基于改进空间矩算法的光纤纤芯轮廓特征点快速提取*
2016-07-19陈忠周德文张宪民
陈忠 周德文 张宪民
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
基于改进空间矩算法的光纤纤芯轮廓特征点快速提取*
陈忠周德文张宪民
(华南理工大学 机械与汽车工程学院, 广东 广州 510640)
摘要:为了提高基于视觉的光纤精密对接的特征点提取速度和定位精度,提出了一种基于改进空间矩算法的光纤纤芯轮廓特征点亚像素快速提取算法.该算法首先对光纤纤芯的初始位置进行快速搜索,进而对纤芯和光纤端面进行边缘追踪,提取出纤芯的边缘;然后采用改进空间矩算法得到边缘的亚像素位置,并对提取到的纤芯边缘点和端面边缘点进行直线拟合,求取光纤中轴线及端面直线方程.实验结果表明,文中提出的光纤纤芯轮廓特征点提取算法相对于传统方法具有提取速度快、抗噪性好和定位精度高的特点,能满足实时精密对接光纤的要求.
关键词:计算机视觉;特征提取;一维空间矩;光纤
随着通信技术的发展,光纤被广泛应用在远程通讯中,光纤对接是光纤网络工程中的关键技术之一.目前,对接光纤的方式主要分为主动对接和被动对接[1].被动对接一般比较简单,但精度不高.主动对接方式又可分为视觉伺服型[2]和光功率伺服型[3- 4].由于能够避免局部寻优点,以及一些特殊情况下不适合采用光功率伺服主动对接[5],因此,基于视觉的光纤对接技术不断发展[6- 8].
在基于视觉进行光纤对接时,快速而高精度的图像处理技术显得尤为重要.在图像处理过程中,一般需要对光纤图像进行边缘提取以求取光纤的中轴线及其特征点,即光纤末端端点的位置.而在提取图像边缘时,传统的方法如Canny、Sobel或形态学算法[9],通常只有像素级精度[10],而且耗时过长,一般不能满足视觉伺服的实时性要求[11].在处理光纤图像时,Chuang等[11]将上下两根光纤分割为4个感兴趣的区域,每根光纤由2个特征点表示,但无法定位光纤端点的位置,同时其特征点的精度仅为像素级.张伟等[12]利用自适应阈值和形态学法求取光纤轮廓,但图像处理时间过长,提取得到的是光纤包层的轮廓而不是光纤纤芯的轮廓.
为了提高视觉伺服系统的性能,文中提出了一种基于改进空间矩算法的光纤纤芯轮廓特征点亚像素快速提取算法.该算法首先对光纤纤芯的初始位置进行快速搜索,进而对纤芯和光纤端面进行边缘追踪,提取纤芯的边缘而非包层的边缘,以避免光纤包层和纤芯因制造误差带来的不同轴问题[13];然后采用改进空间矩算法得到边缘的亚像素位置,并对提取到的纤芯边缘点和端面边缘点进行直线拟合,求取光纤中轴线及端面直线方程;最后基于所建立的远心视觉实验系统获取光纤对接的图像,并与传统方法如Canny、Sobel、形态学算法、传统空间矩算法的快速性、抗噪性及准确性进行对比分析.
1空间矩算法
在图像处理中,利用矩不变特性求取理想边缘模型的边缘值,并用其表征实际图像的边缘,此即为空间矩算法[14- 15].
1.1一维空间矩边缘提取算法
在理想的情况下,物体在成像后,其背景部分完全保持为白色,物体部分则完全为黑色.而实际上,物体边缘部分的灰度值总是渐变的,如图1所示.图中连续曲线f(x)为一维(1D)理想边缘阶跃模型,而离散点P则表示实际成像后的像素点.对于图像中长为n的边缘序列,可用Ii(1≤i≤n)来表示第i处像素的灰度值,Ii在读取图像时获取.
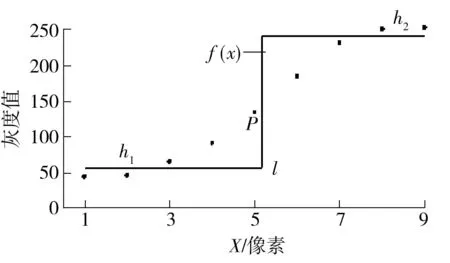
图1 一维空间矩的理想阶跃边缘模型
为了便于分析,文中将理想边缘f(x)归一化为-1≤x<1,其背景和前景灰度值分别为h1、h2,而其边缘位置为l,则归一化后的理想边缘函数为
(1)
其p(p=0,1,2,…)阶空间矩为
(h1-h2)lp+1]/(p+1)
(2)
对实际成像后的边缘序列Ii进行归一化处理,则其p阶空间矩为
(3)
由矩不变特性可知,实际成像和理想边缘的矩应保持一致,即有矩不变方程
(4)
联立前3阶矩不变方程,可解得
(5)
为了得到实际边缘值L,需要将l还原,即有
L=[(l+1)n+1]/2
(6)
1.2改进的空间矩算法
在进行一维空间矩边缘提取时,由点P向两侧均匀选取N个点所形成的2N+1个点构成采样离散序列,如图2所示.采样离散序列的中心位置P的选取对边缘定位精度有很大的影响,为了减小因P的不恰当选取带来的影响,文中采用粗定位和后校验相结合的方法来提高该算法的准确性.
