基于虚拟参考反馈校正法的内模控制方法*
2016-07-19唐小军王道波王寅蒋琬玥
唐小军 王道波 王寅 蒋琬玥
(1.南京航空航天大学 自动化学院, 江苏 南京 210016; 2.南京航空航天大学 航天学院, 江苏 南京 210016)
基于虚拟参考反馈校正法的内模控制方法*
唐小军1王道波1王寅2蒋琬玥1
(1.南京航空航天大学 自动化学院, 江苏 南京 210016; 2.南京航空航天大学 航天学院, 江苏 南京 210016)
摘要:在系统对象与内部模型误差较大时,内模控制依靠滤波器系数的调整去整定控制器参数,这会牺牲系统的快速性.为解决该问题,文中提出了基于虚拟参考反馈校正法(VRFT)的内模控制方法,同步实现了过程模型的辨识与内模控制器的设计.文中首先建立了内模控制与VRFT的联系;然后基于VRFT对内模控制器进行设计,推导出合理滤波器的具体表达式,利用此滤波器对控制器参数及内部模型参数进行优化,从而使设计的整个内模控制结构与给定的理想传递函数性能一致.仿真实验结果表明,虽然文中所提方法与传统内模控制器设计方法的控制效果比较接近,但前者具有更快的响应速度及更好的跟踪性能,说明文中所提控制方法是有效的.
关键词:内模控制;内部模型;滤波器;虚拟参考反馈校正法;优化
内模控制[1]自1982年被提出以来,因其跟踪性能好、鲁棒性强、设计简单以及能消除不可测干扰等优点而受到了国内外众多学者的关注,并广泛应用于工业控制中.它与常规反馈控制的区别在于:其控制结构包含有内部模型,使得系统的鲁棒性能与标称性能可独立设计分析,并且对标称性能的分析和设计实际上等价于一个开环控制问题,系统的鲁棒性则通过滤波环节设计.其后,众多学者对内模控制相关理论作了进一步推广[2- 3].文献[4]研究了控制器内部模型的在线自适应更新以保证系统稳定性.文献[5]对内模控制和比例积分微分(PID)控制的关系进行了完整的阐述.文献[6]使用神经网络去逼近系统的过程模型及控制器.内模控制方法虽然具有比较强的鲁棒性,但当对象与模型之间的误差较大时,过度依靠辨识内部模型及滤波器系数的调整去设计控制器参数的代价就是牺牲了系统快速性以及增加了设计的复杂性.为解决这个问题,在保持内模控制器结构不变的条件下,可以采用虚拟参考反馈校正法(VRFT)对内模控制器参数及系统的内部模型进行同步辨识,使得参考信号到输出信号的传递函数等于理想传递函数的同时,过程模型始终与系统对象保持一致,控制性能逼近理想性能.
VRFT属于一类基于数据驱动的控制方法,它利用观测数据直接设计控制器以避免系统建模过程,将模型参考控制问题转化为控制器未知参数矢量的辨识求解问题.VRFT方法是由Guardabassi等[7]率先提出,Campi等[8- 10]在其基础上进行完善,为考虑灵敏度函数设计了二自由度的控制器,并应用于活动悬浮系统的Benchmark,且分析了具有特殊结构的非线性系统的VRFT控制器设计.文献[11- 12]针对慢时变的化工过程,提出了自适应VRFT.文献[13- 15]对闭环系统的二自由度控制器采用VRFT进行了设计.文献[16]从优化角度分析了两类未知参数的非线性迭代求解.文献[17]将VRFT应用于无模型自适应控制.与控制器的直接逆控制方法相比,VRFT采用了闭环控制,对扰动及模型不确定性有更好的适应能力,而不同于内模控制的是无需辨识被控对象模型.
为避免控制器设计的复杂性,可同步辨识内部模型参数和内模控制器参数,文中提出了基于VRFT的内模控制方法.首先建立了内模控制与VRFT的联系,然后将VRFT应用于内模控制器的设计,推导出滤波器的具体表达式,并利用此滤波器对控制器参数及内部模型参数进行优化,使设计的整个内模控制结构与给定的理想传递函数性能一致.
1内模控制

