不同惯导系统零速检测算法的性能分析
2016-07-07李耀宗杨伟彬
石 波,李耀宗,程 敏,杨伟彬
(山东科技大学 测绘科学与工程学院,山东 青岛 266590)
不同惯导系统零速检测算法的性能分析
石波,李耀宗,程敏,杨伟彬
(山东科技大学 测绘科学与工程学院,山东 青岛 266590)
摘要:分别使用四种零速检测算法,检验了不同精度两种惯性导航系统的检测性能,通过绘制载体速度时间图像、检测的零速折线图以及检测统计量变化曲线图,分析了车载实验下不同惯导系统相同零速检测算法之间、不同零速检测算法相同惯导系统之间各曲线变化。结果表明,相同的零速检测算法对性能较好的惯导系统检测的零速时段精度更高;而对于相同的惯导系统使用不同的零速检测算法,通过对比广义似然比检测结果和角速度量测能量检测结果发现,零速检测过程中提供最可靠信息的是陀螺信号。
关键词:惯性导航系统;阈值;Neyman-Pearson准则;零速检测;零速折线图
惯性导航是根据惯性传感器(陀螺仪、加速度计)提供的载体相对于惯性空间的线速度和角速度信息,来确定运载体位置的过程[1]。不同于其他类型的导航系统,惯性导航系统是一个完全自主的,不依赖于任何外部信息的系统,具有隐蔽性好、精度高、全天候作业、不易被电子干扰的优点,但同时也具有一些弊端,最明显的就是导航误差随时间积累问题,因而长时间工作后会产生不同程度的积累误差,此误差可以通过与一个或多个辅助传感器组合来使它达到有界,提高系统性能。相对来讲,零速修正技术(zero velocity update,ZUPT)是进行误差控制的一种简单而且有效的手段[2],是利用载体停止时惯性导航系统的速度输出作为系统速度误差的观测量,进而对其他各项误差进行修正。零速修正算法主要分为两个步骤,即零速检测和零速更新。
