基于无人机倾斜摄影技术测绘大比例尺地形图的可行性研究
2017-03-25孙亮夏永华
孙亮++夏永华


摘要: 随着无人机技术的发展,无人机倾斜摄影技术在数字城市建设和应急救灾中得到了广泛的应用。本文提出了一种基于无人机倾斜摄影技术所获得的数字三维模型测绘大比例尺地形图的方法,探讨了倾斜摄影的关键技术,总结了基于无人机倾斜摄影生产三维模型和测绘地形图的流程,实例验证了基于无人机倾斜摄影测量生成的三维模型测绘大比例尺地形图的可行性,并且做了相应的精度分析,在实际生产中有一定的指导意义。
Abstract: With the development of UAV technology, UAV oblique photography technology has been widely used in digital city construction and emergency relief. This paper presents a method of mapping large-scale topographic maps based on digital three-dimensional model obtained by oblique photography of UAV, discusses the key techniques of oblique photography, summarizes the process of producing 3D model and mapping topographic map based on UAV oblique photography, verifies the feasibility of large-scale topographic mapping based on 3D model generated by oblique photogrammetry of UAV, and makes the corresponding precision analysis, and in practical production it has certain guiding significance.
关键词: 无人机;倾斜摄影测量;大比例尺地形圖;Smart3D;精度分析
Key words: UAV;oblique photogrammetry;large-scale topographic map;Smart3D;accuracy analysis
中图分类号:P231.5 文献标识码:A 文章编号:1006-4311(2017)08-0209-04
0 引言
随着我国经济的日益发展,数字化城市的建设步伐日益加快,各领域都离不开空间地理信息的支持,尤其对大比例尺地形图的快速获取和更新有着迫切的需求。传统测绘地形图的方法普遍存在着作业效率低、出图时间长、成本高的缺点,需要外业工作人员到实地作业,没有安全保障的缺点。基于卫星遥感摄影测量测绘地形图受到气象、地貌条件的限制[1]。目前已经发射的高分辨率卫星影像分辨率已经达到了约0.5m,但是仍然难以满足1:500-1:2000这种大比例尺的成图要求。此外,传统航空摄影测量测绘地形图,对空域、机场和天气条件有着严格的要求,存在着成本高,作业周期长的缺点,限制了数字摄影测量技术在大比例尺地形测绘中应用[2]。
随着无人机技术的发展,无人机垂直摄影技术和倾斜摄影技术得到了广泛的应用。与无人机垂直摄影相比,无人机倾斜摄影技术可以获得多角度高分率影像,可生成数字三维模型,在数字城市建设、城市管理和应急救灾中得到了广泛的应用[3-5]。经过数据处理得到的数字三维模型是可量测的,可直接在三维模型上进行量测地形图。与传统垂直摄影技术相比,避免了戴立体观测眼镜进行测图的方法。在小范围测图时,具有一定的实际应用价值和意义。
