基于可变增益的动力翼伞反步降高控制
2016-07-20陈自力邱金刚苏立军
陈自力 张 昊 邱金刚 苏立军
军械工程学院无人机工程系,石家庄050003
基于可变增益的动力翼伞反步降高控制
陈自力 张 昊 邱金刚 苏立军
军械工程学院无人机工程系,石家庄050003
针对无人动力翼伞稳定航速下的降高控制问题,提出一种基于可变增益的自适应反步控制策略。根据翼伞纵向模型推导了稳定航速下尾沿偏转反步控制律,并通过对增益参数的合理设计,消除了控制律中的复杂非线性项,避免了传统反步法中虚拟量的复杂导数问题,使控制器具有简单的参数可调节形式。利用模糊逻辑系统对可变增益参数进行在线调节,优化了控制器性能。将控制器应用于外部干扰条件下的动力翼伞降高控制中,结果表明控制器具有较小的稳态误差和较高的跟踪精度。
无人动力翼伞;可变增益;反步法;降高控制;模糊系统
无人动力翼伞(Unmanned Powered Parafoil, UPP )作为一种新型无人飞行系统,以其优秀的飞行性能和在侦察监视、物资投送和防火治霾等任务中的应用优势,逐渐成为无人软翼飞行器领域的研究热点[1]。UPP仅对翼伞空投系统的结构稍加改进,增加了以螺旋桨为主的动力装置,增强了高度与速度的可控性以及姿态的灵活性,扩展了其应用空间,因此,纵向通道的高度控制是UPP不同于空投系统的特殊控制问题。