目前,零速修正技术在车载以及个人导航等领域都得到了广泛应用,而零速检测算法的运用也不尽相同,根据实际载体、环境等条件选择使用不同的检测算法。就目前算法来讲,主要有广义似然比检测(generalized likelihood ratio test,GLRT)、加速度计测量方差检测(accelerometer measurements variance test,MV)、加速度计量测幅值检测accelerometer measurements magnitude test,MAG)、角速度量测能量检测[3](angular rate measurement energy test,ARE)、对磁场强度设定阈值的检测算法[4]、压力传感器检测算法[5]、摄像机检测算法[6]等。
基于OpenShoe项目[7]中使用的GLRT、MV、MAG、ARE四种检测算法,针对两种不同精度的惯导系统进行跑车实验,陈述这四种零速检测算法的理论基础,并对比分析四种检测算法的性能。
1零速检测算法
零速检测,顾名思义就是检测系统速度为零的时段,为零速修正做前期准备。通过把检测到的零速时段作为系统速度误差的外部量测信息,对系统的各项误差进行控制校正,提高系统定位精度。
零速检测可以理解为一个二元信号的统计检测,信源在某一时刻会输出两种不同信号状态之一,人们事先并不知道信源在这一时刻输出的是哪种信号,因而需要做出判决。为了分析方便,通常把信源的输出称为假设,在此记为假设H0和假设H1,并定义假设H0状态时有信号输出,载体处于运动状态;H1状态时无信号,载体是静止的[8]。

惯性测量单元由陀螺仪和加速度计组成,实验时安装在车顶部,其中陀螺仪输出载体坐标系下的角速率信息,加速度计提供载体坐标系中比力的测量值。这样一来,可以定义惯性测量单元的输出矢量为xk,
(1)

1)广义似然比检测(GLRT)
(2)
2)加速度计测量方差检测(MV)
(3)
3)加速度计量测幅值检测(MAG)

(4)
4)角速度量测能量检测(ARE)
(5)

(6)
2零速检测实验

表1 惯性器件主要性能指标
2.1实验系统介绍