1 倾斜摄影原理
无人机倾斜摄影技术是通过在无人机飞行平台上搭载多台数码相机,同时从垂直和倾斜多个不同的角度采集高分辨率影像,一般常用的是五镜头倾斜摄影系统,结合无人飞行平台搭载的GPS/IMU系统获取的POS数据和像控点数据,经过相关软件处理获取数字表面模型、数字正摄影像和三维模型的摄影测量技术。
2 无人机倾斜摄影测量关键技术
2.1 多视影像联合平差
无人机倾斜摄影采集到的影像包含垂直摄影影像和倾斜摄影影像。针对倾斜摄影测量,目前倾斜影像区域网平差主要分为:无约束区域网平差、附加约束的区域网平差和倾斜影像的直接定向。
2.2 多视影像密集匹配
与传统的垂直摄影影像相比,倾斜影像具有地物几何变形大、分辨率变化大的问题[6]。使传统的基于灰度和特征的匹配方法不能更好的完成匹配工作,难以获取建模需要的同名点,为了更好的解决倾斜摄影的匹配问题,一些专家学者提出了基于多视角倾斜影像的密集匹配技术,并做了大量的研究[7-10],通过倾斜影像的密集匹配,可以得到高精度和高密度的点云数据,是实现精细三维建模的关键流程。目前,常用的密集匹配算法有共线条件约束的多片最小二乘影像匹配算法、多基元多影像匹配算法、基于物方的多视立体匹配算法[11]。
2.3 三维模型生产
将倾斜摄影获取的影像经过预处理后,便可以进行三维模型的生产。基于倾斜摄影所得影像数据的利用方式可以将所得到的三维模型分为两种方式:单独利用倾斜像片作为纹理生产的三维模型和完全基于倾斜摄影所得数据并利用相关软件获得的三维模型。
3 基于倾斜摄影生成三维模型测绘地形图的流程
基于无人机倾斜摄影生成三维模型测绘地形图主要包括:任务下达与申请空域、外业航飞数据采集、像控点布设与量测、内业空中三角测量、生成三维模型和制作地形图几个部分,具体技术流程见图1所示。
4 实验数据获取
4.1 测区概况
实验测区位于云南省安宁市,安宁市地处昆明西郊,距离昆明主城区28km。位于东经102°8′-102°37′和北纬24°31′-25°6′之间。安宁地形呈东南高、西北低,有八街、连然、禄脿3个山间盆地,其余为山区半山区。市内最高点海拔2617.7m,最低点海拔1680m。
4.2 外业数据获取
本次实验采用八旋翼型无人机系统,主要包括八旋翼型无人机飞行平台、地面监控站、五镜头倾斜相机和遥控设备,系统构成如图2所示。八旋翼飞行平台主要有动力系统、机身主体、飞行控制系统和一些辅助设备组成。该机型搭载3块锂电池,具有续航时间长,姿态稳的特点。
本次试验外业航飞数据采集一共飞行了一个架次,规划了8条航带,相对航高设计为280m,航向重叠度为75%,旁向重叠度为75%,五个镜头一共拍摄了465张照片。
4.3 内业数据处理
在外业航飞结束后,进行内业数据处理,无人机倾斜摄影数据内业处理主要包括数据预处理、空中三角测量和生成三维模型几步。
4.3.1 数据预处理
在得到航飞数据后,首先检查影像和POS是否一一对应,然后检查影像质量问题,是否清晰,有无大范围的模糊遮挡现象。由于倾斜摄影相机有一个镜头垂直朝下,另四个分别向四个方向。在摄影的过程中,5个相机所拍摄的角度和时间不一致,就会出现光线反差、强度等的差异,将影响到三维建模的精度和效果,所以需要对影像进行匀光匀色处理[12]。最后,所获得的POS数据一般是WGS84坐标系,需要根据项目需求,进行坐标系的转换工作。
4.3.2 空中三测量
Smart3DCapture首先对一个垂直镜头和四个倾斜镜头所得到的影像进行连接点自动匹配,对获取的特征点采用多像密集匹配技术自动匹配同名点,然后进行粗点检测,构建自由网,输入像控点坐标,进行刺点后进行光束法区域网平差,根据平差结果进行反复调整,包括参数设置、像控点刺点位置调整,直到空三结果满足所需要求,最后输出空三结果报告,实现倾斜摄影影像的空三解算。在Smart3DCapture中具体的操作流程如下:
①POS數据准备: 无人机航飞采集后获得POS数据,针对无人机采集的POS数据不精确,在Smart3DCapture建模中一般只采用GPS数据作为初始值。在建模任务开始前,需要将POS数据整理成为Smart3DCapture能认可的格式。
②打开Smart3DCapture Master,创建一个新工程,在新建工程内建立一个块,将上步已经准备好的POS表格加载到工程中,加载完成后,视图中间偏右位置 3D View可以查看到空间效果。由于无人机POS 数据一般只使用GPS坐标值,不使用姿态角数据,故显示为黄色点,可以通过预览图对飞行的质量进行初步的判断。
③相对空三解算,Smart3DCapture Master在没有添加像控点或没有像控点就可以进行空三解算,自动匹配同名点,恢复像片之间的相对位置关系,经过相对空三解算后,可以预测像控点位置,可以很大程度上提高像控点刺点效率。
④量测控制点,选择Control points菜单编辑控制点,在控制点的编辑过程中,先选择成果所需的空间参考,输入控制点信息,并在每个控制点下添加对应的影像并标注控制点所在具体位置,保存控制点信息。
⑤刺像控点,对照外业像控点点志记,将像控点刺在精确的位置。为了方便快速刺好像控点,可以先刺部分测区四周几个像控点,然后进行空三解算,在此基础上,可以更好的预测其余像控点的位置,进一步提高像控点刺点效率。
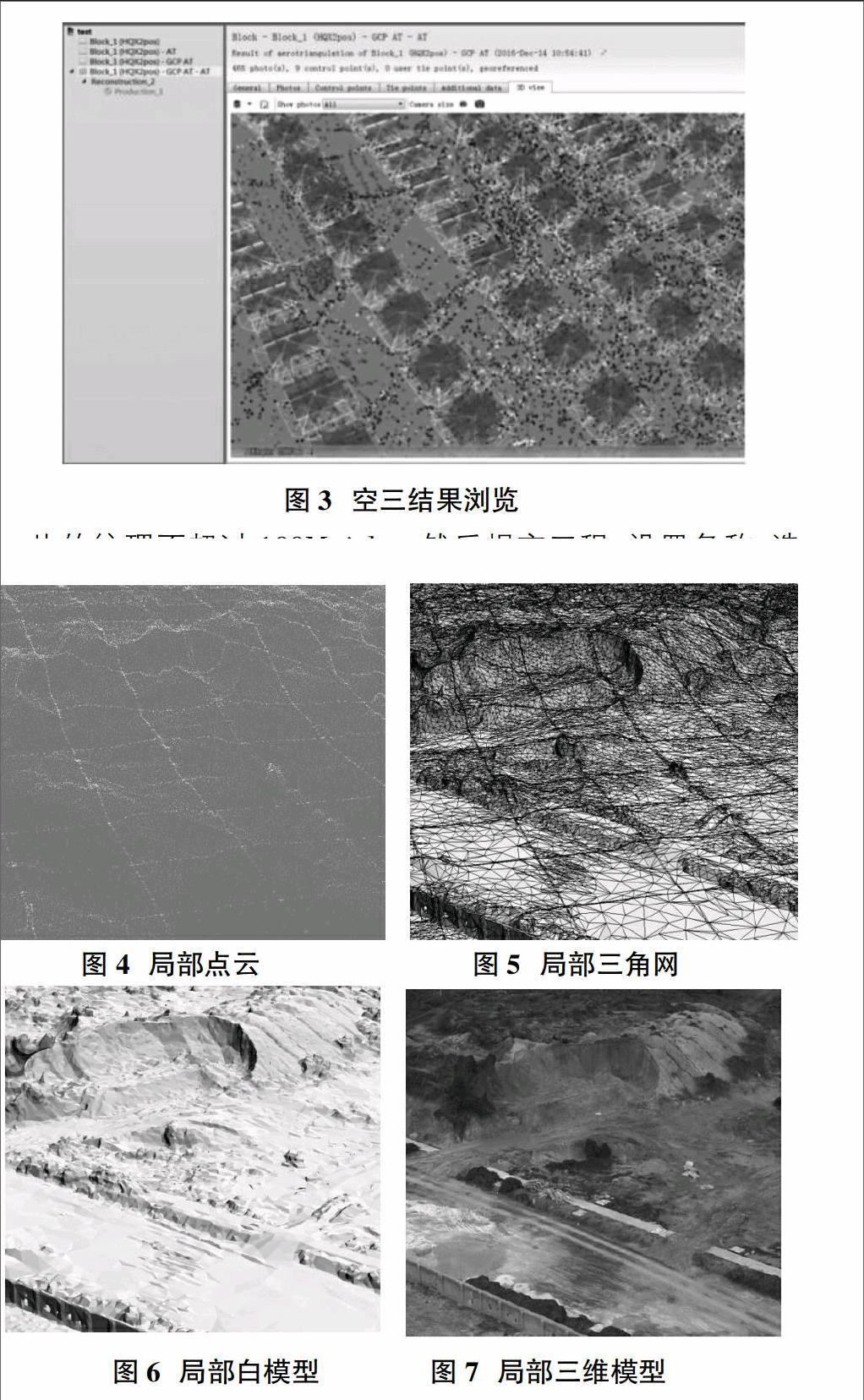
⑥绝对空三解算, 在刺好所有像控点后,进行绝对空三处理,在General 菜单下提交“空三”,提交后弹出“空三”定义窗口,设置块输出名称及位置参考等信息便可提交运行。提交完成后,会自动计算,计算过程中不能进行任何操作。运行结束后,可通过3D View菜单查看形成的“空三”关系模型,包括相机曝光点的位置信息等,见图3所示。
4.3.3 三维模型生成
在空三精度达到所满足的精度和查看空三关系模型无明显错误后,可以进行计算三维模型,点击提交计算三维模型,设置模型的空间参考系统。Smart3DCapture系统的三维重建过程是基于瓦片技术,根据数据的大小进行分瓦,一般选择规则平面方格分瓦,分瓦大小要保证最大瓦片的纹理不超过100Mpixls。然后提交工程,设置名称,选择所需数据产品,可单独生成三维模型、三维点云和正射影像,根据需求进行选择。选择生成三维模型后可选择3mx、s3c、osgb等格式的三维模型,提交工程,完成模型的生产,打开3D viewer 查看生成模型结果。
Smart3DCapure软件基于图形运算单元GPU的快速三维场景运算软件,可运算生成基于真实影像的高密度点云[13],如图4所示,根据点云数据可以自动生成不规则三角网(TIN)数据如图5所示,生成的白膜如图6所示,自动对白膜三维模型赋予纹理,生成基于真实影像纹理的实景三维模型,如图7所示。
5 基于倾斜摄影测量三维模型的成图精度分析
为了检验基于三维模型量测地形图的可行性和精度,本次实验在试验区采用RTK技术均匀量测一些特征点,包括道路拐角、房角,墙角、井盖,沟渠等可以快速识别的特征点,以这些实地量测的检查点坐标作为已测地形图的检核点。在生成的三维模型上均匀取大量的地形地物点,将这些点导入CASS中成图,见图8所示。通过判断检查点点位中误差和高程中误差的大小是否满足测绘大比例尺地形图的规范要求,进行验证基于三维模型量测地形图的可行性和精度。
5.1 地形图平面精度检查
为了检验试验区内地形图的平面精度,一共实地量测量10个平面检查点,地形图平面检查点的平面精度统计见表1所示。
