基于dSPACE快速控制原型的驱动电机控制研究*
2016-07-21王建强甯油江
王建强,赵 津,甯油江
(贵州大学机械工程学院,贵州贵阳550025)
基于dSPACE快速控制原型的驱动电机控制研究*
王建强,赵津,甯油江
(贵州大学机械工程学院,贵州贵阳550025)
摘要:快速控制原型作为半实物仿真技术的一种,其应用使得控制系统的开发、产品型控制器的仿真测试变得更加方便易行,也使得研究人员对控制算法及仿真测试方案的研究更加高效。利用基于dSPACE的快速控制原型建立了实时半实物仿真平台,实现了电动车驱动电机控制试验。试验结果表明,该控制系统能够实现电动车驱动电机的控制,电机能够很好的跟踪控制器输入的期望转速,控制效果良好。
关键词:驱动电机dSPACEDS1401ControlDesk
0引言
汽车电动化、智能化是当今汽车技术发展的必然趋势[1]。电机作为电动车的驱动核心,其控制是电动车开发最为关键的技术之一。无刷直流电机(BLDCM)凭借其优越的调速性能(易控制、宽调速范围、大启动转矩、高效率等)成为了电动车驱动电机的首选[2]。但是无刷直流电机作为一个具有高阶非线性、时变和强耦合等特性的系统,在仿真系统中要建立精确的数学模型比较困难[3-4]。