿真参数如下[8-9]:
m1=30 kg,k2=230 kN/m,m2=30.2 kg
k1=18.0 kN,b=0.2 m,h1=0.196
h2=0.2 m,csky=200 N·s/m
取轨道方向不平顺激励为正弦扫频信号,振幅为3 mm。
以天棚控制作为参考模型的滑模变结构控制器的仿真模块图如图2所示[10]。
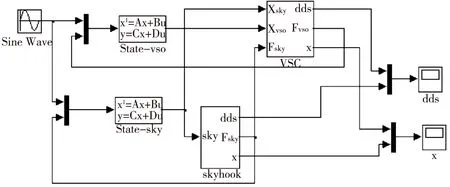
图2 以天棚阻尼控制为参考模型的滑模跟踪控制系统仿真图

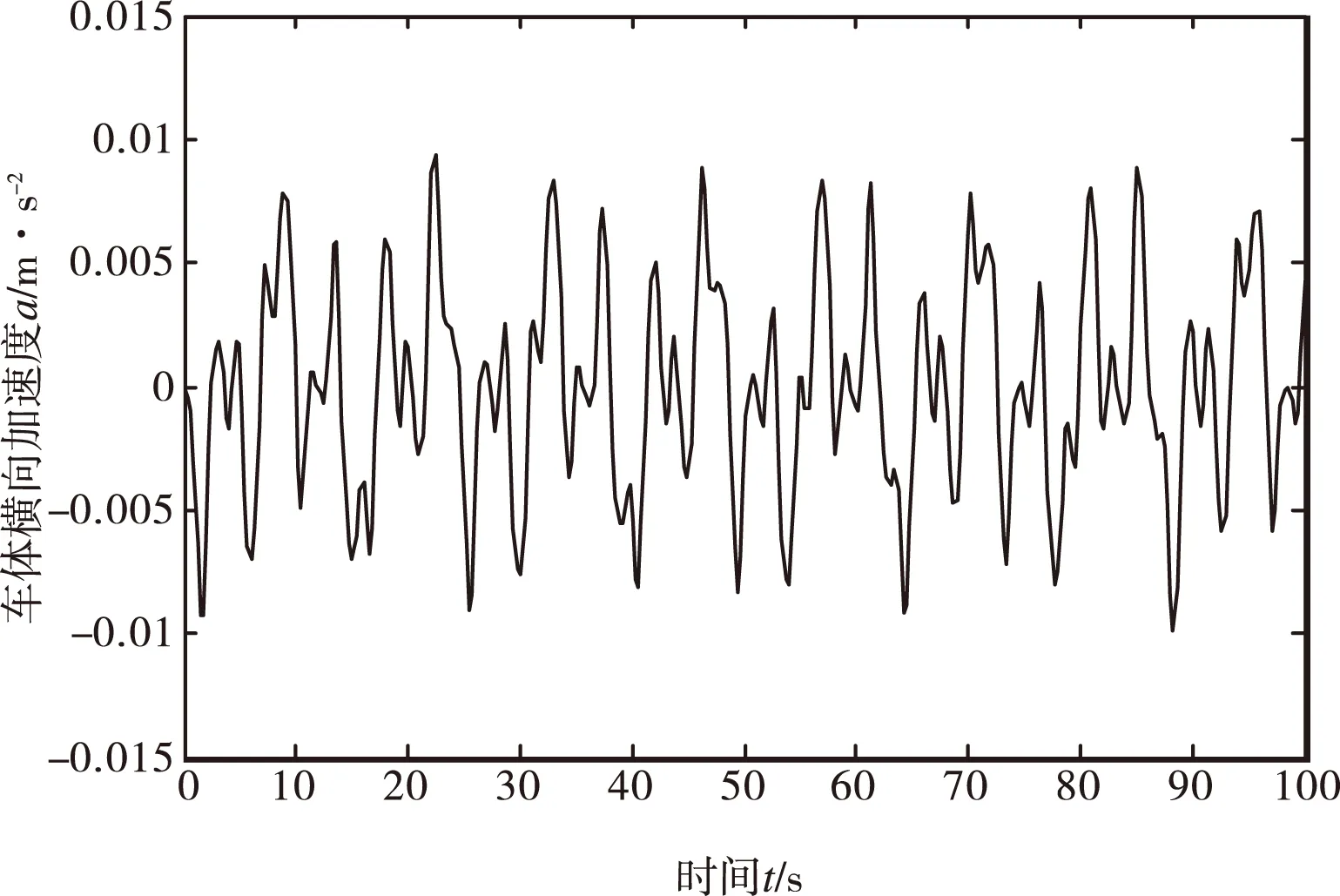
图4 模型跟踪滑模控制时车体横向加速度值
由图3、图4的仿真结果我们可以得出:由于对误差进行了控制,被控模型能够有效地跟踪参考模型,使得两模型之间的误差始终保持在一个比较小的范围内,因此可以得出控制是有效的。
4结论
对带有磁流变减振器的铁路车辆横向半主动悬挂系统设计了一个跟踪天棚阻尼器的滑模变结构跟踪控制器,通过仿真得出模型跟踪滑模变结构控制器具有较高的鲁棒性,对车辆具有良好的振动控制效果。
参考文献
[1]高国生,杨绍普,等. 基于磁流变阻尼器的机车横向悬挂半主动控制研究[J]. 功能材料,2006(37)802-804.
[2]倪建华,张智谦,张可,等.一种新型的磁流变阻尼器及其在半主动控制车辆悬架中的应用[J].机械科学与技术,2004,23(1):4-6.
[3]高为炳.变结构控制理论与应用[M].北京:中国科学出版社,1990.
[4]黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2001.
[5]赵成,胡增荣,陈大跃.半主动悬架的滑模变结构控制[J].中国公路学报,2007,20(3):109-114.
[6]赵成,陈大跃.电流变智能半主动悬架的输出反馈变结构控制[J].农业机械学报,2007,38(8):5-10.
[7]王亮,任传波,赵真,孙林. 车辆主动悬架的模型跟踪变结构控制研究[J].山东理工大学学报,2009,23(2):19-23.
[8]杨金霞,陈宁,姚嘉伶,蔡伟义. 车辆非线性半主动悬架的模型跟踪变结构控制[J].南京林业大学学报,2007(1)42-46.
[9]郑玲,邓兆祥,李以农.汽车半主动悬架的滑模变结构控制[J].振动工程学报,2003,04(2):457-462.
[10]胡跃明.变结构控制理论与应用[M].北京:科学出版社,2003.
中图分类号:U463.33
文献标识码:A
文章编号:1002-6886(2016)03-0021-04
作者简介:卢权(1983-),男,江西高安人,硕士研究生,工程师,研究方向:车辆系统动力学。
收稿日期:2015-10-26
Simulation of the model-following slip form control system for semiactive suspension in vehicles
LU Quan
Abstract:In order to solve the problem of lateral stability control of railway vehicles, we designed a model-following-based slip form variable structure controller for the railway vehicle with magnetorheological damper. Using MATLAB/SIMULINK software, we carried out mathematical simulation of the model-following slip form controller with the ceiling damping controller as reference model. The results showed that the model-following slip form controller had good control effect.
Keywords:semiactive suspension; ceiling damping control; model-following variable structure control