2)精定位.对上述选取的灰度离散序列,利用一阶空间矩求取其边缘.
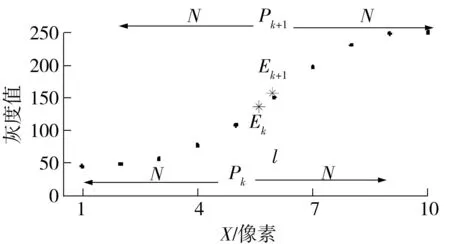
图2 校验粗边缘的一维空间矩算法示意图
Fig.2Schematic diagram of the 1D spatial moment algorithm with checking the coarse edge
2快速特征提取
在对光纤图像进行特征提取时,如果是在图像二维空间中进行运算,如二维空间矩或Canny等算法,则处理时间会较长,不利于光纤的实时对接.单模光纤示意图如图3所示.从图中可以看出,光纤纤芯的边缘清晰且与图像坐标系v轴的夹角较小,因而文中考虑综合运用光纤初始搜索、边缘径向追踪算法和改进空间矩算法来提取纤芯边缘及光纤端面,以快速提取光纤中轴线及特征点.
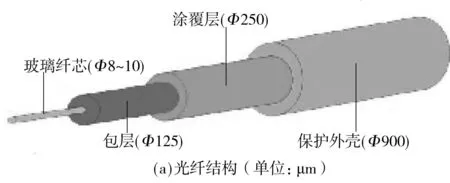
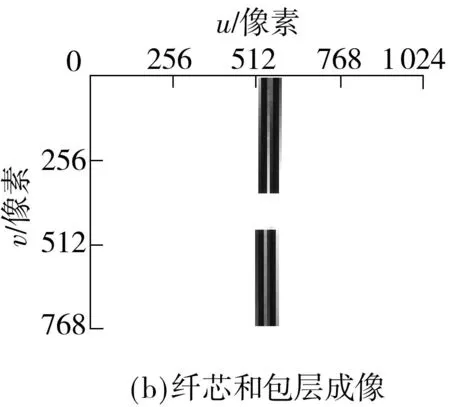
图3 单模光纤示意图
2.1光纤成像特征
从图3(a)可知,单模光纤从外到内分别为保护外壳、涂覆层、包层、玻璃纤芯(纤芯).在对接光纤过程中,涂覆层和保护外壳会被剥掉,只剩下纤芯和包层部分.纤芯和包层成像如图3(b)所示.由于纤芯与包层的折射率不同,图像中黑色部分为光纤的包层,而位于光纤包层内的白色部分则为纤芯.由于光信号在纤芯中传播,因此文中对纤芯边缘而非包层边缘进行图像处理.
2.2光纤初始搜索
在光纤对接全过程中,光纤调节的角度一般很小.光纤在成像后,其轴线与v轴大致平行,如图3(b)所示.为了避免在整幅图像内进行图像处理,可以在第m(m为正整数)行进行粗、精两步快速搜索方式定位包层和纤芯的初始位置.
如图4所示,在对第m行的像素序列进行包层粗搜索时,若粗搜索步长s选取过大,则可能会搜索不到光纤,而若选取过小,则算法会比较耗时.因而,文中选取光纤包层和纤芯的距离作为粗搜索步长.假设粗搜索得到的包层(黑色部分)的两端分别为a和b,则可以认为纤芯位于a和b之间,即减小了对纤芯的搜索范围.然后对此搜索范围逐像素进行精搜索,并利用1.2节中粗定位和后校验方法求取纤芯的左右端点A和B.