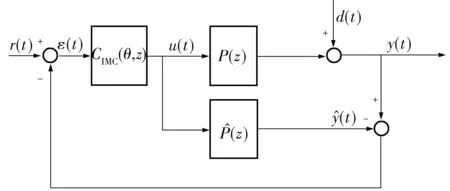
图1 内模控制结构
(1)
式中: α(z)=[α1(z),α2(z),…,αn(z)]T, β(z)=[β1(z),
β2(z),…,βn(z)]T,为两个已知的基函数矢量;θ=[θ1,θ2,…,θn]T,η=[η1,η2,…,ηn]T,分别为内模控制器及内部模型的n维未知参数矢量.系统的输出与输入可表示为
(2)

(3)
在闭环控制系统中,可采用模型参考控制方法来设计内模控制器CIMC(θ,z),目的是使由r(t)到y(t)的整个闭环系统可等价为一个期望的传递函数M(z).在扰动信号d(t)=0时,内模控制器C(z,θ)的设计等价为求解如下的优化问题:


(4)
式中,需要系统P(z)的具体数学表达式才可以优化求解未知参数矢量对(θ,η).因此,可考虑结合VRFT以避免P(z)的繁琐建模.
2虚拟参考信号设计

图2 虚拟参考输入信号构造示意图
由图2可知控制器的输出为

(5)
(6)
(7)
3VRFT与内模控制的等价性

(8)
取一阶滤波器为
则在模型匹配时由内模控制原理可以得到:
(9)
此时系统的闭环传递函数等于一个理想的传递函数,即
(10)
另一方面,传统反馈控制器与内模控制器之间有如下关系式:
(11)
(12)
而采用虚拟参考反馈校正方法整定得到的理想控制器为
(13)
比较式(12)与(13)发现,两种控制方法设计的理想控制器完全一致,从而可知内模控制与虚拟参考校正法之间的等价性.
4基于VRFT的内模控制


(14)
(15)
(16)

(2)为建立式(4)与(16)的等价性,需要选取合适的滤波器L(z)对系统的输入信号u(t)与输出信号y(t)进行滤波,即
得到滤波后的参考跟踪误差为

(3)优化求解指标函数
(17)
将模型参数控制方法的指标函数式(4)写成频域表达式:
(18)

(19)
利用式(19)可得到:
(20)
将式(20)代入式(18),得到:
(21)
(22)
利用巴塞伐尔定理可得:

(23)
式中,φu(ω)为输入观测数据u(t)的功率谱密度.对式(23)进一步整理,可得:

(24)
对比式(21)与(24)可知,要使优化问题式(4)与式(16)等价,则可选择滤波器为
(25)

(26)
由于φu(ω)可由输入数据u(t)得到固定值,以及M(z)是给定的,故式(25)的滤波器为一固定滤波器.
5稳定性检验
若控制器不仅可以控制系统的标称模型,而且在模型不确定性的情形下同样有控制效果,则这个控制系统具有鲁棒稳定性.
(27)
当且仅当
(28)
时,图1所示的内模控制系统是稳定的.
(29)
由于基于数据驱动的控制方法绕开系统建模,直接利用数据去设计控制器,没有系统的标称模型,因此很难找到具有系统稳定性的控制器.以往在解决系统的稳定性问题时,都是在频域中增加一些约束条件来优化设计控制器,但同时也增加了优化过程的复杂度.尽管在系统运行前没有获取标称模型,但可利用获取的数据去测试控制器的系统稳定性.利用式(29)去逼近上界函数lm(ω),由于系统
6仿真算例
实例1对于未知线性系统
采用如下参数线性化的控制器:
C(θ)=αT(z)θ=
选取期望的闭环传递函数为