在电机建模仿真过程中,在各种假设条件下建立简化的数学模型,不够精确的电机模型在电机传动中会使误差放大,导致控制精度进一步下降,给实际工程应用带来不便。传统的电机控制算法开发都是基于各种单片机[5-6]或者现场可编程门阵列(FPGA)[7]等工具,不仅需要大量的程序编写,使得控制器的开发效率极度降低,而且需要进行电路开发及驱动检测设计,大大增加了开发周期。再者,先进的控制算法由于其逻辑比较复杂,也无法在传统单片机等硬件条件下进行验证,加之电机自身建模简化带来的误差,要精确验证智能算法更加困难[8]。
在工程应用中,一要尽量避开系统复杂的数学模型,二要避免不断修改程序等重复性工作。而半实物仿真系统恰好就可以解决这一系列的问题。半实物仿真分为快速控制原型(RCP)和硬件在环(HIL)两种。快速控制原型是指虚拟控制器和实际的控制对象结合进行仿真,在电动车电机控制开发过程中,此种方法可以大大提高开发效率,缩短开发周期[9-10]。dSPACE实时仿真系统是一套基于Matlab/Simulink的控制系统开发与测试工作平台,可与Matlab/Simulink无缝连接,并且其允许反复修改模型设计,进行离线实时仿真,在汽车开发中得到了大量应用。本文基于dSPACE快速控制原型进行了电动车驱动电机的控制,取得了良好的实验结果。
1实验平台