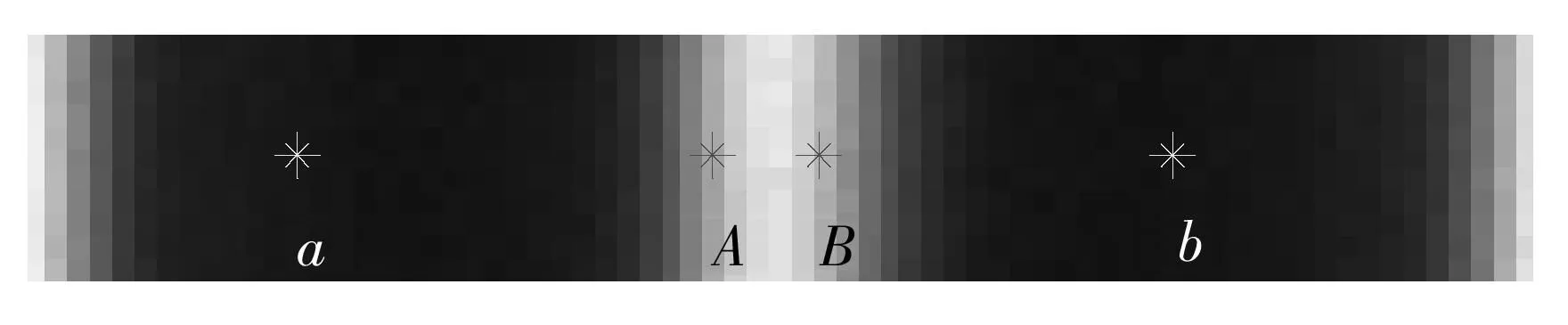
图4 光纤初始搜索
2.3光纤纤芯的边缘追踪
经初始搜索后,可以得到纤芯左边缘点A1(u1,v1),其中(u1,v1)为边缘点在图像坐标系下的坐标值.以同样的方法得到纤芯第k行(k>m)的左边缘点A2(u2,v2),构成初始点集{Ai(ui,vi),i=1,2}.对这个初始点集进行一步步搜索,直到完成整个光纤的搜索过程.具体过程如下:
1)预测下一个边缘点的位置.为了能更快地完成纤芯追踪过程,选取一较大追踪步长s(s为正整数)进行跳跃式追踪.由于追踪步长过大会降低图像处理的精度,而步长过小会使算法过于耗时,故文中选取s=10.设此时初始点集数为t(t≥2),则下一个点At+1(ut+1,vt+1)的位置为
(7)
2)判断预测点At+1是否为纤芯边缘点.为了能判断纤芯是否延续到此预测点,可以对预测点At+1和At之间的每个像素点进行检验,若所有的像素点灰度值与纤芯一致,则表明该预测点为纤芯的边缘点;否则,所检验的像素点不在光纤之内,即表示已经搜索到纤芯的端点,记录纤芯端点信息Ae(ue,ve),结束追踪,如图5所示.
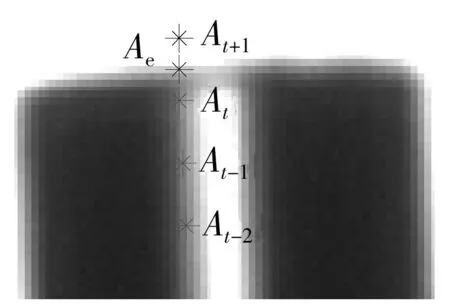
图5 纤芯边缘的追踪过程
3)求取预测点附近的纤芯边缘点.为加快处理速度,设此预测点At+1为1.2节中的粗定位结果.以At+1为中心,向两端均匀取离散点构成离散序列(取样长度为N=5),并通过空间矩法求取该序列边缘点.由于At+1是在步骤1)中通过预测得到的,其值并不准确,有可能会造成离散序列的不恰当选取,降低空间矩算法的边缘提取精度,因而在通过空间矩算法提取边缘后还需要进行校验.设通过改进的空间矩算法得到此序列的边缘值为φ,则可以得到预测点在u轴的准确位置,即
(8)
5)同理得到纤芯右边缘点集{Bi(ui,vi)},此时,纤芯的轴线位置Oi(ui,vi)即为左边缘Ai与右边缘Bi的中心.
2.4纤芯直线拟合
单模光纤的直径非常小,一般来讲,光纤在视场内的长度仅有1mm.对于文中所用的远心相机,空间中的直线被投射为直线.因而,可以将图像中光纤各轴线点Oi拟合成直线.对于已经提取到的纤芯左边缘点集{Oi(ui,vi),i=1,2,…},得到通过其光纤中心点集的直线方程为
au+bv+c=0,a2+b2=1
(9)
由于提取的光纤中心点个数大于2,即求取中轴线方程实际上是一个最优化问题,将点集到直线距离的平方和作为该优化问题的目标函数,即优化问题为
(10)
2.5光纤端面处理
在2.3节中进行光纤纤芯边缘的提取时,若搜索到光纤端部Ae(ue,ve)和Be(ue,ve),则搜索算法停止.此时,光纤端部Ae和Be的定位精度仅为像素级,其对两光纤的间隙有很大的影响,很难满足光纤对接的要求.因而,文中采用改进的空间矩算法对光纤端面边缘进行亚像素定位以提高其精度.