仿真实验中采用幅值为1的三角波作为输入激励信号,观测噪声d(t)选用零均值白噪声,采集实际被控系统两侧的数据对{u(t),y(t)}t=1,2,…,1 000.对控制器中参数使用可分离非线性最小二乘算法进行迭代求解,选取初始参数值为θ=[0.5,0.1,0,0,0]T,实验结果图3所示.
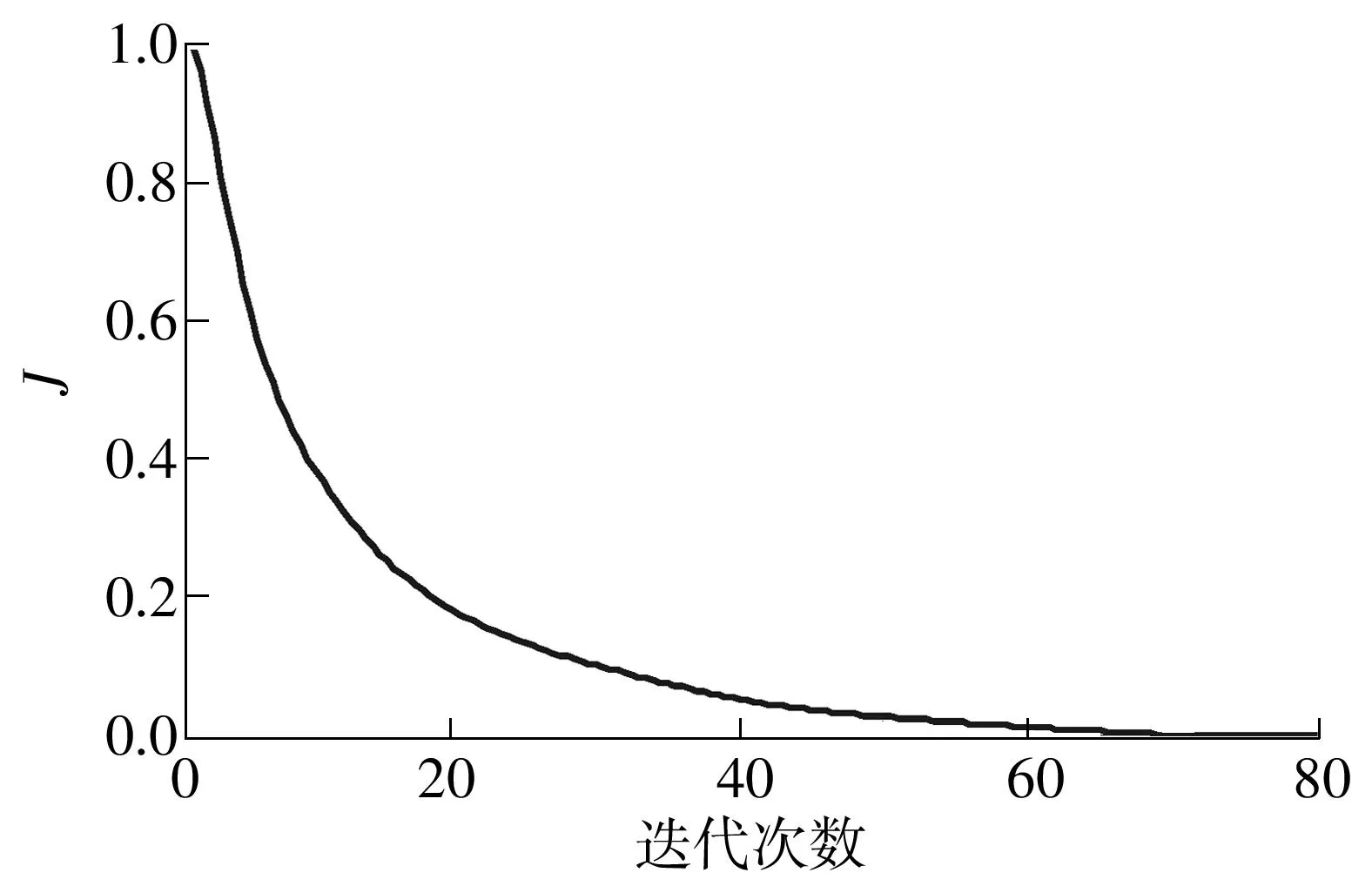
图3 性能指标变化曲线
从图3中可知,当算法迭代70次左右时,其性能指标逼近0,迭代结束,此时的参数估计值为控制器及参数化过程模型参数的最终确定值.
为进一步检验文中基于虚拟参考反馈校正法的内模控制效果,给闭环系统施加一个阶跃参考输入信号激励,并在仿真到第40秒时再施加一个幅值为0.5的阶跃扰动,与常规内模控制的比较结果如图4所示,基于虚拟参考反馈校正法的内模控制方法的控制效果优于常规内模控制方法,跟踪性能更强,系统的抗干扰性也得以提高,这是由于常规内模控制需要依靠滤波器系数去调整控制器参数,这种试调方法并不完全精确,而文中方法给出了滤波器的明确表达式,利用此滤波器可以使控制器参数和内部模型的参数设计基本上达到最优,从而使设计的整个内模控制结构与给定的理想传递函数性能一致.实例2以实际中简单的单链接机器手为控制对象,其非线性动态特性为
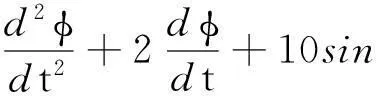
(30)
式中,φ为转角,u为力矩,均是关于时间t的函数.输入信号u(t)=8sin(0.5t)sint对控制对象进行激励,采集得到500个输入输出数据对,选取系统的参考模型为
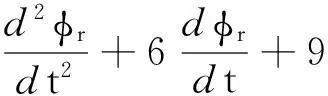
(31)
式中,φr为模型输出,r为指令.采用文中所提方法设计控制器,将其控制效果与传统内模控制器设计方法进行了比较,结果如图5所示.从图中可以看出,两种方法的控制效果虽然比较接近,但文中所提方法具有更快的响应速度及更好的跟踪性能,这是因为文中所提方法在设计过程中对控制器参数及内部模型参数进行了优化,说明文中所提方法具有更好的控制效果.
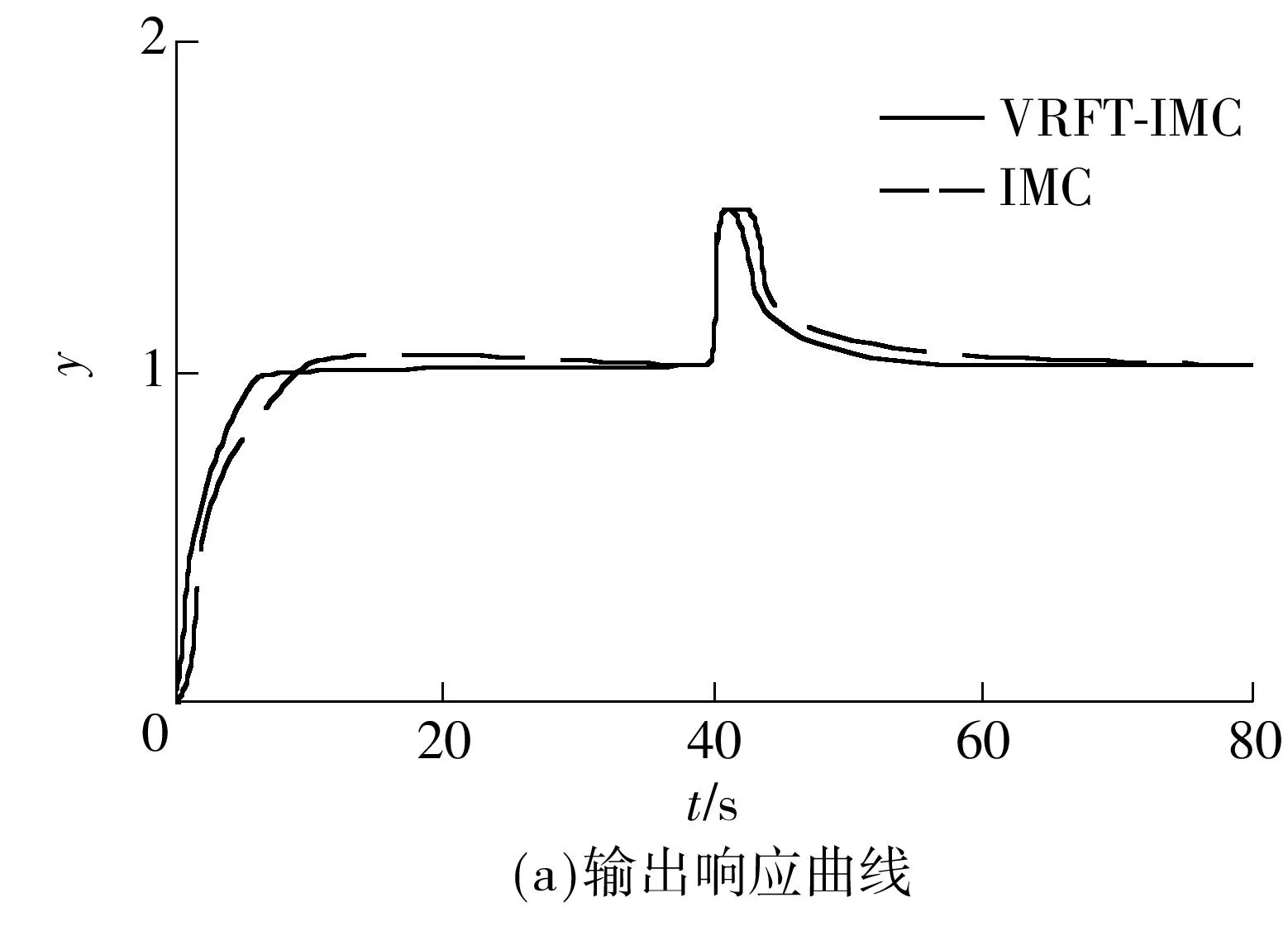
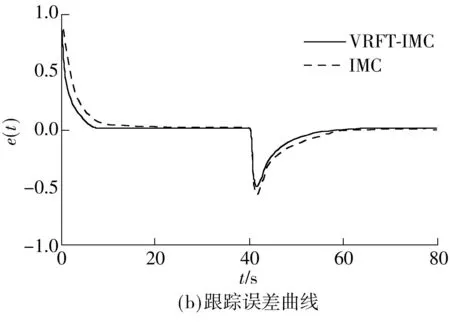
图4 VRFT-IMC与IMC的输出响应曲线和跟踪误差曲线
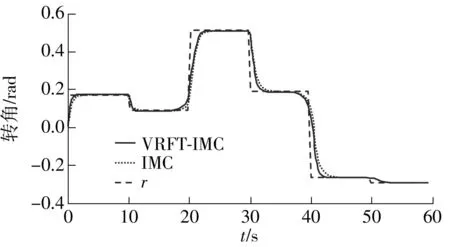
图5 两种方法的控制效果比较
7结论
在内模控制中,当系统对象与内部模型的误差较大时,过度依靠辨识内部模型及滤波器系数的调整去设计控制器参数,会牺牲系统的快速性.为同步辨识估计同时存在的内部模型参数和内模控制器参数,文中将虚拟参考反馈校正理论应用于内模控制,采用非线性最小二乘法辨识求解未知参数矢量,推导出滤波器的具体表达式并对数据进行滤波,使得参考信号到输出信号的传递函数等于理想传递函数的同时,内部模型始终与系统对象保持一致,控制性能逼近理想性能.仿真实验结果表明,文中所提方法的响应速度及跟踪性能优于传统的内模控制方法.
参考文献:
[1]GARCIACE,MORARIM.Internalmodelcontrol:aunifyingreviewandsomenewresults[J].IndustrialandEngineeringChemistry,1982,21(2):308- 323.
