实时广域差分定位系统及精度分析
2016-07-07李娟娟杨开伟
李娟娟,杨开伟
(1.中国电子科技集团公司第五十四研究所,石家庄 050081;2.河北省卫星导航技术与装备工程技术研究中心,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
实时广域差分定位系统及精度分析
李娟娟1,2,3,杨开伟1,2,3
(1.中国电子科技集团公司第五十四研究所,石家庄 050081;2.河北省卫星导航技术与装备工程技术研究中心,石家庄 050081;3.卫星导航系统与装备技术国家重点实验室,石家庄 050081)
摘要:本文介绍了实时广域差分定位系统的组成与原理,基于开发的实时广域差分定位处理软件和高精度接收机,组成实时广域差分系统。通过接收国际全球定位系统服务机构提供的服务产品,进行了静态测试实验和动态测试实验,并对系统精度进行分析评估。
关键词:实时广域差分;高精度定位;卫星轨道;卫星钟差;精度分析
1 引言
随着卫星导航技术的发展以及导航定位用户需求的发展,高精度、实时性、低成本成为卫星导航用户需求的发展趋势。利用广播星历进行单点定位,虽然能够满足实时性、低成本的需求,但是无法实现高精度定位。而通过地面增强(单站增强或组网增强)的手段为用户提供高精度服务,实现了高精度、实时性,但是由于需要组建增强系统而不具备低成本的优势。本文利用IGS(国际GPS服务)实时产品,通过自研GPS接收机以及广域差分定位软件实现,建立实时广域差分定位系统,并对其性能进行测试实验。
2 系统组成与原理
实时广域差分定位系统主要由天线、GPS接收机、处理计算机(含广域差分定位软件)等设备组成组成,并通过网络接入IGS产品。设备组成与连接关系如图1所示,处理计算机上运行自己开发的实时广域差分定位软件,软件运行界面如图2所示。

图1 实时广域差分系统组成图

图2 实时广域差分定位软件界面
实时广域差分定位系统的基本原理为:GNSS接收机进行导航信号观测,生成伪距观测值并解析导航电文,并将观测值和导航电文实时传输给处理计算机;处理计算机运行的广域差分定位软件接收来自接收机上报的观测数据的同时,通过网络实时获取得到IGS卫星轨道和钟差改正数;广域差分定位软件读取事先下载的电离层格网改正文件,获取电离层改正信息;利用观测值、轨道钟差改正信息和电离层改正信息进行广域差分定位解算,得到点位坐标。
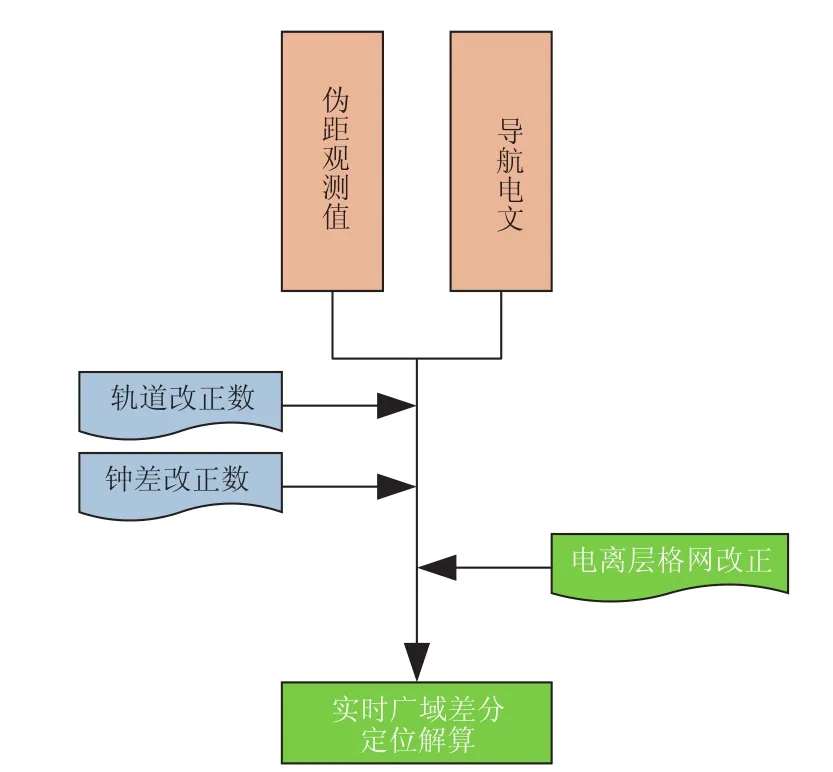
图3 实时广域差分处理流程图
3 实时改正数据产品
实时广域差分用到的IGS实时产品主要为轨道改正和钟差改正,其播发格式为RTCM-SSR,其中,轨道和钟差改正数的电文类型为1060,分为数据流标识和数据记录两部分[2]。
3.1 轨道改正
实时产品中轨道信息是对广播星历算出来的卫星轨道星固系下径向、切向和法向的修正值,因此,要将该项改正加入到广播星历中去,再和IGS数据进行对比,就需要将IGS星历数据和广播星历计算出的卫星轨道转化到星固系下的径向、切向和法向上去[3][4][5]。由卫星位置和速度计算出卫星轨道在径向、切向和法向的单位向量。