目前高度控制主要依靠改变推力的方式,该方式在起飞与爬升阶段具有一定优势,但在降高过程中,存在跟踪精度不高,姿态稳定性差的缺陷。针对以上问题,研究人员提出了一些降高控制方法。Gideon[2]建立了对象六自由度线性化模型,并对两通道PD控制方法进行了研究和验证。Chrystine[3]分析了不同自由度模型对PID控制器控制精度的影响,并提出了增稳方案。Michael[4]提出了基于翼伞尾沿偏转的可变迎角自适应滑翔率控制策略,并进行了相应的实验研究。Alex[5]采用上下翼面增加扰流切口的方式,提高了尾沿偏转的气动效率,提高了控制的有效性。Formal'skii[6]和Yang[7]等建立了翼伞非线性模型,研究了结构参数、马力以及尾沿下偏量对纵向运动性能的影响,为控制策略研究提供了模型基础。国内对这一领域研究起步较晚,张兴会[8-9]针对翼伞系统降落过程建立了六自由度模型,设计了PID控制器,对航迹跟踪过程中的纵向误差进行了有效修正。以上研究中,基于改进物理结构的方法增加了系统的可控性,但对所增加的控制通道缺乏系统的控制策略;基于线性化模型的控制方法具有局限性,当模型在实际运动中表现为非线性特性时,无法保证系统的稳定性。
为克服上述线性控制方法的不足,提出了一些非线性控制方法,比如反馈线性化、动态逆和反步法等。其中,反步法在此方面发展较快,其原理是通过构造Lyapunov函数,逐层递推并设计虚拟控制量实现对前一层系统的镇定,然而,反步法递推过程中需不断对虚拟控制量进行求导,当系统阶数较高时,计算过程变得非常繁琐[10]。