快速控制原型实验中,所需的dSPACE软件由RTI(Real Time Interface,离线工具与实时工具的接口)和ControlDesk(测试和实验软件工具)两大部分组成。首先在Matlab/Simulink中建立好控制模型,RTI连接dSPACE和Matlab/Simulink,再通过RTW扩展,把Simulink的控制模型自动下载至硬件中。模型下载至AutoBox后,在软件ControlDesk中建立工程,虽然模型建立还是在Matlab/Simulink中进行,但是通过RTI实现然后下载至实时仿真硬件后,ControlDesk所建立工程便可以对硬件实时状态进行图形化管理、用户虚拟仪表的建立、变量(参数)的可视化管理、试验过程自动化等功能。
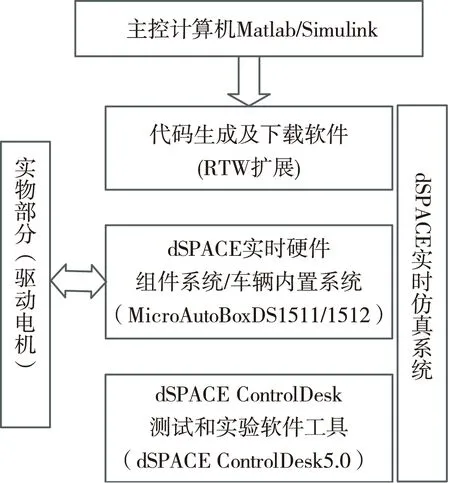
图1 基于dSPACE的半实物仿真平台原理框图
dSPACE硬件根据不同需求为单板系统和标准组件系统。本文使用的标准组件系统MicroAutoBoxII拥有全面的I/O资源,包括CAN, LIN, K/L line, FlexRay,Ethernet、旁路接口以及可编程FPGA 板卡的变体版本[10]。基于dSPACE的快速控制原型半实物仿真平台原理框图如图1所示。
2驱动电机半实物仿真实验设计
2.1电机控制结构框图