实验中使用两种不同精度惯导系统,实验区域道路比较平坦,相邻历元高程变化较小。第一种系统是NovAtel公司的SPAN-LCI惯性测量单元[12];另一种是英国OxTS(Oxford Technical Solutions)公司生产的Inertial+惯性导航系统,是使用了MEMS陀螺仪和高精度加速度计的低成本惯导系统[13]。
2.2惯性器件性能参数
惯性器件光纤惯导SPAN-LCI和MEMS惯导Inertial+的主要性能指标如表1所示。
2.3车载实验分析
为了验证零速检测算法的效果,对光纤惯导SPAN-LCI和MEMS惯导Inertial+分别进行多次车载实验,组合导航系统安装在车顶部,与车固联,每次实验时间为一两个小时不等,实验后根据三种曲线图(速度时间曲线、统计量时间曲线、检测算法折线图)分别对两种惯导系统的四种检测算法性能进行对比分析。下面首先对实验中涉及到的三种曲线图做出解释。
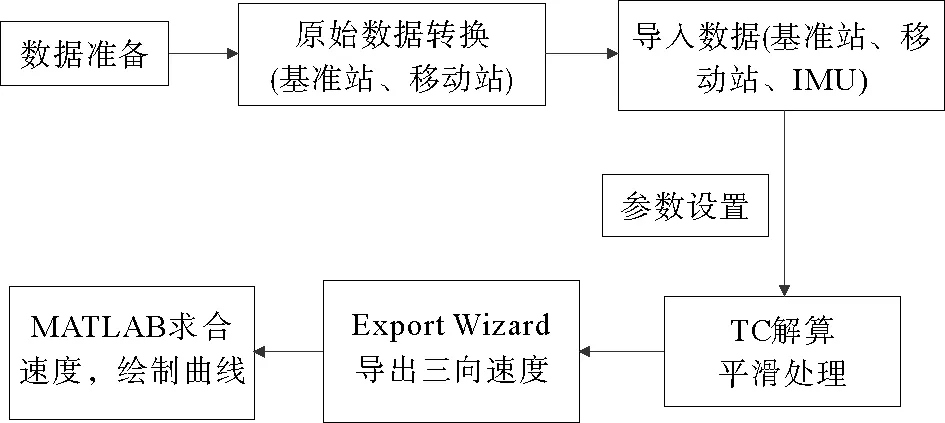
图1 合速度计算流程框图
1)速度时间曲线图
其中速度是通过Inertial Explorer软件对惯导数据和GPS数据进行紧组合,导出每一个时间更新点的三向速度,再经过MATLAB软件计算并绘制每个时间更新点的三向合速度,此时比GPS输出的速度要更准确。
合速度计算流程框图如图1所示。
2)统计量时间曲线图
由公式(2~5)计算各种检测算法的统计量,绘制每个时间点的统计量时间图像,根据统计量时间曲线和已知某段时间载体运动与静止状态找出最佳阈值。
3)检测算法折线图
通过判断统计量T与阈值γ的大小关系,绘制四种检测算法的折线图。折线图中折线值为0,表示阈值大于统计量,载体处于静止状态;而折线值为5时,认为载体存在速度。
2.4实验对比及讨论
分别对两种惯导系统下的四种检测算法进行对比研究:
1)SPAN-LCI