本文以无人动力翼伞纵向模型为对象,针对反步控制方法存在的缺陷,提出了一种基于可变增益的自适应反步控制策略。首先,基于反步法和Lyapunov稳定性思想,推导了尾沿偏转反步控制律,通过合理设计增益参数消除了控制器中的部分非线性项,避免了对虚拟控制量多次求导后的复杂形式,减少了可调增益个数,简化了控制器结构;然后,采用模糊逻辑系统对增益参数进行在线调节;最后,将所提算法应用于不同初始状态和外界干扰条件下的降高控制中,仿真结果验证了控制器的有效性。
1 UPP纵向平面模型
不考虑橫侧面滚转运动,在稳定航速uc下,采用尾沿下偏进行降高控制,UPP纵平面动力学方程为
(1)
其中:
(2)
式中,系统状态量[qw]T分别为俯仰角速度q和纵向速度w;u为前向速度;m表示UPP质量,mq和mw分别表示翼伞绕机体轴作俯仰运动和沿机体轴作垂向运动时,流体产生的附加质量;M(·)为气动力参数;Ιy为绕y轴的转动惯量;G为重力;δa为尾沿下偏产生的纵向控制力矩;Δτ表示有界扰动项和与系统状态相关的模型不确定性。
假设进行稳定航速下的低空降高控制,纵向速度w相对于前向速度u较小,可以忽略,运动学方程可简化为:
(3)
式中,系统状态量[zθ]T分别为飞行高度与俯仰角。
2 控制器设计
2.1 可变增益反步控制方法
Step1 定义高度误差ze=zc-z,构造如下Lyapunov函数
(4)
求导,并将式(3)代入(4)得
(5)
k1=-l1ze,l1>0
(6)
对式(5)进行变换,并将式(6)代入式(7),整理得

(7)
定义
θe=θ-k1
(8)
Step2 结合式(4),构造Lyapunov函数
(9)
式中,c1>0,对上式两边求导,将式(7)代入得

(10)
由式(8)可得
(11)