dSPACE快速控制原型作为半实物仿真系统的一种,能给电机控制系统的开发中提供高效的硬件系统和足够的软件资源。在无刷直流电机控制系统建立的初级阶段,PC机作为控制模型建立平台和人机交互平台,可以用于在线控制模型设计、下载以及仿真实验,甚至进一步的代码生成(dSPACE targetlink功能,本文未用到)。借助dSPACE软件RTI及ControlDesk的功能,可以快速建立无刷直流电机的控制系统快速控制原型模型,并对整个系统进行多次离线及在线实时试验,来验证控制算法模型及所选取软、硬件的可行性。如图2所示的半实物仿真电机控制结构框图,物理设备以实物形式出现在闭环里, 由电机、电机驱动板、变速机构等组成,省去了复杂的建模过程。
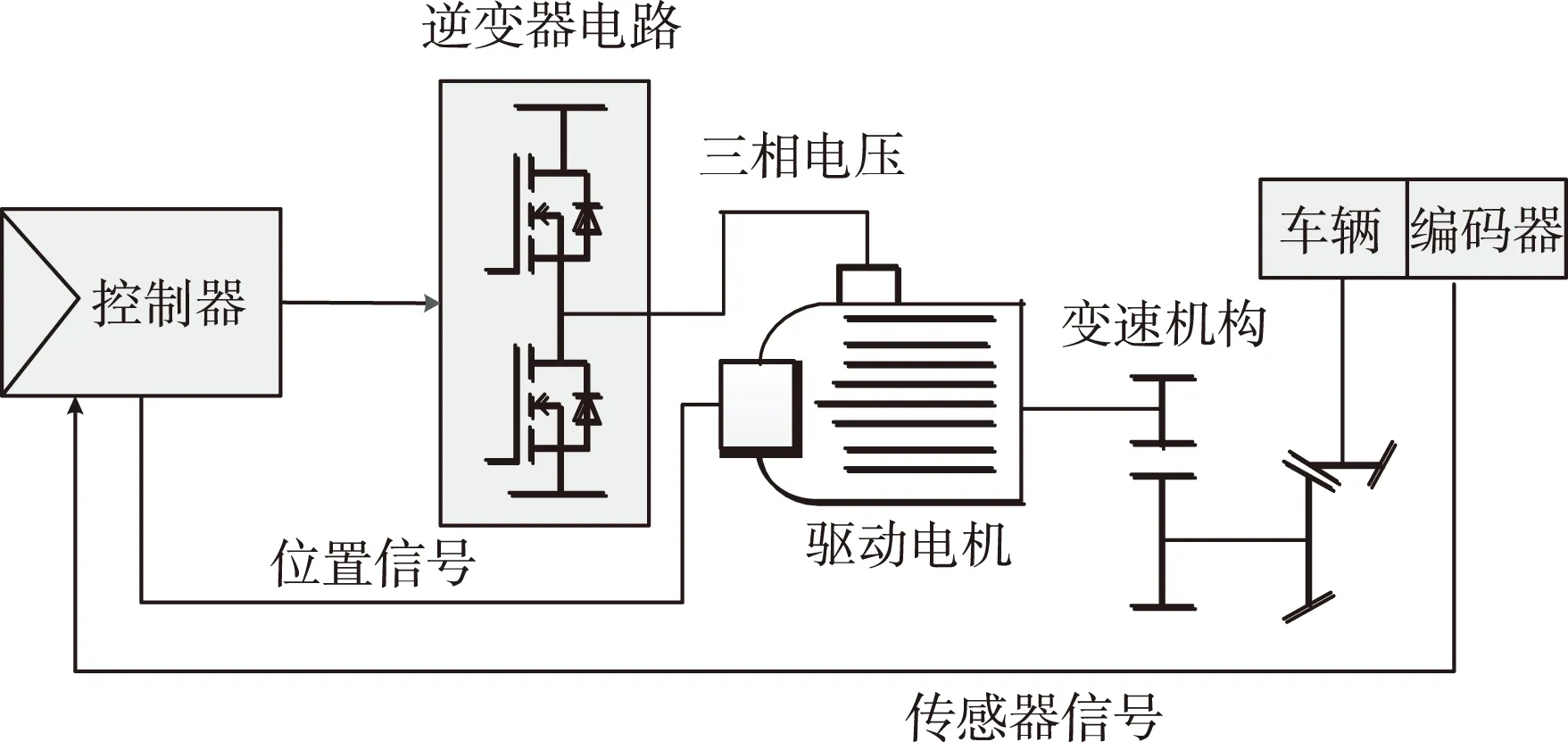
图2 半实物仿真结构框图
2.2快速控制原型系统设计
基于dSPACE对电动车的无刷直流驱动电机设计了快速控制原型控制系统,定义了各功能模块,分别是信号采集模块、转速测量模块、换向、使能模块以及速度控制模块等,并通过dSPACE/RTI设计了上述四个数字模型与外部硬件实物的接口。
信号采集、转速测量模块如图3所示。信号采集模块能够将采集到的物理信号经过A/D转化,输出为数字信号。驱动电机转速测量模块在本研究中被应用于获取经编码器输出的方波信号,从而计算出电动车驱动电机实时的转速。