实验中分别绘制每种算法的整体图和部分时间段局部图,具体如图2~5所示,分别为SPAN-LCI惯导系统紧组合的速度时间曲线和GLRT、ARE、MAG、MV四种检测算法检测的零速折线图。在实验开始和结束阶段分别进行十分钟左右的初始对准,四种算法对这两个零速时段均能准确检测出来。每幅图中均绘制一段时间的局部图,放大124 000到125 500时间段1 500 s的载体组合速度时间曲线和各检测算法的折线图,由局部图可以清楚看出,检测出的折线值0或5跟实际组合速度基本吻合,虽然偶尔出现局部不吻合,但对于200 Hz数据率频繁变化的速度来说,检测的准确率已经较高,可达98%以上。
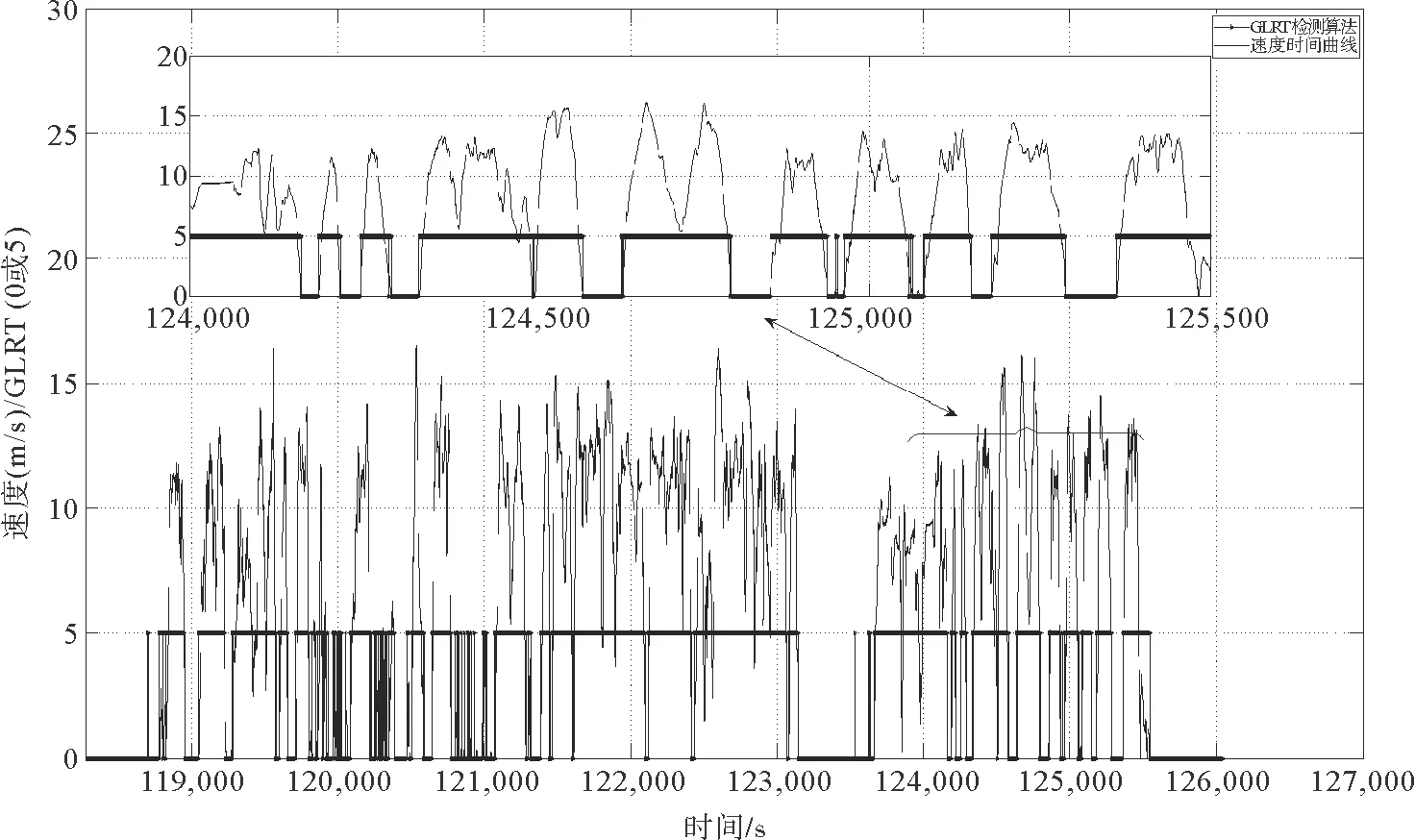
图2 紧组合速度与GLRT算法检测零速折线图结果对比

图3 紧组合速度与MAG算法检测零速折线图结果对比
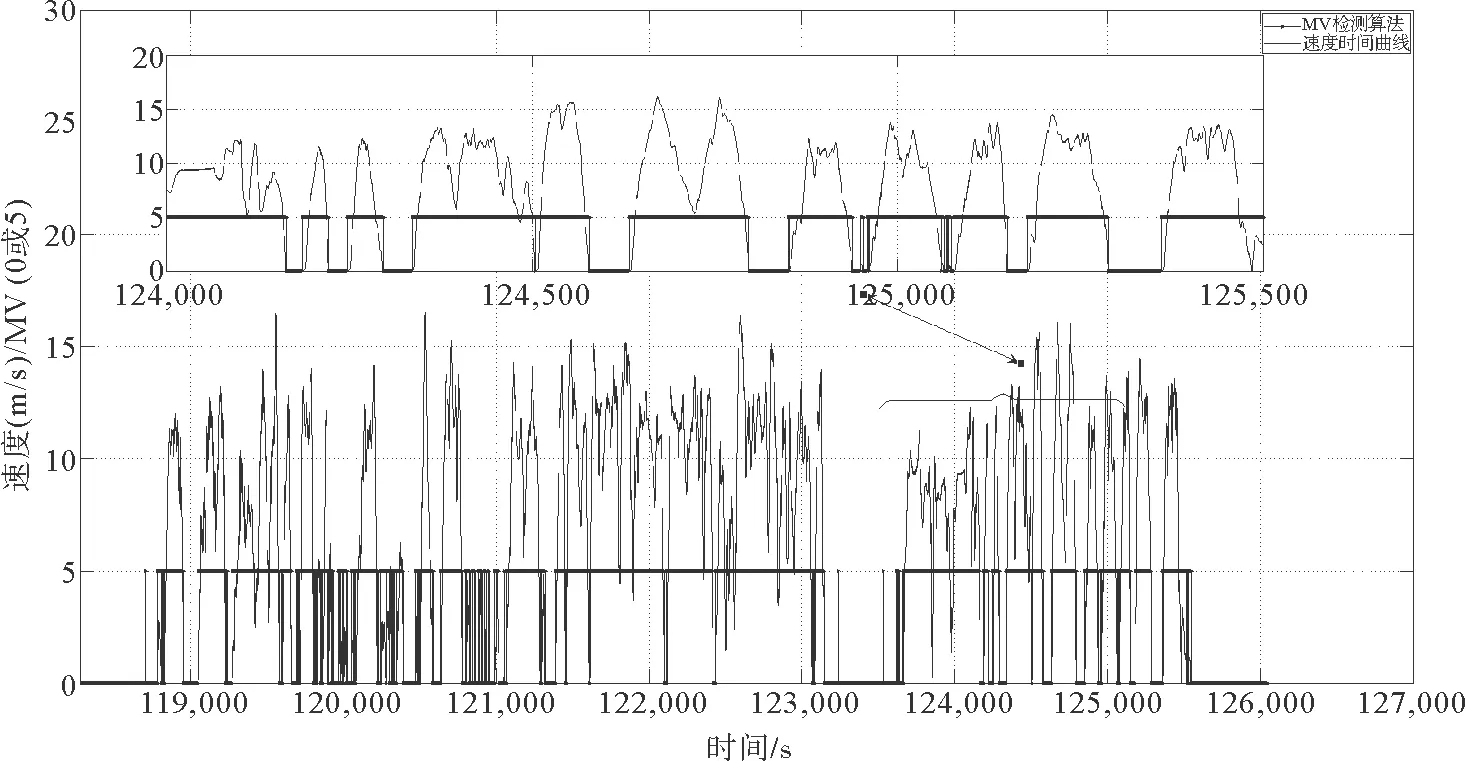
图4 紧组合速度与MV算法检测零速折线图结果对比
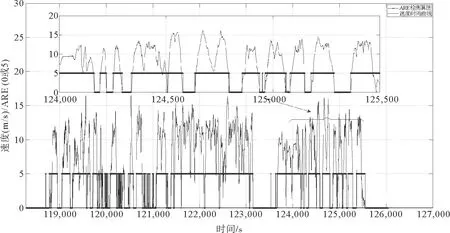
图5 紧组合速度与ARE算法检测零速折线图结果对比
检测算法W(Samples)γ(Threshold)GLRT5001×109ARE5001×109MV5001.5×105MAG5001.5×105
就精度来讲,MV和MAG算法主要受加速度信息的影响,检测精度较GLRT和ARE算法低;计算量方面,四种算法中GLRT算法的计算量最大;应用范围方面,ARE算法仅依赖于角速率信息,在一些受加速度信息影响较大的情况,ARE算法可能无法工作或者会有较差的检测精度。因此,就这种情况而言,GLRT要优于ARE算法,适用的范围更广。
2)Inertial+
如图6~9所示,分别绘制Inertial+惯导下四种算法的零速检测与实际紧组合的速度对比结果。表3为惯导系统的四种检测算法的阈值和采样数设置。实验中放大了1 000 s到2 800 s的曲线图,相对来说,GLRT算法和ARE算法检测精度较高,能够达到96%以上,但MV和MAG算法检测精度较差,可能是由于它们主要依赖于加速度信息的缘故。