如图6所示,分别以纤芯端点Ae和Be为起点,沿2.4节中光纤纤芯中轴线垂直的方向以一定间隔选取预测点,如图6中Fi(i=1,2,…,6)所示.取样间隔越大,则预测点点数越少,文中取预测点点数为6.可以看出,预测点Fi只是光纤端面边缘附近的点,因此,以预测点Fi为中心,沿v轴均匀提取离散点序列,利用空间矩算法求取实际的边缘位置.为了避免因预测点误差太大而导致边缘位置失真,文中利用1.2节的方法进行后校验,修正其边缘位置以提高定位精度.最后得到修正后的光纤端面点集{Fi(ui,vi)|i=1,2,…}.
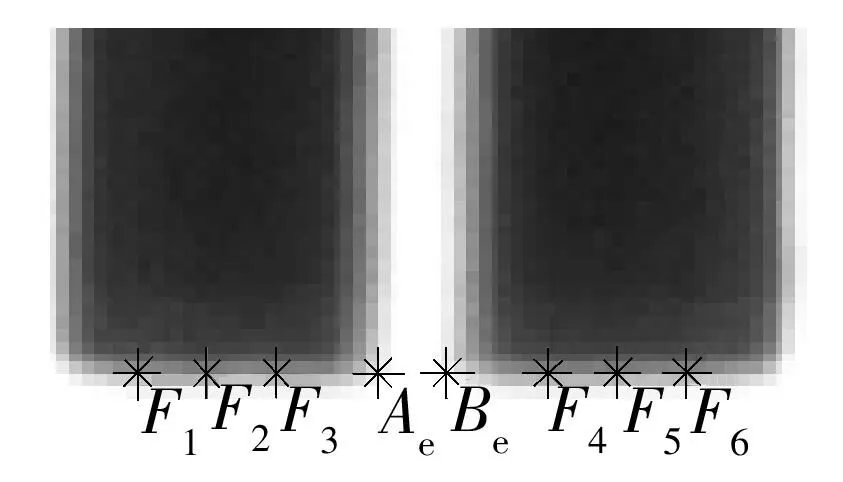
图6 光纤端面定位过程
提取得到光纤的端点后,采用2.4节方法将端面点集{Fi(ui,vi)}拟合成直线.设其端面线方程为
αu+βv+γ=0,α2+β2=1
(11)
光纤的端点可以用端面线和中轴线的交点表示,联合式(9)和(11),即可得到端点P(uP,vP)坐标:
(12)
此时,便可得到上端光纤端点P(up,vp)及其直线方程(9),用同样方法处理下端光纤,可得到下端光纤端点及其直线方程.至此,可得到两光纤在图像中的位置.光纤纤芯特征点提取的迭代过程如图7所示.
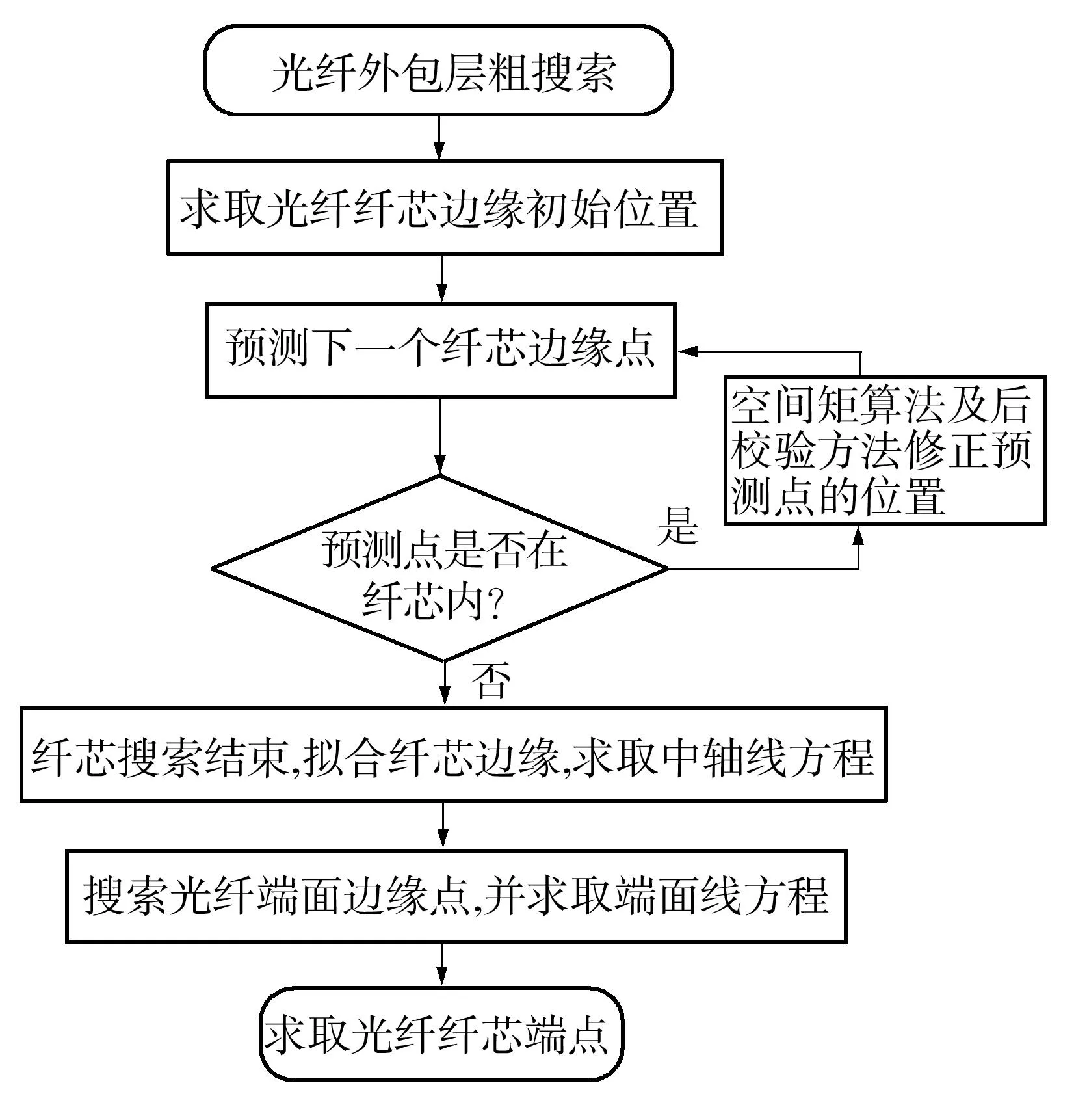
图7 光纤纤芯特征点提取流程图
Fig.7Flowchartofthefeaturepointextractionfortheopticalfibercores
3实验结果与分析
文中采用AVTGuppyProF125B相机搭配MoritexMML02-110D远心镜头来采集光纤图像,如图8所示.采集到的图像大小为1 024×768,如图3(b)所示.
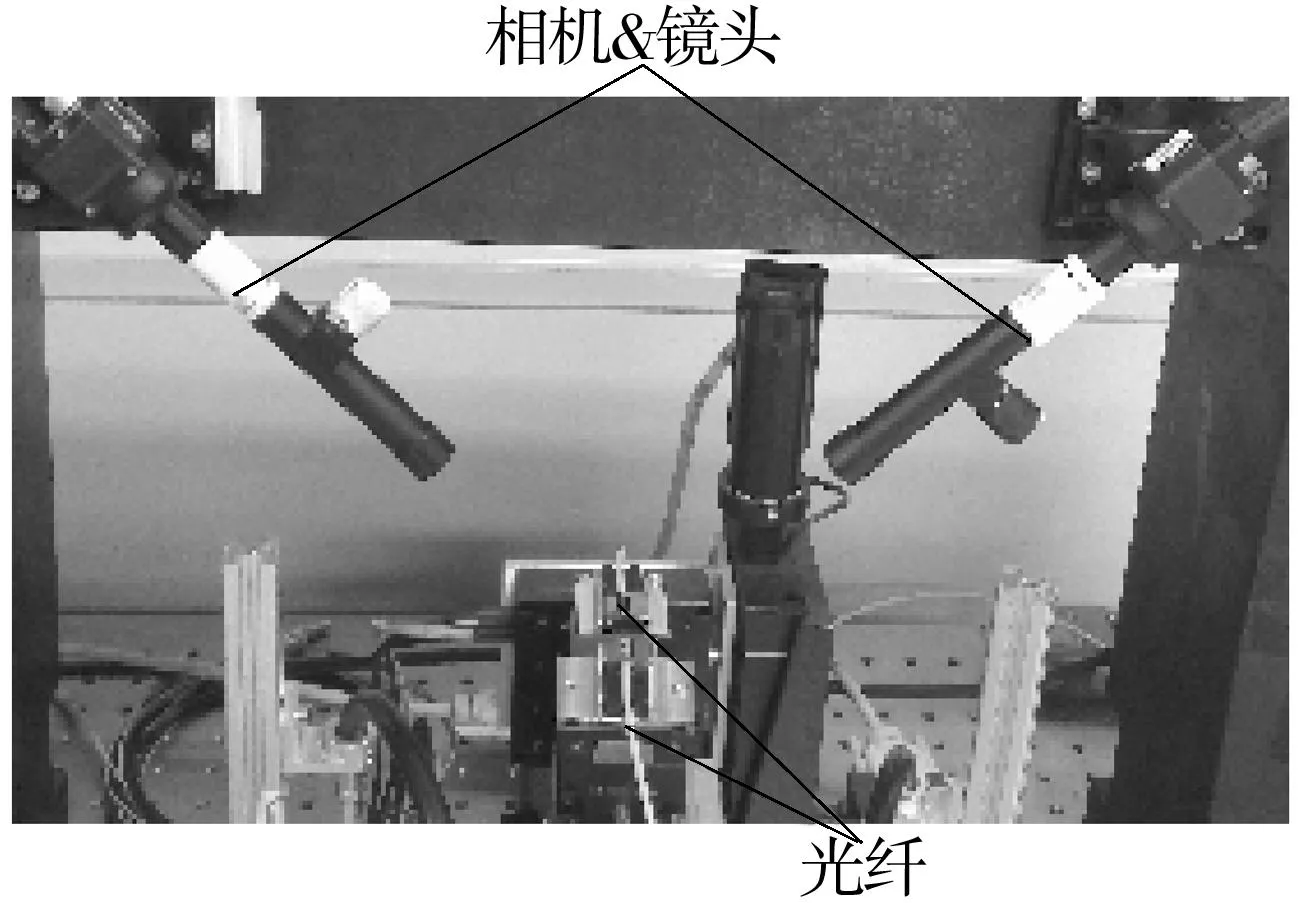
图8 实验装置示意图
3.1时间对比分析