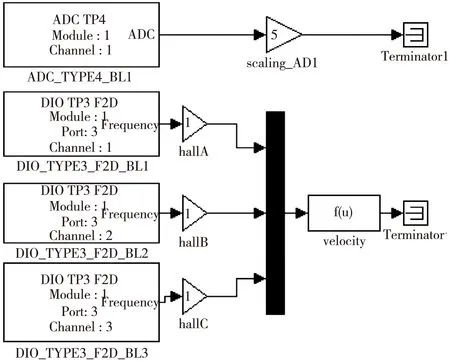
图3 信号采集和转速测量模块
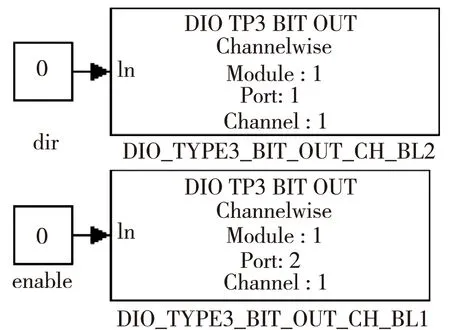
图4 换向与使能模块
换向与使能模块如图4所示。该模块提供使用数字输出的通道方式写入,实时改变驱动电机的工作状态。该模块有两个模式,第一个模式为0,表示电机正转或停止;第二个模式为1,表示电机反转或启动。
如图5所示,速度控制模块对指定的PWM输出通道更新PWM周期和占空比;占空比的范围在0~100%,通过设置占空比的值来得到电机相应的转速。我们设定电动车期望的车速,经过主减速器和差速器等动力传递得到如图6所示的电动车驱动电机输出期望转速,从而得到驱动电机所需要的占空比。

图5 速度控制模块
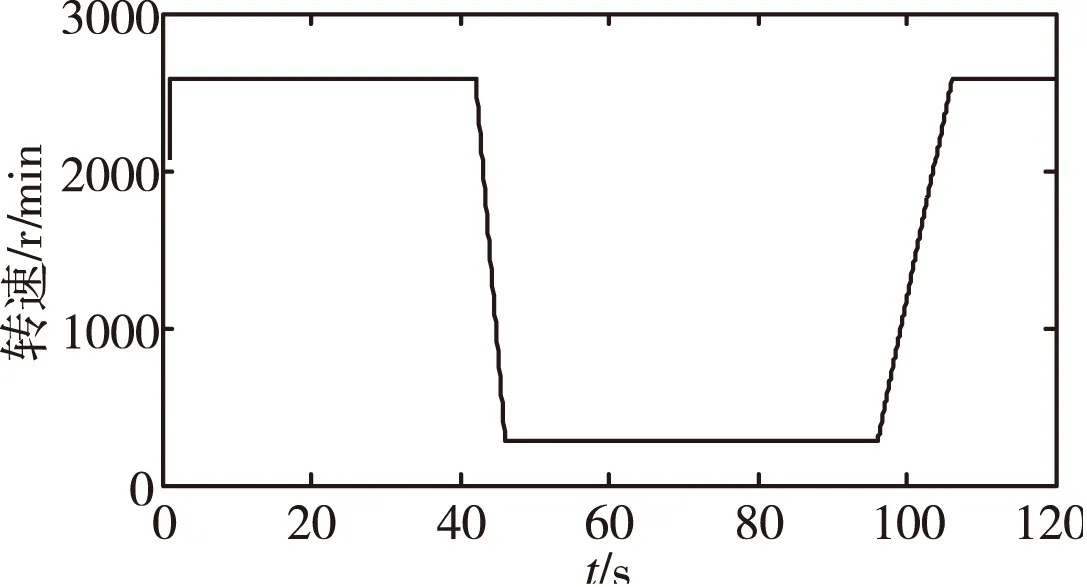
图6 控制器输出的期望驱动电机转速
当dSPACE与PC中的Matlab/Simulink建立连接后,选择了RTI实时接口库中的信号采集模块、驱动电机转速测量模块、换向与使能模块和速度控制模块来建立PWM生成模型、测速模型、换向与启停模型以及速度控制模型。模块输出与硬件端口对应关系如表1所示。将MicroAutoBoxII硬件接口与相应的物理硬件接口相连,从而完成如图7所示的整个半实物仿真实验平台的设计。