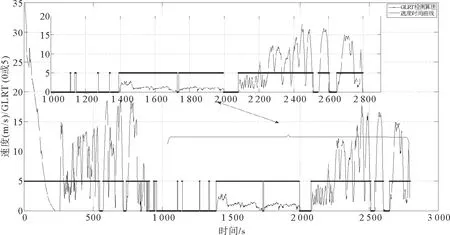
图6 紧组合速度与GLRT算法检测零速折线图结果对比

图7 紧组合速度与MV算法检测零速折线图结果对比
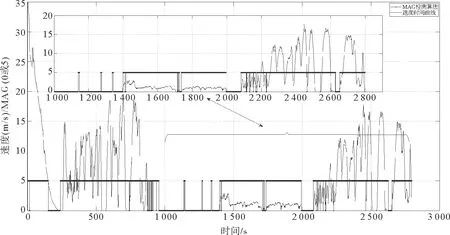
图8 紧组合速度与MAG算法检测零速折线图结果对比
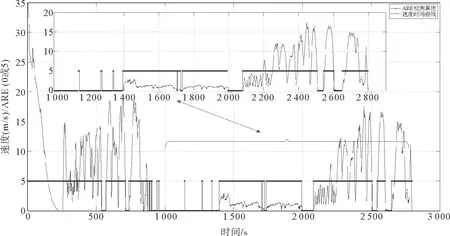
图9 紧组合速度与ARE算法检测零速折线图结果对比
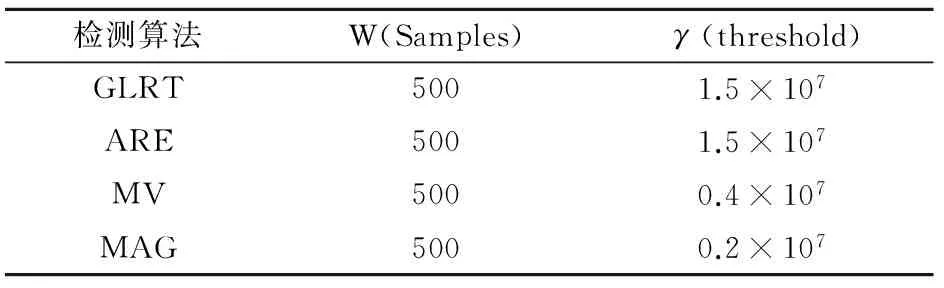
检测算法W(Samples)γ(threshold)GLRT5001.5×107ARE5001.5×107MV5000.4×107MAG5000.2×107
总的来说,Inertial+要比LCI惯导系统的检测精度低,应该是由于Inertial+属于MEMS惯导,LCI是光纤惯导系统,Inertial+的陀螺和加速度计精度本来就比LCI的低,LCI惯导能更精确敏感到此时的角速率和加速度信息。
3结束语
根据实测数据处理和上述讨论结果,可得出以下结论。
1)实验中对两种惯导系统的四种检测算法的零速检测折线图与组合速度时间图像进行了对比,设置速度的阈值为0.1 m/s。各曲线对比图说明零速检测折线图能基本反映载体的真实运动信息,检测算法比较合理,两曲线图的匹配度较高。
2)实验中阈值的选取很重要,阈值选得越大,速度的误判率就越高;相反,漏判率就越高。阈值的选取可以参考统计量时间图像,将某些时间的特殊运动情况作为条件,限制阈值的选取范围,更有利于阈值的选择。
4)不同精度的惯导系统使用相同检测算法情况下,检测精度随惯导系统的精度升高而提升。
参考文献:
[1]张天光,王秀萍,王丽霞.捷联惯性导航技术[M].北京:国防工业出版社,2007:1-3.