在配置为CPUi3-2120 3.30GHz、4GBRAM的计算机上采用Matlab2010b进行Canny、Sobel、形态学算法、空间矩算法(无后校验过程)及文中算法提取光纤特征点的仿真实验,各运行20次的平均耗时(不计读取图像时间)分别为364.0、72.0、15.0、5.8、6.3ms.其中空间矩和文中算法的耗时均为提取特征点的时间,而Canny、Sobel、形态学算法的耗时为提取图像边缘所用的时间.由此可知,文中算法提取光纤特征点的速度优于传统算法,耗时可以达到毫秒级.同时,由于在利用空间矩算法求取边缘时,文中算法采用校验后再次求取边缘的方法以提高其精度,因而其处理图像时间比无后校验的一维空间矩算法增加了约0.5ms.3.2抗噪性分析

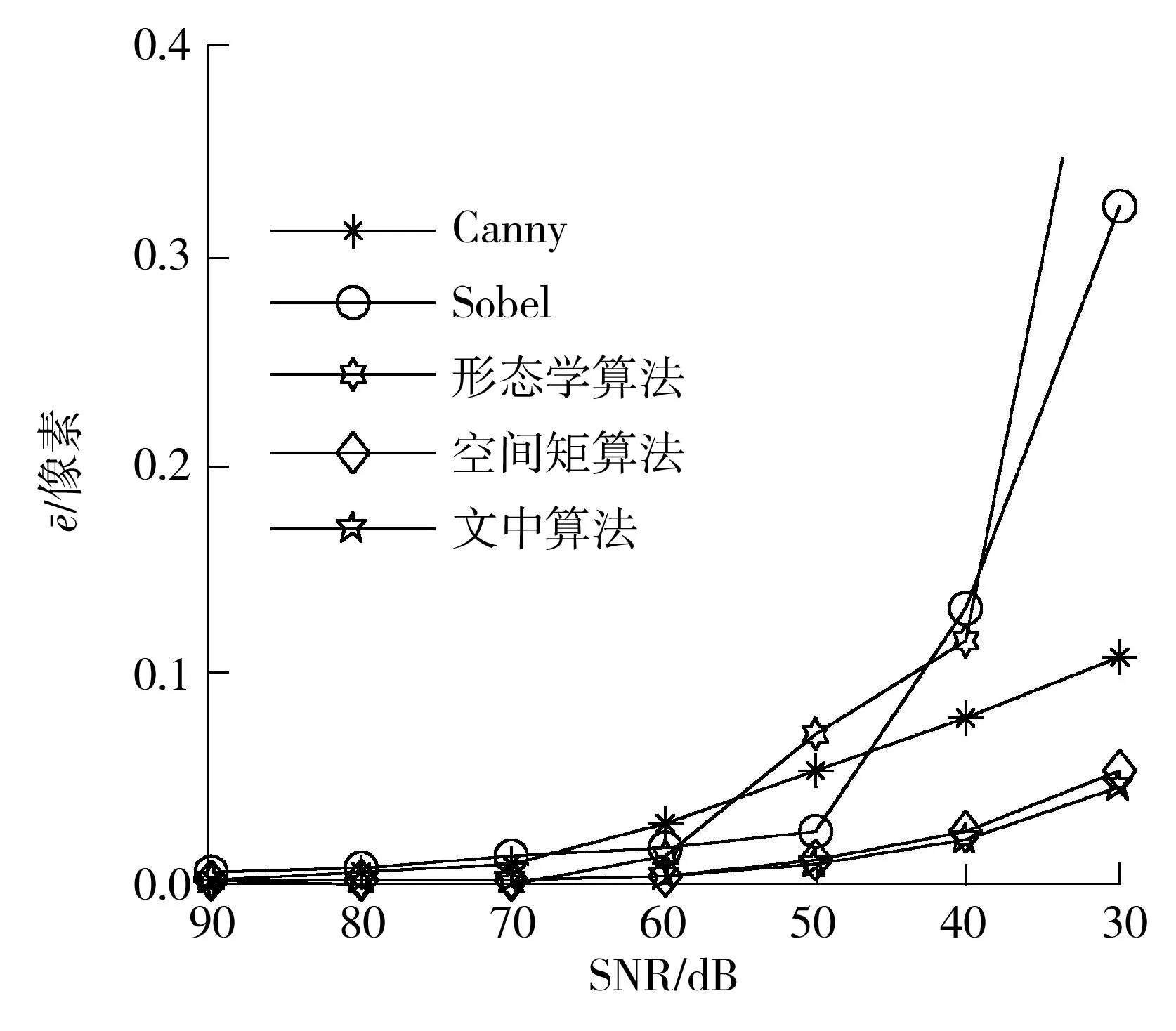
图9 5种算法的抗噪性比较
显然,文中算法较传统算法有更好的抗噪性.与无后校验过程的空间矩算法相比,文中算法加入后校验后具有更好的抗噪性.