将上式代入式(10),得
(12)
进一步,由θ=θe+k1,式(12)可变换为
(13)

(14)
此时设计俯仰角速度虚拟控制量k2为
k2=-l2θe,l2>0
(15)
将式(15)代入式(14)得

(16)

Step3 结合式(9),构造如下Lyapunov函数
(17)
式中,c2>0,对上式求导,并将式(16)代入得
(18)
由式(15)可得
(19)
将上式代入式(18)得

(20)
根据UPP动力学模型式(1)和(3),最终控制输入可表示为
(21)
式中,l3>0,将控制输入代入式(20)得
(22)
将式(21)中间变量替换为系统状态变量得
δa=-mq(p1ze+p2θ+p3q)-
(mql1l2sinθ+Δτ)
(23)
式中,
(24)
由式(21)可以看出,控制输入中仅有一项为非线性项,其余均为系统状态的线性组合,具有简单的增益调节形式。
为了进一步说明所提方法的有效性,现采用传统反步法设计控制器[11],最终控制输入为:
δa=-mq[(β1β2β3+β3u)zesecθ+sinθcosθ+
(β1u+β2)·qtan2θ+(β1u+β2+β3)q+
(u+β1β2)qzesinθsec2θ+β1zecosθ+
(u2+β1β2u+β1β3u+β1β3)tanθ-Δτ]
(25)
式中,βi>0为控制器增益系数。
对比控制输入式(23)与(25)可以看出,相比于传统反步法,所提方法具有更简单的结构形式,更有利于工程实现。
2.2 增益参数调节