根据表1中的?驻X、?驻Y和?驻XY数据,就可以依据中误差公式求解出检查点的点位中误差m?驻XY,见公式1。
m?驻XY=■(1)
式中:n为检查点个数。
试验区内地形图的精度统计可知,检查点点位中误差为0.091m。根据《工程测量规范》(GB 50026-2007)中关于图上点位中误差为0.8mm,若按1:500比例尺,则经计算可得允许的点位中误差的限差为0.4m,可知本次试验点位中误差满足1:500比例尺的精度要求。
5.2 地形图高程精度检查
为了验证试验区内地形图检查点的高程精度,本次在实验区均匀实测25个高程检查点,通过等高线内插高程值的方法计算出实测点在被测目标区域内的图上高程,通过对比高程中误差进行高程精度分析,统计见表2所示。
根據表2中的?驻H数据,可知最大高程误差和最小高程误差,同时可以依据公式(2)求解出高程中误差M?驻H。
M?驻H=■(2)
式中:n为检查点个数。
根据式(2),计算得出本次试验的高程中误差为0.575m,最大高程误差为-0.97m,最小高程误差为-0.03m。依据《工程测量规范》(GB 50026-2007),本次试验区为丘陵,可计算出1:2000丘陵地区的高程中误差限差为1m,由此可知能满足1:2000比例尺的精度要求。
6 结束语
本文基于无人机倾斜摄影系统获得影像数据和POS数据,通过Smart3D软件进行了空中三角测量,生成了真实三维模型,利用其制作了地形图。将实地量测检查点坐标和基于三维模型生成地形图中检查点的平面坐标和高程坐标进行对比,证实了该方法生成的地形图在平面上可以满足1:500地形图的要求,在高程上可以满足1:2000地形图的要求,为实际生产地形图提供了一种新的方法。
参考文献:
[1]卢晓攀.无人机低空摄影测量成图精度实证研究[D].中国矿业大学,2014.
[2]林翔.低空数码航空摄影测量在大比例尺地形图测绘中的应用[J].科技创新导报,2011(17):142.
[3]杨永明.无人机遥感系统数据获取与处理关键技术研究[D].昆明理工大学,2016.
[4]李镇洲,张学之.基于倾斜摄影测量技术快速建立城市3维模型研究[J].测绘与空间地理信息,2012,35(4):117-119.
[5]王建强,钟春惺,江丽钧,等.基于多视航空影像的城市三维建模方法[J].测试学报,2014,39(3):70-74.
[6]王兴慧.应用于倾斜影像的点特征优化提取与宽基线匹配[D].兰州交通大学,2014.
[7]王竞雪,朱庆,王伟玺.多匹配基元集成的多视影像密集匹配方法[J].测绘学报,2013,42(5):691-698.
[8]程锟锟.多视角倾斜影像密集匹配技术研究[D].河南理工大学,2014.
[9]Zhang Li. Automatic Digital Surface Model(DSM) Generation from Linear Array Images[D].Switzerland: Swiss Federal Institute of Technology Zurich.PhD thesis,2005.
[10]袁修孝,明洋.一种综合利用像方和物方信息的多影像匹配方法[J].测绘学报,2009(3):216-222.
[11]王双亭,程锟锟,刘晓龙.一种基于多视倾斜影像的PMVS改进算法[J].河南理工大学学报(自然科学版),2015(1):59-63.
[12]张可可.无人机影像空中三角测量实验研究[J].测绘,2013(1):10-12.
[13]张骥,高钊,陈容.基于Leica RCD 30倾斜航摄仪和Smart3D技术快速进行城市三维实景生产[J].测绘技术装备,2014(3):61-64.