3.3准确性分析
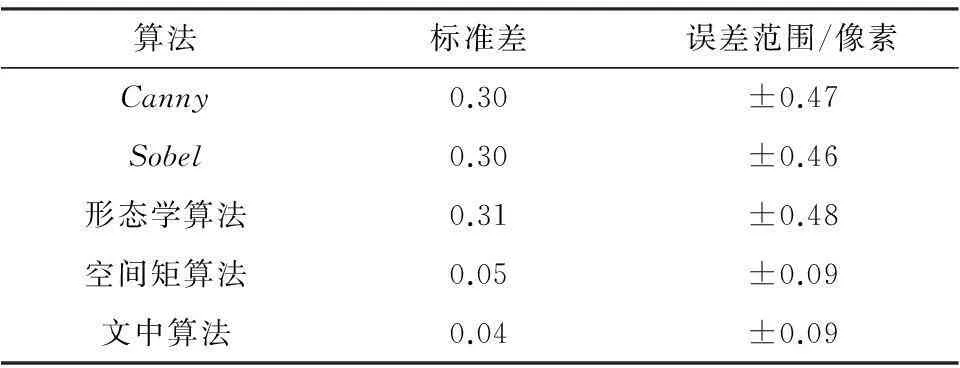
利用已标定后的双目视觉系统(像素当量e=1.91μm/像素)对空间中的光纤进行垂直拍照,并利用纳米位移平台(型号P-611.3,分辨率为1nm,重复定位精度小于10nm)对光纤沿光纤轴向方向移动20次,每次移动的距离为5μm,则光纤在图像中移动距离的理论值为G=5/e.在每次光纤移动过程中,利用视觉系统测量得到光纤端点的位置变化值Di,并将其与G进行比较,5种算法检测光纤端点的误差范围及标准差见表2.
表25种算法的定位准确性比较
Table2Comparisonofdetectionaccuracyamongfivealgorithms
算法标准差误差范围/像素CannySobel形态学算法空间矩算法文中算法0.300.300.310.050.04±0.47±0.46±0.48±0.09±0.09
从表2中可知:加入校验重定位的文中算法检测准确度更高;文中算法提取光纤端点的准确性较传统方法高.在实时光纤对接时,应用文中算法能获得更好的精密光纤对接性能.
4结论
文中提出了一种基于改进空间矩算法的光纤特征点快速提取算法.该算法在提取光纤特征时,追踪光纤纤芯边缘,避免了因光纤外径和纤芯不同轴所导致的对接偏差;在处理大小为1 024×768的大图像过程中,采用了粗、精两步搜索方式,跳跃式地搜索光纤包层和纤芯,从而避免了在全幅图像内进行处理;使用一维空间矩算法而非二维边缘提取算法求取光纤边缘点,使得光纤边缘提取速度远远超过常规方法;采用粗定位和后校验相结合的方法来求取边缘点,使其边缘定位精度不受预测点误差的影响,提高了光纤的定位精度.相比于传统方法,文中算法具有良好的抗噪性及准确性.
参考文献:
[1]BÖTTGERG,SCHRÖDERH,JORDANR.Activeorpassivefiber-chip-alignment:approachestoefficientsolutions[C]∥ProceedingsofSPIE:InternationalSocietyforOpticsandPhotonics.SanFrancisco:SPIE,2013:863006/1- 17.[2]VANG,JOHANFC,TICHEMM,etal.Passivephotonicalignmentwithsubmicrometerrepeatabilityandaccuracy[J].IEEETransactionsonComponents,PackagingandManufacturingTechnology,2013,3(11):1971- 1979.
[3]ZHANGR,SHIFG.Anovelalgorithmforfiber-opticalignmentautomation[J].IEEETransactionsonAdvancedPackaging,2004,27(1):173- 178.