[2]高钟毓,王进,董景新,等.惯性测量系统零速修正的几种估计方法[J].中国惯性技术学报,1995,3(2):24-29.
GAO Zhongyu,WANG Jin,DONG Jingxin,et al.Several estimation methods for zero speed correction of inertial measurement system[J].Journal of Chinese Inertial Technology,1995,3(2):24-29.
[3]杨辉.基于MEMS传感器的高精度行人导航算法研究[D].厦门:厦门大学,2014:27-28.
[4]JIMENEZ A R,SECO F,PRIETO C,et al.A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU[C]//IEEE International Symposium on Intelligent Signal Processing,Budapest,Hungary,2009:37-42.
[5]HARLE R,TAHERIAN S,PIAS M,et al.Towards real-time profiling of sprints using wearable pressure sensors[J].Computer Communications,2012,35(6):650-660.
[6]AUBECK F,ISERT C,GUSENBAUER D.Camera based step detection on mobile phones[C]//Indoor Positioning and Indoor Navigation (IPIN),Guimarães,Portugal,2011:1-7.
[7]NILSSON J O,SKOG I, HANDEL P, et al.Foot-mounted INS for evergbody:An open source embedded foot-mounted INS[C]//Position Location & Navigation Sympoium.Myrtle Beach,South Carolina,2012:140-145.
[8]赵树杰,赵建勋.信号检测与估计理论[M].北京:清华大学出版社,2005:65-74.
[9]KAY S M.Fundamentals of statistical signal processing,Vol.II:Detection theory[M].Signal Processing.Upper Saddle River,NJ:Prentice Hall,1998:60-65.
[10]SKOG I,HANDEL P,NILSSON J O,et al.Zero-velocity detection:An algorithm evaluation[J].Biomedical Engineering,IEEE Transactions on Bionedical Engineering,2010,57(11):2657-2666.
[11]SKOG I,NILSSON J O,HANDEL P.Evaluation of zero-velocity detectors for foot-mounted inertial navigation systems[C]//Indoor Positioning and Indoor Navigation (IPIN),Guimaraães,Portugal,2010:1-6.
[12]NOVATEL.SPAN on OEM6 User Manual[EB/OL].(2015-01-28)[2016-03-20]http://www.novatel.com/support/search/items/Manual.
[13]OXTS.Inertial+ User Manual[EB/OL].(2012-09-28)[2016-03-20]http://www.oxts.com/products/inertialplus/#tab4.
(责任编辑:高丽华)
Performance Analysis of Different Zero Velocity Detection Algorithms in Inertial Navigation Systems
SHI Bo, LI Yaozong, CHENG Min, YANG Weibin
(College of Geomatics, Shandong University of Science and Technology, Qingdao, Shandong 266590, China)
Abstract:This paper discussed the detection performance of four zero-velocity detection algorithms with two sets of Inertial Navigation System (INS) of different precisions. By drawing velocity-time image, zero velocity line chart and statistical quantity curve chart, it analyzed the variation of curves between different inertial navigation systems with the same zero velocity algorithm and between different zero velocity algorithms with the same inertial navigation system. The results show that the zero velocity detection of the same algorithm is more accurate for an INS with better performance, while for a specified INS with different zero velocity detection algorithm, the gyro signal provides the most reliable information in zero velocity detection, as indicated by the comparison between the results of the generalized likelihood ratio test and the angular rate measurement energy test.
Key words:inertial navigation system; threshold; Neyman-Pearson criterion; zero-velocity detection; zero velocity line chart
收稿日期:2016-11-06
基金项目:国家科技支撑计划课题(2012BAB16B01);海洋公益性行业科研专项经费项目(201305034);车载移动测量系统中传感器间空间关系精密检校方法研究项目(J13LH04)
作者简介:石波(1979—),男,山东章丘人,副教授,博士,主要从事非线性滤波理论及组合导航定位定姿和移动测量系统多传感器硬件集成控制技术等方面的研究工作.E-mail:boshi_cn@163.com
中图分类号:V249.322
文献标志码:A
文章编号:1672-3767(2016)02-0057-07