[2]WANGT,GANWS.StochasticanalysisofFXLMS-basedinternalmodelcontrolfeedbackactivenoisecontrolsystems[J].SignalProcessing,2014,101(4):121- 133.[3]JINQ,JIANGB,WANGQ,etal.Decouplinginternalmodelcontrolfornon-squareprocessesbasedonequivalenttransferfunction[J].TransactionsoftheInstituteofMeasurement&Control,2014,36:1114- 1131.[4]DATTAA,OCHOAJ.Adaptiveinternalmodelcontrol:designandstabilityanalysis[J].Automatica,1996,32(2):261- 266.[5]RIVERADE,MORARIM,SKOGESTADS.Internalmodelcontrol:PIDcontrollerdesign[J].IndustrialandEnginee-ringChemistryProcessDesignandDevelopment,1986,6(1):2163.[6]AOYAMAA,VENKATASUBRAMANIANA.Internalmodelcontrolframeworkusingneuralnetworksforthemodelingandcontrolofabioreactor[J].EngineeringApplicationsofArtificialIntelligence,1995,8(6):689- 701.[7]GUARDABASSIGO,SAVARESISM.Virtualreferencedirectdesignmethod:anoff-lineapproachtodata-basedcontrolsystemdesign[J].IEEETransactionsonAutomaticControl,2002,45(5):954- 959.
[8]CAMPIMC,LECCHINIA,SAVARESISM.Virtualre-ferencefeedbacktuning:adirectmethodforthedesignoffeedbackcontrolllers[J].Automatica,2002,38(8):1337- 1346.[9]CAMPIMC,LECHINIA,SAVARESISM.AnapplicationofthevirtualreferencefeedbacktuningmethodtoaBenchmarkproblem[J].EuropeanJournalofControl,2003,9(1):66- 76.
[10]CAMPIMC,SAVARESISM.Directnonlinearcontroldesign:thevirtualreferencefeedbacktuningapproach[J].IEEETransactionsonAutomaticControl,2006,51(1):14- 27.
[11]KANSHAAY,HASHIMOTOBY,CHIUMS.NewresultsonVRFTdesignofPIDcontroller[J].ChemicalEngineeringResearchandDesign,2008,86(8):925- 931.
[12]YANGX,LIY,KANSHAY,etal.EnhancedVRFTdesignofadaptivePIDcontroller[J].ChemicalEnginee-ringScience,2012,76(28):66- 72.