[4]LANDRYAM,KADDOURIA,BOUSLIMANIY,etal.Automatedalignmentofmicrostructuredopticalfibersandconventionalsingle-modefibers[J].OpticalEnginee-ring,2013,52(6):665- 670.
[5]MIZUNOY,NAKAMURAK.Corealignmentofbuttcouplingbetweensingle-modeandmultimodeopticalfibersbymonitoringBrillouinscatteringsignal[J].JournalofLightwaveTechnology,2011,29(17):2616- 2620.
[6]BOUVREEG,ESPINOZAB.Softwaresupportsmultipleopticalfiberalignmentoptions[J].LaserFocusWorld,2014,50(6):45- 48.
[7]ZHENGYu,KAIXiao-chao,DUANJi-an,etal.Automatedvisualpositiondetectionandadjustmentforopticalwaveguidechipsandopticalfiberarrays[J].JournalofCentralSouthUniversity,2015,22(10):3868- 3875.
[8]WENCM,CHENGMY.Positioningaccuracyimprovementofavision-basedopticalfiberalignmentstagepow-eredbyapiezo-actuator[C]∥Proceedingsof2008In-ternationalWorkshoponRoboticandSensorsEnvironments.Ottawa:IEEE,2008:70- 75.
[9]刘清,林土胜.基于数学形态学的图像边缘检测算法 [J].华南理工大学学报(自然科学版),2008,36(9):113- 116,121.
LIUQing,LINTu-sheng.Imageedgedetectionalgorithmbasedonmathematicalmorphology[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2008,36(9):113- 116,121.[10]MAINIR,AGGARWALH.Studyandcomparisonofvariousimageedgedetectiontechniques[J].InternationalJournalofImageProcessing,2009,3(1):1- 11.
[11]CHUANGHS,WENCM,CHENMY,etal.Automaticvision-basedopticalfiberalignmentusingmultiratetechnique[J].IEEETransactionsonIndustrialElectronics,2009,56(8):2998- 3003.
[12]张伟,王乐锋,荣伟彬,等.保偏光纤对轴中的同轴度调节 [J].光学精密工程,2014,22(1):125- 131.
ZHANGWei,WANGLe-feng,RONGWei-bin,etal.CoaxialadjustmentinPMFalignments[J].OpticsandPrecisionEngineering,2014,22(1):125- 131.
[13]宋志佗.光纤带光纤接头损耗的探讨 [J].光纤与电缆及其应用技术,2007(4):24- 26.
SONGZhi-tuo.Discussiononthesplicelossofopticalfiberribbon[J].OpticalFiber&ElectricCableandTheirApplications,2007(4):24- 26.
[14]WANGZJ,HUANGXD.Visualpositioningmethodofprintedcircuitboardsbasedonspatialmoments[J].OpticalEngineering,2014,53(3):1709- 1717.
[15]钟秦.基于图像不变矩特征和BP神经网络的车型分类 [J].华南理工大学学报(自然科学版),2009,37(2):87- 91.
ZHONGQin.VehicleclassificationbasedonimagemomentinvariantfeatureandBPneuralnetwork[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2009,37(2):87- 91.
收稿日期:2015- 07- 20
*基金项目:国家公派出国留学基金资助项目(201506155012);广东省自然科学基金研究团队项目(S2013030013355)
Foundation items: Supported by the State Scholarship Fund of China(201506155012) and the Research Team Project of the Natural Science Foundation of Guangdong Province(S2013030013355)
作者简介:陈忠(1968-),男,博士,副教授,主要从事机器视觉及其应用、精密测量和故障诊断研究.E-mail:mezhchen@scut.edu.cn
文章编号:1000- 565X(2016)05- 0117- 06
中图分类号:TP393
doi:10.3969/j.issn.1000-565X.2016.05.018
FastExtractionofFeaturePointsforContoursofOpticalFiberCoresBasedonImprovedSpatialMomentAlgorithm
CHEN ZhongZHOU De-wenZHANG Xian-min
(SchoolofMechanicalandAutomotiveEngineering,SouthChinaUniversityofTechnology,Guangzhou510640,Guangdong,China)
Abstract:In order to improve the speed and accuracy of vision-based feature point extraction for optical fibers in their precision alignment process,a rapid extraction algorithm of subpixel feature points for contours of optical fiber cores is proposed on the basis of an improved spatial moment algorithm.In the proposed algorithm,firstly,the initial position of optical fibers is quickly searched,and the pixel-level edges of fiber cores are extracted via tracking the cores and their end faces.Then,subpixel edges are located by means of an improved spatial moment method,and linear equations of the axle and the edges are derived after a linear fitting on the extracted subpixel edges.Experimental results show that the proposed extraction algorithm runs more rapidly and possesses higher precision and stronger noise robustness than the traditional method,and that it meets the requirements of real-time precision alignment of optical fibers.
Key words:computer vision;feature extraction;one-dimension spatial moment;optical fiber