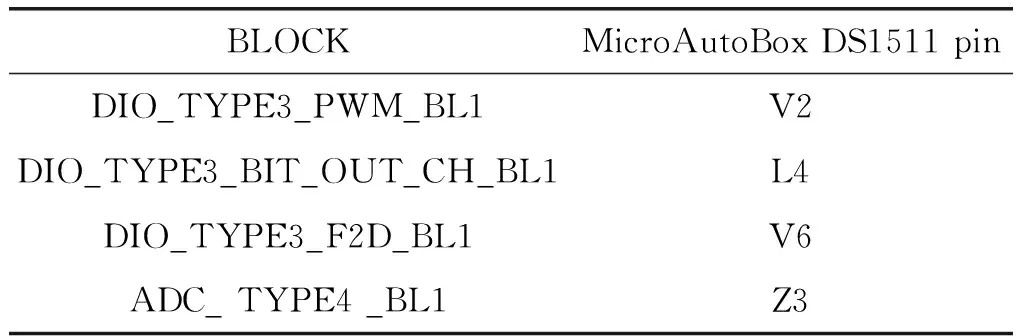
表1 硬件接口
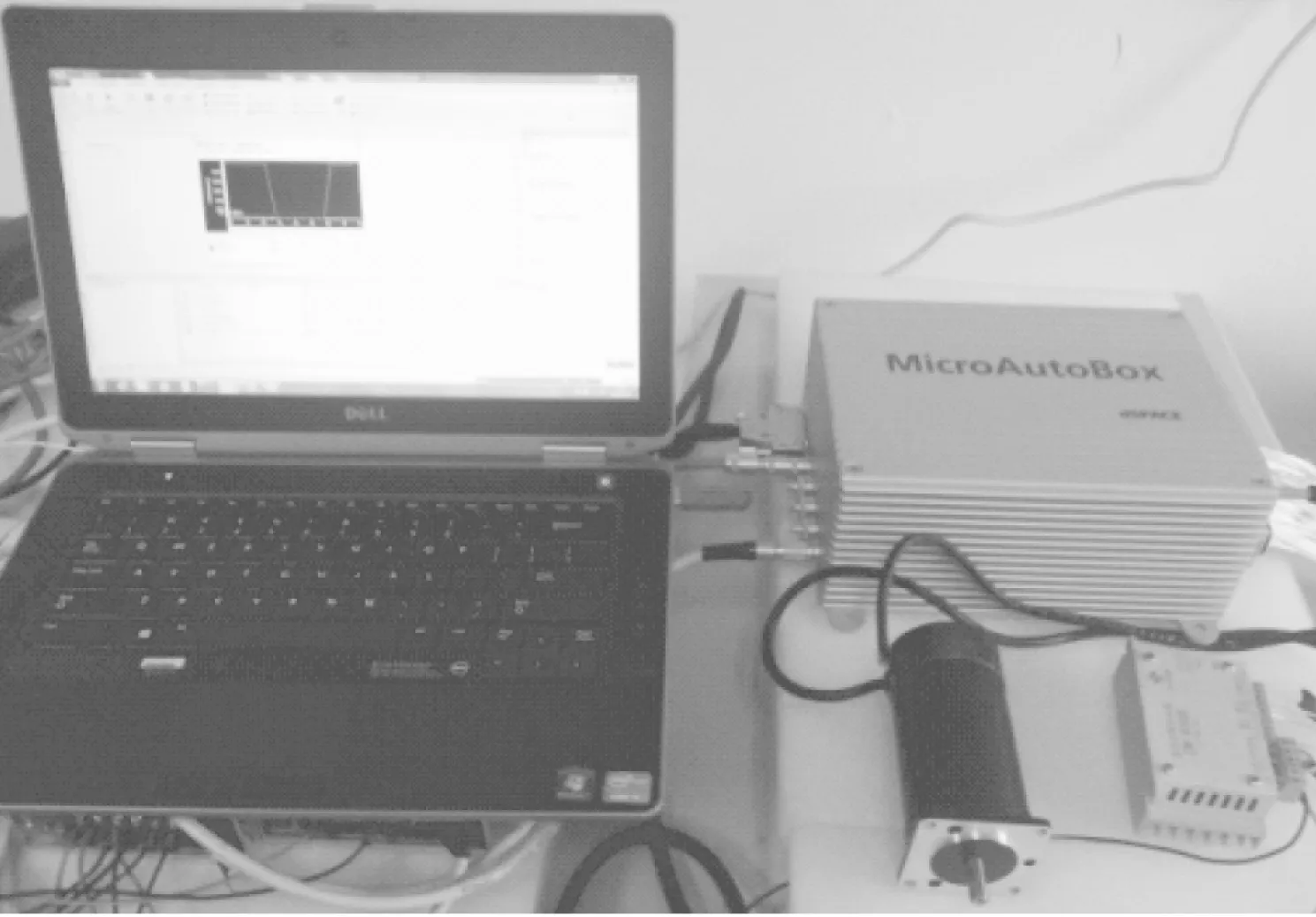
图7 半实物仿真平台
3实验结果与分析
在PC机中的Matlab/Simulink中建立控制模型后,通过RTI与Matlab实时工作空间RTW实现从Simulink模型到dSPACE实时硬件代码自动下载,并自动在DS1401组板系统中执行。通过综合实验软件ControlDesk可以实现对实时硬件的图形化管理,建立用户虚拟仪表,实现变量和参数的可视化、试验数据采集以及试验过程自动化管理。图8显示的为电机控制在ControlDesk中实时工作界面。可以在电机工作的同时改变输入占空比,换向以及目标速度等参数,并且实时获得驱动电机速度响应曲线。
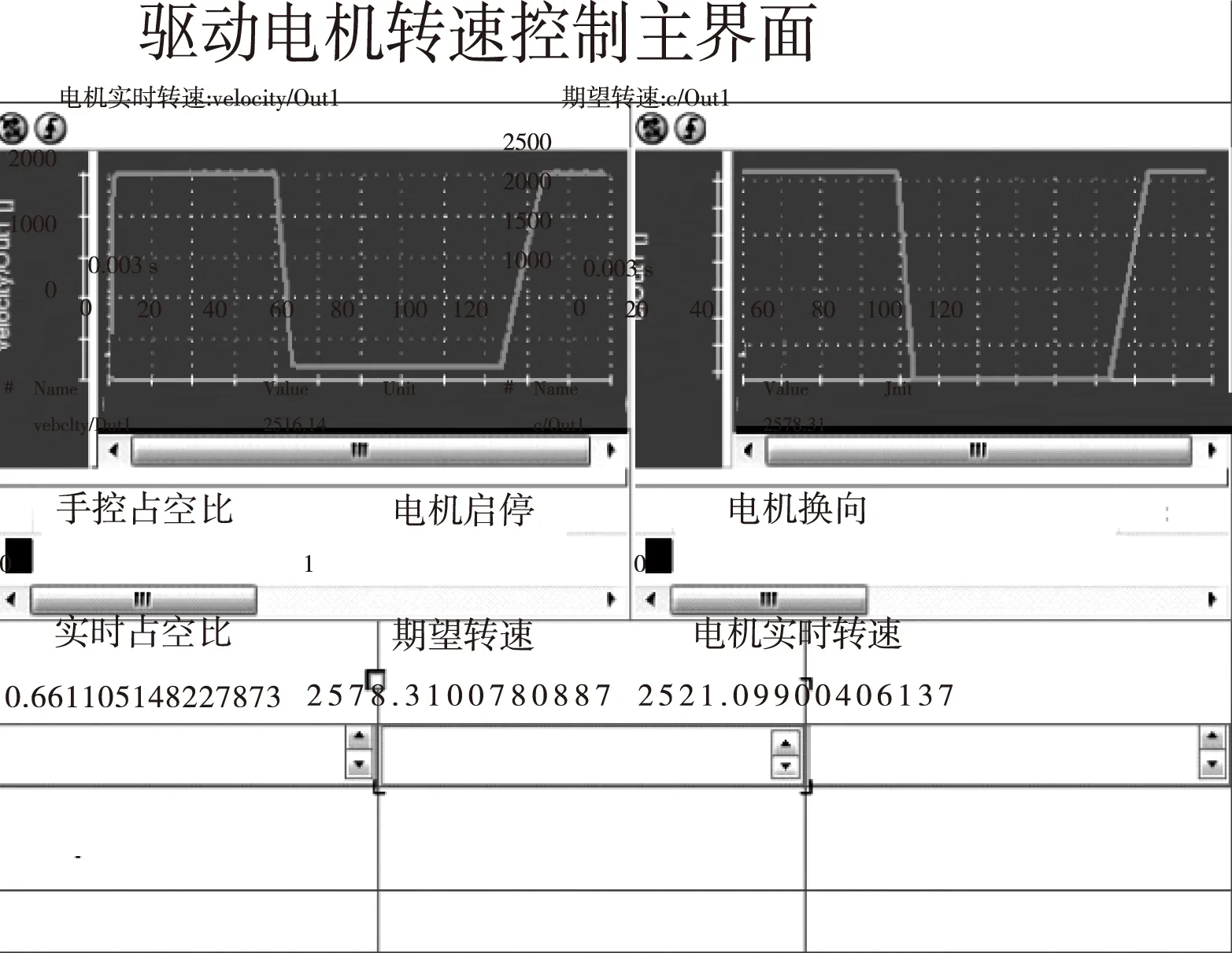
图8 ControlDesk虚拟仪表测试界面