由所设计控制器式(23)可以看出,控制输入中仅包含一项非线性项,其余均为系统状态的线性函数组合,具有明显的PID参数组合形式,因此可借鉴PID参数调节方法,采用模糊策略对增益参数(p1,p2,p3)进行在线调节,优化控制器性能。

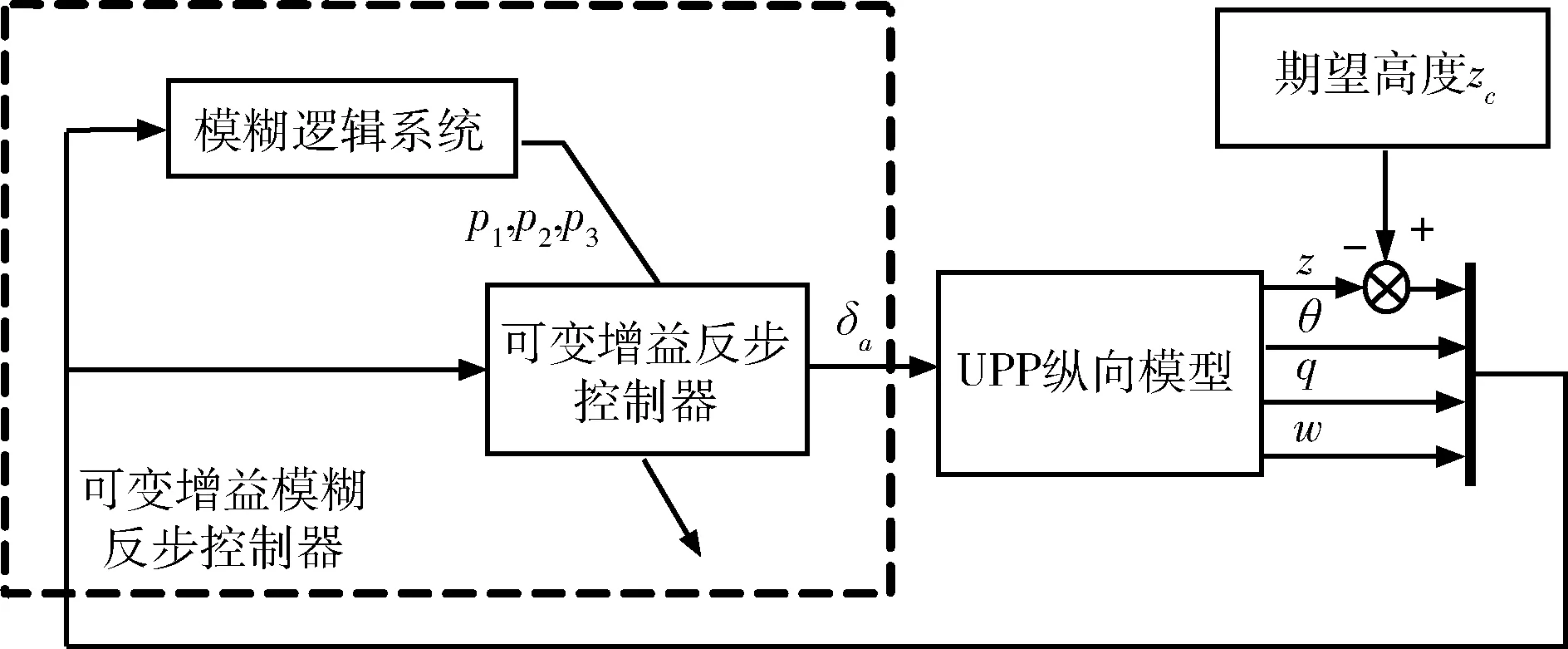
图1 控制器结构框图
3 仿真分析
以实验室自行设计改造的试验型无人动力翼伞为研究对象,建立动力学模型,其结构参数如表1所示,气动参数参考不同展弦比翼伞辨识数据[13],采用本文提出的可变增益反步控制器进行降高控制,分别对不同初始条件和存在外部干扰时的控制效果进行仿真分析。
在含有干扰作用条件下对所提方法进行仿真分析。设定高度变化如式(26),初始状态为[zθqw]T=[50 0 0 0]T,初始增益参数
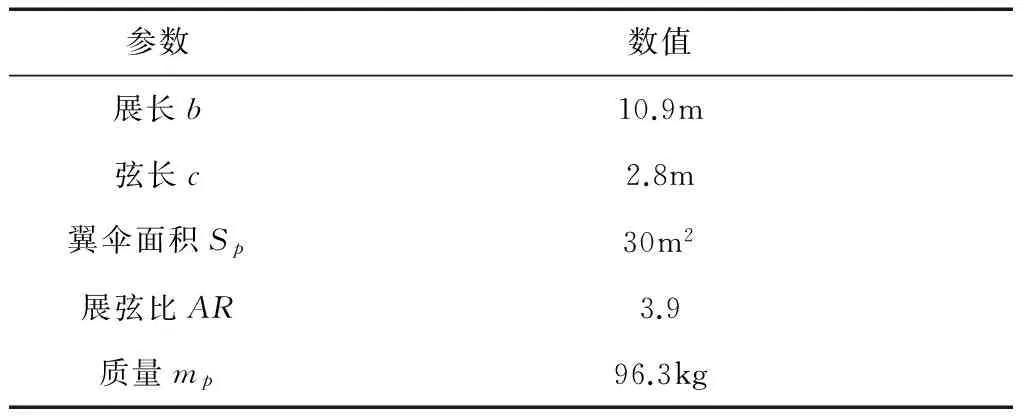
表1 UPP主要结构参数
为p1=0.06,p2=0.5,p3=20,仿真过程中加入式(27)所示的干扰作用,
(26)
Δτ=5sin(0.03πt)+3w+5q
(27)
图2比较了含有外界扰动情况下可变增益模糊反步控制器与自适应PID及传统反步法的高度跟踪情况。图中可见,PID控制器在遇到外界干扰作用时效果变差,无法实现对时变扰动的抑制,控制输入容易陷入饱和区,无法保证跟踪精度,而本文提出的方法具有自适应机制,能够对扰动进行补偿,保证了跟踪性能,且相比于传统反步法,对参数摄动的适应性更强,响应速度更快。在图3~4中对3种方法的控制输入和系统状态做比较,且由图4的状态变化可以看出,系统纵向速度相对于前向速度很小,设计控制律时可以忽略。图5为增益参数调节曲线,优化后的增益值为p1=0.063,p2=0.505,p3=12.9。