则可以实现由地固系转到星固系


3.2 钟差改正
实时钟差也是对广播星历算出的钟差的修正值。具体见下式[3][4]

4 系统精度分析
为了对实时广域差分定位系统的性能进行评估,分别进行了多组动态定位与静态定位试验。试验采用GPS L1伪距观测值,卫星轨道与钟差改正信息从IGS发布机构实时获取,电离层格网事先从IGS网站下载。试验情况分别如下。
4.1 静态定位精度分析
实时广域差分定位系统的静态定位精度分析试验是将接收机天线安装在已知点位上,设置接收机采样率为1Hz,处理软件进行实时定位处理,并将实时广域差分定位结果与已知点坐标进行比对分析,评估系统的静态定位精度水平。试验数据与结果如图4到图6所示。

图4 实时广域差分北方向定位误差

图5 实时广域差分东方向定位误差
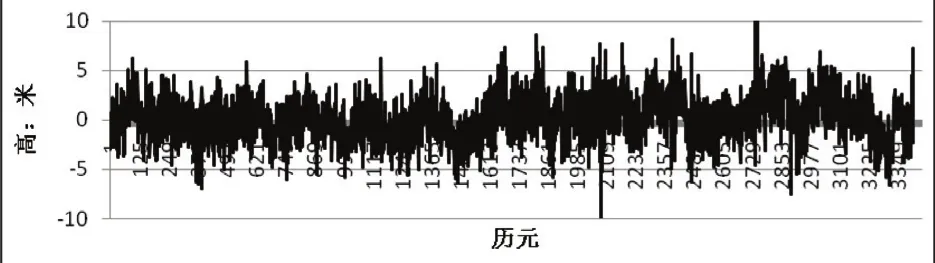
图6 实时广域差分高程定位误差
将广域差分定位结果与真实坐标进行对比,并换算得到北东高三个方向的误差值序列,经统计得到实时广域差分系统静态定位精度为:平面1.159m (RMS),高程2.862m(RMS)。
4.2 动态定位精度分析
实时广域差分定位系统的动态定位精度分析试验中,分别搭建广域差分定位系统和RTK平台,其中,RTK平台的基准站安装在已知基准点上,RTK流动站和广域差分定位系统的接收机均安装在测试车上且采用同一天线进行功分,基准站与流动站距离为2km~3km。接收机采样率均为1Hz,由于RTK定位精度为厘米级,可以作为广域差分定位结果的参考值,将实时广域差分定位结果与RTK定位进行比对分析,评估系统的动态定位精度水平。试验数据与结果如图7所示。

图7 实时广域差分动态定位结果
将广域差分定位结果与RTK定位结果进行对比,以RTK定位结果为真值,并换算得到北东高三个方向的误差值序列,经统计得到实时广域差分系统动态定位精度为:平面1.665m(RMS),高程3.427m(RMS)。
5 结束语
通过对实时广域差分定位系统的研制,并分别对系统进行静态与动态测试实验,结果表明:实时广域差分定位系统的定位精度可以达到水平优于2m,垂直优于3m,动态测试时垂直精度比静态测试稍差一点,优于3.5m。此外,相对于其他导航型以及高精度测量设备,实时广域差分定位系统具有高精度、实时性、低成本、设备简单等特点,随着我国北斗卫星定位系统的发展,也将有更广泛的应用前景。■
参考文献
[1] Ken MacLeod and Mark Caissy. Real time IGS pilot project(RT-PP)status report [R]. IGS Workshop, Newcastle UK, June 28, 2010.
[2] 时小飞,高成发,潘树国等.全球定位系统实时服务数据的精度分析[J]·导航定位学报,2013 (4)
[3] 楼益栋.导航卫星实时精密轨道与钟差确定[D].武汉:武汉大学,2008
[4] 尹倩倩,楼益栋,易文婷.IGS实时产品比较与分析[J].武汉大学学报:信息科学版,2009, 34(5)
[5] 高成发,胡伍生.卫星导航定位原理与应用[M].北京:人民交通出版社,2011[4]Bruckmannn&KreyeuborgGranuliertechnikGmbH. BKGNtrip Client(BNC) Version 2.8 Manual[EB/OL].[2013-05-21]
Real Time Wide Area Differential Positioning System and Precision Analysis
Li Juanjuan1,2,3,Yang Kaiwei1,2,3
(1. The 54th Research Institute of CETC, Shijiazhuang, 050081; 2. Satellite Navigation Technology and Equipment Engineering Technology Research Center of Hebei province, Shijiazhuang, 050081; 3. State Key Laboratory of Satellite Navigation System and Equipment Technology, Shijiazhuang, 050081)
Abstract:This paper introduces the composition and principle of the real time wide area differential positioning system, based on the development of the real time wide area differential positioning processing software and the high precision receiver, which is composed of the real time wide area difference system. Static testing and dynamic testing are carried out by receiving the service products which are provided by the global positioning system.
Keywords:real time wide area difference; high precision positioning; satellite orbit; satellite clock error;accuracy analysis
doi:10.3969/J.ISSN.1672-7274.2016.06.002
中图分类号:TN96
文献标识码:A 文章编码:1672-7274(2016)06-0004-03