如图9所示为电机响应期望转矩跟随曲线。图10为电机实际转速和期望转速误差,可知电机在恒定转速时能够保持较小的误差;在电机转速突然升高或降低时,误差会产生一定的波动。当电机由低转速升高时,可得到误差在9%左右,这是由于传感器在低速精度不高引起的。在电机由高转速下降时,电机转速误差保持在5%以内,取得了较好的控制效果。通过对直流电机进行脉宽调制,实现了对电动机输出转速进行的有效的控制。
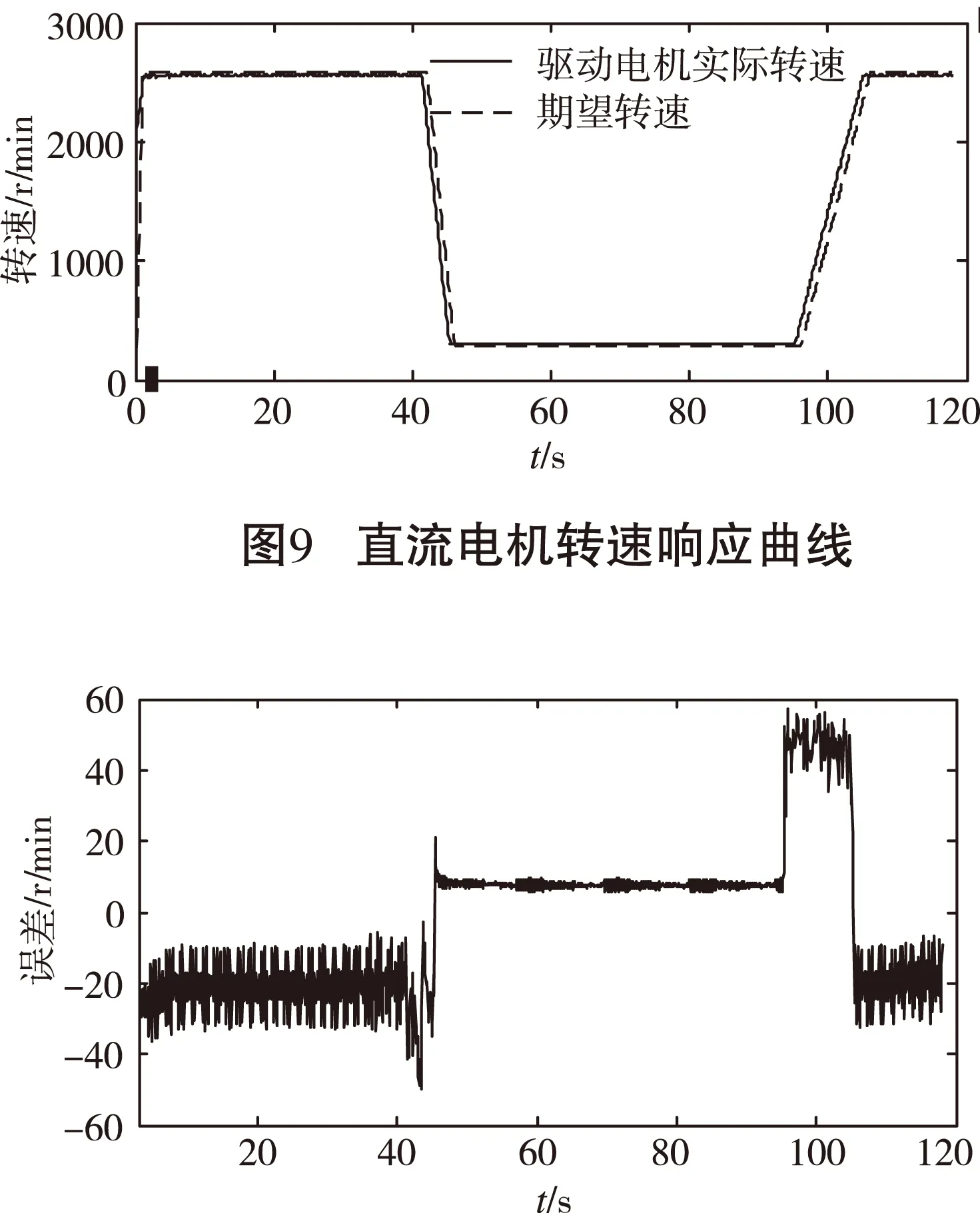
图10 驱动电机期望速度与实时速度误差
4结论
基于dSPACE的半实物仿真控制技术,搭建了驱动电机半实物仿真实验平台,开展了驱动电机的转速控制实验,取得了良好的控制效果。该实验平台通过dSPACE系统与Matlab/Simulink的无缝连接,在Matlab中搭建控制模型,实现控制参数的实时调整,并能够方便的观测和验证控制算法的控制效果,从而提高控制系统设计质量与效率。本工作研究的快速控制原型半实物仿真技术,可以为下一步电动车的实车控制研究打下基础。
参考文献
[1]Li K Q, Chen T, Luo Y G, et al. Intelligent environment-friendly vehicles: concept and case studies[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(1): 318-328.