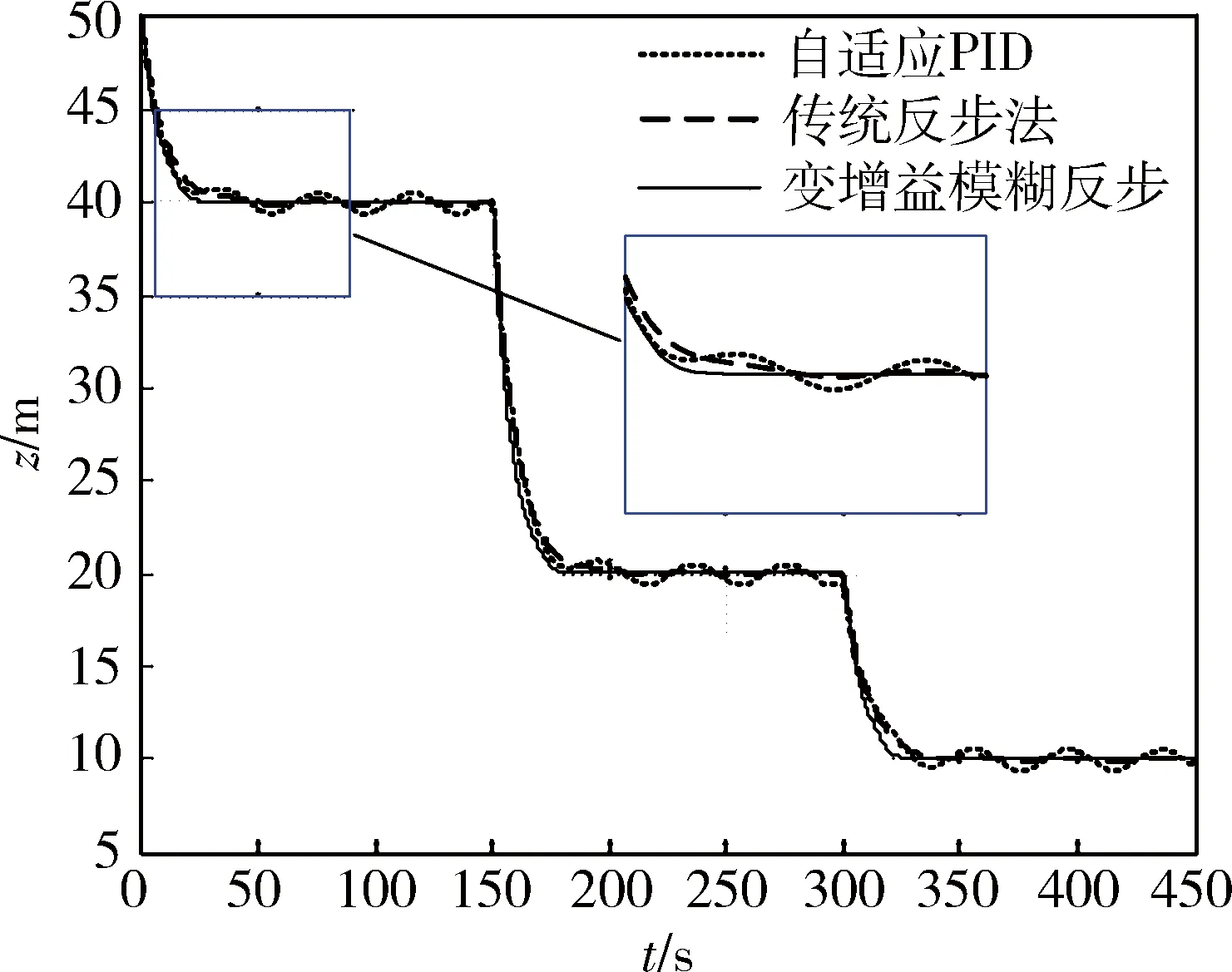
图2 高度控制曲线
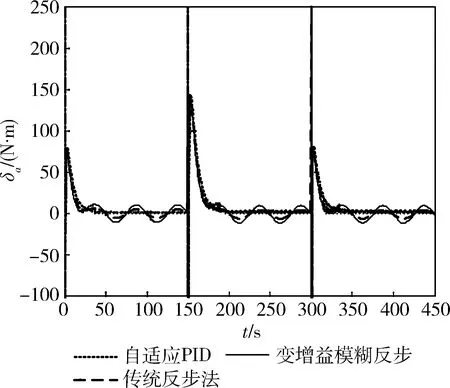
图3 控制输入曲线
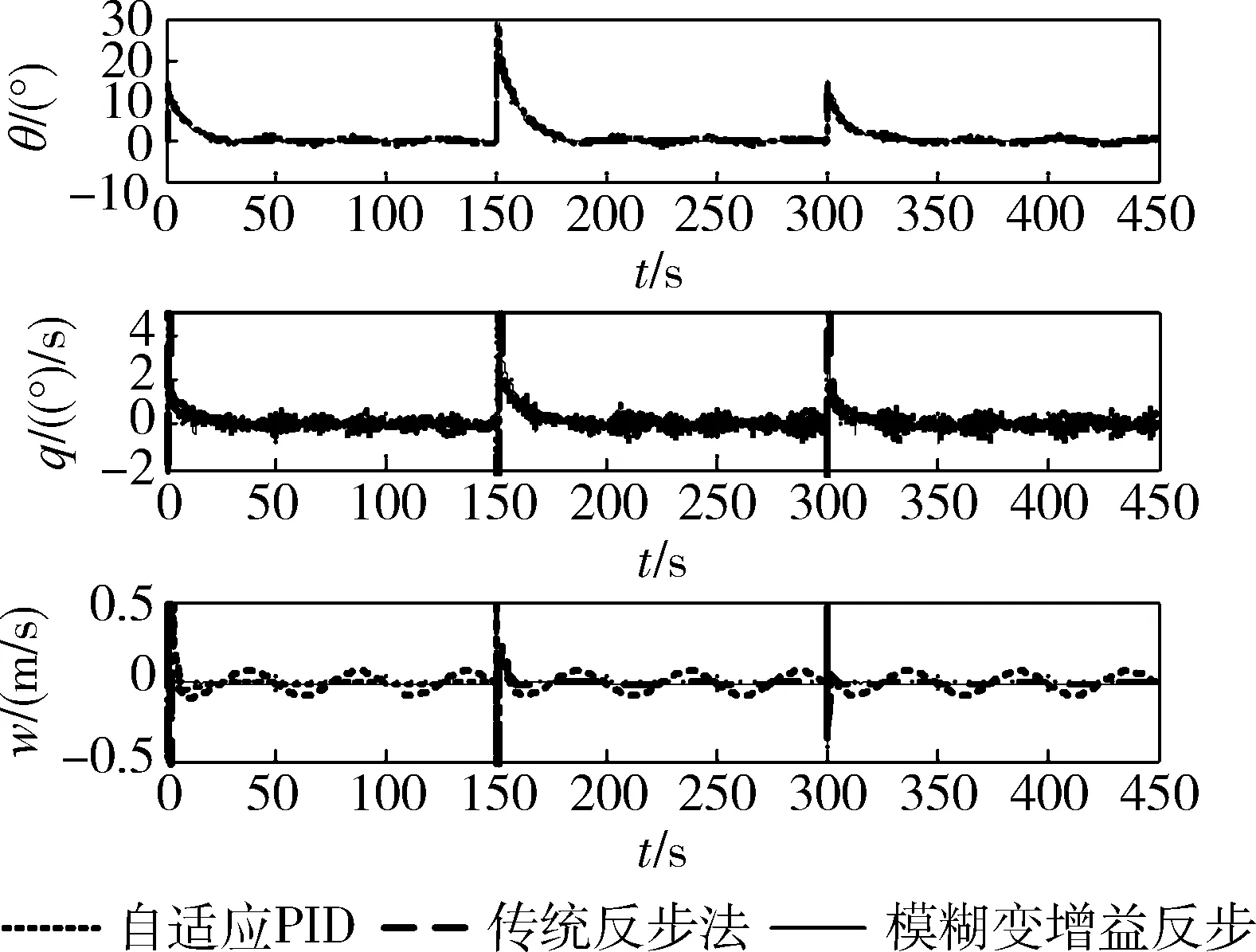
图4 系统状态响应曲线
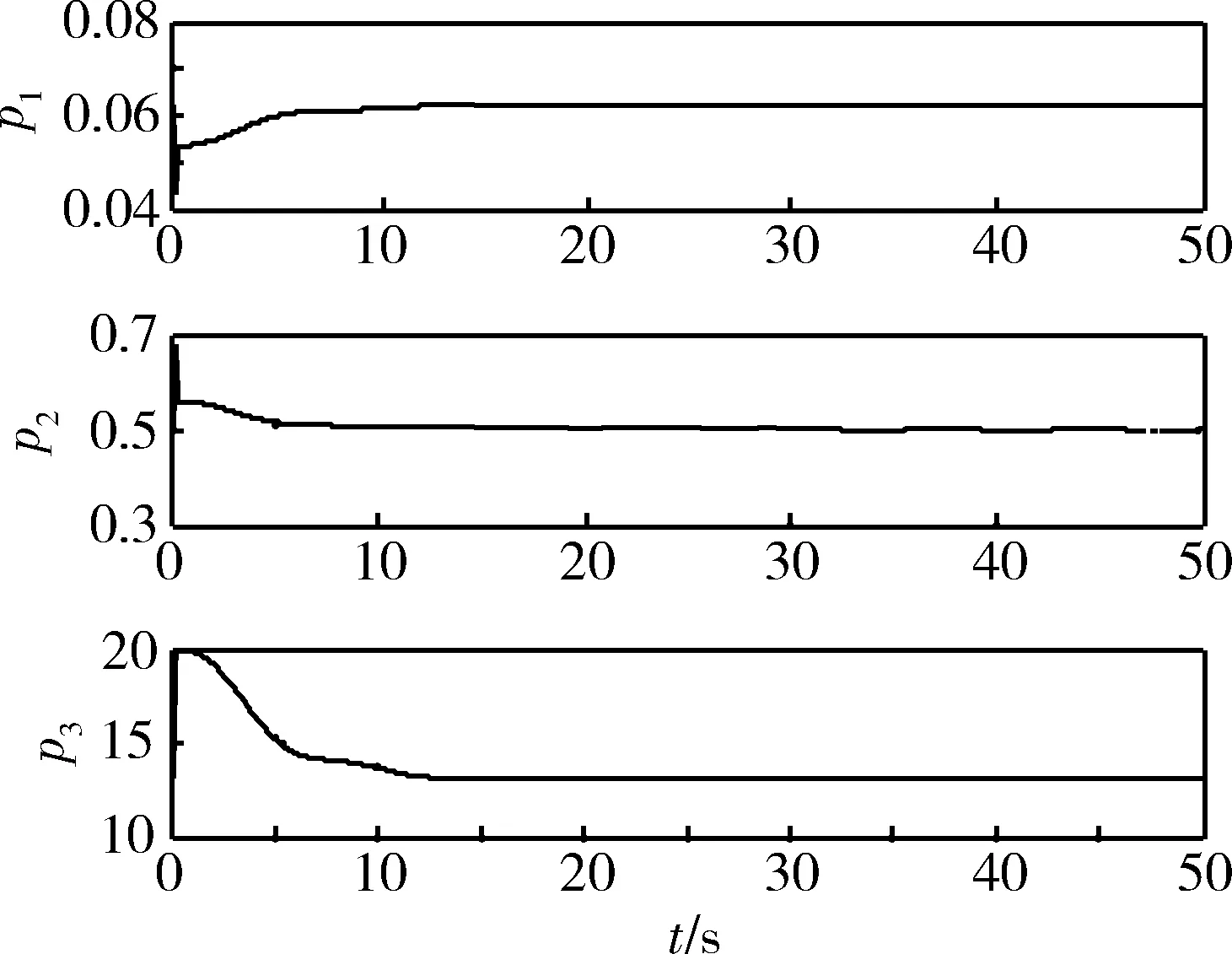
图5 增益参数调节曲线
4 总结
针对无人动力翼伞稳定航速下的降高控制问题,提出了一种基于可变增益的自适应模糊反步控制方法。根据系统数学模型逆向反推构建了高度控制器,通过合理设计控制参数,避免了传统反步法中虚拟量的复杂导数问题,控制器具有更简单的形式,并采用模糊逻辑系统对控制器增益进行在线调节。针对不同初始状态和外部干扰条件下的控制效果进行了仿真实验,结果表明,所提方法与自适应PID及传统反步法相比具有较小的稳态误差和较高的跟踪精度,适合于UPP的自主降高控制。
[1]LiuH,GuoL,ZhangY.AnAnti-DisturbancePDControlSchemeforAttitudeControlandStabilizationofFlexibleSpacecrafts[J].NonlinearDynamics, 2012, 67(3): 2081-2088.
[2]GideonK.FlightControlSystemforAnAutonomousParafoil[D].Stellenbosch:StellenboschUniversity, 2013.
[3]ChrystineM,SlegersN.EvaluationofMultibodyParafoilDynamicsUsingDistributedMiniatureWirelessSenors[J].JournalofAircraft, 2012, 49(2): 546-555.
[4]MichaelW,AlekG,MarkC.GlideSlopeControlAuthorityforParafoilCanopieswithVarialeIncidenceAngle[J].JournalofAircraft, 2013, 5(5): 1504-1513.
[5]AlekG,MichaelW,CostelloM.ParafoilControlAuthoritywithUpper-SurfaceCanopySpoilers[J].JournalofAircraft, 2012, 49(5): 1391-1397.
[6]Formal'skii.MathematicalModelingofControlledLongitudinalMotionofaParaglider[J].ComputationalMathematicsandModeling, 2013, 24(3): 418-431.