[13]王建宏,朱永红,肖绚.约束闭环系统的虚拟参考反馈校正控制 [J].上海交通大学学报,2012,46(9):1398- 1405.WANGJian-hong,ZHUYong-hong,XIAOXuan.Virtualreferencefeedbacktuningcontrolforcontrainedclosed-loopsystem[J].JournalofShanghaiJiaotongUniversity,2012,46(9):1398- 1405.
[14]唐得志,王道波,王建宏,等.闭环系统的虚拟参考反馈校正控制设计 [J].华中科技大学学报(自然科学版),2011,39(2):48- 52.
TANGDe-zhi,WANGDao-bo,WANGJian-hong,etal.Virtualreferencefeedbacktuningcontroldesignforclosed-loopsystem[J].JournalofHuazhongUniversity(NaturalScienceEdition),2011,39(2):48- 52.
[15]唐小军,王道波,唐得志,等.虚拟参考反馈校正控制器参数的预测误差辨识 [J].华南理工大学学报(自然科学版),2013,41(5):15- 21.
TANGXiao-jun,WANGDao-bo,TANGDe-zhi,etal.Predictionerroridentificationofcontrollerparametersinvirtualreferencefeedbacktuning[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2013,41(5):15- 21.
[16]BOYDS,VANDENBERGHEL.Convexoptimization[M].Cambridge:CambridgeUniversityPress,2008:1- 16.[17]金尚泰,赵汝莉,侯忠生,等.基于虚拟参考反馈整定的改进无模型自适应控制 [J].控制与决策,2015,30(12):2175- 2180.
JINShang-tai,ZHAORu-li,HOUZhong-sheng,etal.Improvedmodelfreeadaptivecontrolapproachwithvirtualreferencefeedbacktuning[J].ControlandDecision,2015,30(12):2175- 2180.
[18]JUNGL.Theoryandpracticeofrecursiveidentification[M].Cambridge:MITPress,1983:96- 98.
收稿日期:2015- 09- 21
*基金项目:国家自然科学基金资助项目(61374188)
Foundation item:Supported by the National Natural Science Foundation of China(61374188)
作者简介:唐小军(1978-),男,博士生,主要从事自适应控制研究.E-mail:tangxiaojun1978@163.com
文章编号:1000- 565X(2016)05- 0066- 07
中图分类号:TP 273
doi:10.3969/j.issn.1000-565X.2016.05.010
InternalModelControlMethodBasedonVirtualReferenceFeedbackTuning
TANG Xiao-jun1WANG Dao-bo1WANG Yin2JIANG Wan-yue1
(1.CollegeofAutomationEngineering,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,Jiangsu,China;2.CollegeofAstronautics,NanjingUniversityofAeronauticsandAstronautics,Nanjing210016,Jiangsu,China)
Abstract:During the internal model control in the existence of great difference between real model and internal model,the adjustment of filter coefficient for controller parameter determination may result in the decrease of system's response speed.In order to solve this problem,an internal model control method on the basis of virtual reference feedback tuning(VRFT) is proposed,and the identification of the process model as well as the design of the internal model controller is implemented simultaneously.Firstly, the connection between internal model control and VRFT is established.Then,an internal model controller is designed on the basis of VRFT,and a specific expression of the reasonable filter is derived.Finally,the parameters of the controller and the internal model are optimized by using the designed filter,which makes the designed controller structure accords with the given ideal transfer function well.Simulated results show that,though the proposed method presents a control effect similar to the traditional controller design method,the former is more effective thanks to its faster response and higher tracking performance.
Key words:internal model control;internal model;filter;virtual reference feedback tuning;optimization