[2]邓冠丰. 电动车用无刷直流电机控制器的研究[D]. 西南大学, 2010.
[3]胡灵杰,李声晋,卢刚. 基于Matlab无刷直流电机控制系统建模与仿真[J]. 机械与电子,2007(12)35-38.
[4]纪志成,沈艳霞,姜建国. 基于Matlab无刷直流电机系统仿真建模的新方法[J]. 系统仿真学报,2003,15(12): 1745-1749.
[5]刘闯. 基于ST7MC的无刷直流电机控制系统设计[D]. 浙江大学, 2007.
[6]曹杰,史金飞,戴敏. 基于MEGA8单片机的无传感器无刷直流电机控制系统设计[J]. 自动化仪表, 2005,26(12): 13-16.
[7]倪飞. 基于FPGA的无刷直流电机控制系统实现[D]. 重庆大学, 2013.
[8]Velasco F E H, Garcia N T, Garcia F A. Rapid control prototyping of a permanent magnet DC motor using non-linear sliding control ZAD and FPIC[C]//2012 IEEE Third Latin American Symposium on Circuits and Systems. IEEE, 2012:1-4.
[9]潘峰,薛定宇,徐心和. 基于dSPACE半实物仿真技术的伺服控制研究与应用[J]. 系统仿真学报,2004,16(05): 936-939.
[10]王广玮,赵津,张向南,等. dSPACE快速控制原型技术在无刷直流电动机控制中的应用[J]. 现代制造工程,2015(01)20-23.
中图分类号:TP273
文献标识码:A
文章编号:1002-6886(2016)03-0001-04
基金项目:国家自然科学基金项目:面向多目标的智能车辆队列纵向与横向控制方法研究(61164007);贵州省重大科技专项计划项目:车用发动机热交换系统关键技术研究与产业化,黔科合重大专项字(2014)6004。
作者简介:王建强(1989-),男,现为贵州大学机械工程学院车辆工程专业硕士生,主要从事智能交通系统方向的研究。
通讯作者:赵津(1973-),男,2010年毕业于法国里尔中央理工大学自动控制专业,获得博士学位,教授,主要从事汽车动力学、智能交通系统方向的研究。
收稿日期:2015-11-26
Driving motor control based on dSPACE rapid control prototyping
WANG Jianqiang, ZHAO Jin, NING Youjiang
Abstract:The semi-physical simulation technology RCP((Rapid Control Prototyping) provides a convenient method for the development of control systems and controller simulation tests. It also allows researchers to develop control algorithms and carry out simulation tests more efficiently. We established a real-time semi-physical simulation platform by RCP based on dSPACE, and carried out control experiments on the driving motor for electric vehicle. The results showed that, the system controlled the driving motor successfully, and the motor was able to trace the expected speed input.
Keywords:driving motor; dSPACE; DS1401; ControlDesk