[7]YangH,LiuC.StudyonPowered-ParafoilLongitudinalFlightPerformancewithaFastEstimationModel[J].JournalofAircraft, 2013, 50 (5): 1660-1667.
[8] 张兴会,朱二琳. 翼伞系统雀降性能及控制研究[J]. 航天控制, 2012, 30(1): 29-32,39.(ZhangXinghui,ZhuErlin.TheStudyoftheFlare-LandingPerformanceandControlofParafoilSystem[J].AerospaceControl, 2012, 30(1): 29-32,39.)
[9] 张兴会,朱二琳. 基于能量约束的翼伞系统分段归航设计与仿真 [J]. 航天控制, 2011, 29(5), 43-47.(ZhangXinghui,ZhuErlin.DesignandSimulationintheMultiphaseHomingofParafoilSystemBasedonEnergyConfinement[J].AerospaceControl, 2011, 29(5): 43-47.)
[10] 贾鹤鸣, 宋文龙, 陈子印. 基于自适应反步法的自主水下航行器变深控制[J]. 控制理论与应用, 2013, 41(1): 15-20. (JiaHeMing,SongWenLong,ChenZiYin.DivingControlofAutonomousUnderwaterVehicleBasedonAdaptiveBacksteppingMethod[J].ControlTheory&Applications, 2013, 41(1): 15-20.)[11] 胡云安, 晋玉强, 李海燕. 非线性系统鲁棒自适应反演控制[M]. 北京: 电子工业出版社, 2010:158-164.(Hu Yunan, Jin YuQiang, Li HaiYan. Robust of Adaptive Backstepping Control for Nonlinear Systems [M]. Beijing: Publishing House of Electronics Industry, 2010:158-164.)
[12] 佟绍成. 非线性系统的自适应模糊控制[M]. 北京: 科学出版社, 2010.(Tong ShaoCheng. Adaptive Fuzzy Control of Nonlinear System [M]. Beijing: Science Publishing House, 2010.)
[13] Majeed M, Jatinder S. Identification of Aerodynamic Derivatives of a Flexible Aircraft [J]. Journal of Aircraft, 2012, 49(2): 654-658.
The Backstepping Altitude Reduction Control of Powered ParafoilBased on Variable-Gain
Chen Zili, Zhang Hao, Qiu Jingang, Su Lijun
Department of UAV Engineering, Ordnance Engineering College, Shijiazhuang 050003,China
Todealwiththealtitudereductioncontrolproblemofunmannedpoweredparafoil(UPP)underastablevelocity,anadaptivebacksteppingcontrolapproachisdeveloped,whichisbasedonvariable-gain.Thebacksteppingcontrolstrategyoftrailingedgedeflectionwithvariable-gainisproposedunderastablevelocitybasedonthelongitudinalmodelofUPP,andthenonlineartermiseliminatedbychoosingthecontrollerparametersreasonably.Andtherequirementofthecomplicatedderivativeofvirtualcontrolvariableintraditionalbacksteppingmethodisavoided,whichsimplifiestheparameteradjustmentofcontroller.Thegainparameterisadjustedonlinebythefuzzylogicsystemwhichoptimizesthecontrollerperformance.SimulationexperimentisimplementedforthecontrollerappliedtoUPPreducingheightcontrolwithexternaldisturbances,theresultsvalidatethesmallsteady-stateerrorandtheaccuratetrackingability.
Unmannedpoweredparafoil;Variable-gain;Backstepping;Altitudereduction;Fuzzysystem
2015-10-08
陈自力(1964-),男,山西运城人,教授,主要研究方向为无人机导航、制导与控制;张 昊(1988-),男,山西临汾人,博士研究生,主要研究方向为无人机控制理论与应用;邱金刚(1979-),男,洛阳人,硕士,讲师,主要研究方向为无人机控制技术;苏立军(1981-),男,石家庄人,硕士,讲师,主要研究方向为无人机系统一体化设计。
TP273
A
1006-3242(2016)03-0003-05
