基于多时相遥感数据的云阴影检测算法
2016-07-07米雪婷田信鹏
米雪婷,孙 林,韦 晶,田信鹏
(山东科技大学 测绘科学与工程学院,山东 青岛 266590)
基于多时相遥感数据的云阴影检测算法
米雪婷,孙林,韦晶,田信鹏
(山东科技大学 测绘科学与工程学院,山东 青岛 266590)
摘要:云阴影检测是云检测中的一个重要环节,由于其光谱、纹理特征复杂,云阴影检测一直是云检测中面临的一大难题。本文针对传统云阴影检测方法的不足,提出一种基于多时相遥感数据支持的云阴影检测算法。该算法以同一区域相近时相或不同年份相近日期的卫星遥感地表反射率数据为参考,选取云阴影和典型地表样本点,对样本点进行统计分析,据其动态确定云阴影检测的阈值,并基于云阴影样本点去除土地利用/土地覆被变化对使用该方法进行云阴影检测造成的误判。基于Landsat8 OLI数据,选择不同区域碎云、薄云和厚云产生的云阴影分析该方法的有效性,重点分析水体等容易与云阴影混淆的区域。结果表明,该方法能有效识别云阴影,具有较高的整体检测精度。
关键词:地表反射率;云阴影;Landsat8 OLI;多时相;样本点
云阴影在遥感影像上表现为团块状且极不规则的较暗区域,从遥感影像中提取土地覆被信息时,阴影是造成混淆和误判的主要来源之一[1],阴影的存在不仅降低了地表变化检测的精度[2-3],也降低了遥感图像定量参数提取的精度[4-6]。有效识别云阴影对地物目标识别以及定量参数遥感反演具有重要意义[7-9]。
目前常用的云阴影检测方法主要有阈值法、分类法、基于观测几何的方法。其中,阈值法因其算法简单、计算速度快、效率高而得到最广泛的应用[10]。常用的阈值法有经验阈值法、滞后阈值法、云阴影地域增强模型等方法,其中经验阈值法的基本思想主要基于组分光谱差异的分析技术,进行波谱分析和特征通道选择,使用一个或多个波段或者衍生度量进行云阴影检测[11-12];滞后阈值法通过对黑暗区域分割进行云阴影区域的增长来检测云阴影,这种方法容易导致地形阴影增长为云阴影[13];李炳燮等[14-15]提出的云阴影地域增强模型主要是针对厚云产生的云阴影的检测方法,用相近时相或不同年份同一季节的无云数据生成地域增强模型进行云阴影检测,这种方法阈值的选择范围较宽,但对薄云影区域容易漏判,适用于厚云影区域的云阴影检测。
针对以上问题,提出了一种基于多时相遥感数据的云阴影检测算法,使用同一区域相近时相或不同年份相近日期的无云影像自动检测云阴影。其基本思想是:假定在无云影区域,不同时相的地表反射率变化相对较小,当待检测数据的像元反射率降低值超过一定阈值,则认为是云阴影像元,并且通过云阴影样本点统计分析,去除土地利用土地覆被变化对云阴影检测造成的影响。基于上述算法,在对图像进行辐射定标、大气校正和图像配准等处理基础上获得云阴影检测结果。本文运用目视解译方法分析不同地表覆盖上空的云阴影识别结果,该算法能有效检测大部分地表类型上空的云阴影像元。
1原理与方法
云阴影和典型地表反射率的差异是云阴影识别的主要依据,因此,典型地表光谱特征分析是首先要做的工作。从同一地区不同时相的两景影像上选取云阴影像元点、水体像元点和其他阴影像元点各200个进行光谱特征分析。图1为所选的用于光谱特征分析的印多吉湖附近区域的Landsat8 OLI(Operational Land Imager)数据,该区域包括水体、植被、山地等多种下垫面,地表类型丰富。图1(a)左图是2014年11月20日Landsat8 OLI数据的5,4,3波段彩色合成图,为待检测数据;右图是2015年2月27日无云Landsat8 OLI数据的5,4,3波段彩色合成图,为参考数据。待检测图像中白色块状区域为云覆盖区域,邻近的黑色部分是云阴影。图1(b)为统计的水体、植被和云阴影像元点的波谱曲线,可以看出,直接用阈值法不易检测云阴影像元与低反射率地表像元。图1(c),(d),(e)分别为待检测数据的植被、水体、云阴影在485~865nm波长范围内与对应区域的参考数据的反射率对比,其中虚线表示参考数据中反射率随波长的变化,实线表示待检测数据中反射率随波长的变化。从曲线图中可以看出,在无云影区域,不同时相、同一区域的地表反射率差异不大,而在云阴影区域反射率差值较大。
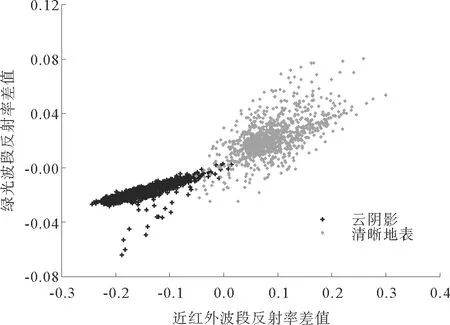
为了降低大气状况等因素对云阴影检测产生的影响,使用经过大气校正的地表反射率数据。将不同时相同一区域的无云影数据作为参考数据,基于待检测数据和参考数据,每一波段的反射率相对变化设定合理的阈值来检测云阴影,生成基于多时相的云阴影检测算法。将待检测数据上的像元与对应的参考数据上的清晰像元对比,当降低值超过给定的变化范围时,则认为此像元为潜在的云阴影像元。为了更精确地确定云阴影检测的阈值,对待检测数据和参考数据通过人工目视判读方法选取大量样本点,包括云阴影样本点和典型地物样本点。分别从待检测数据和参考数据选出云阴影区域以及清晰地表区域,图2为部分样本点的反射率差值散点图,在散点图中,云阴影样本点和清晰地表样本点并不是完全分离的。为了找到最佳阈值Ti,对选取的样本点进行统计分析,获取待检测数据和参考数据云阴影像元点差值的最大值和最小值,以0.001为步长变化,统计随着阈值变化云阴影检测的正确率和误判率(式1)。当正确率与误判率的差值达到最大值时,此时云阴影检测的正确率高并且误判率低,选取这个阈值为最佳阈值Ti。
(1)
式中,AC为云阴影检测的正确率,TP为识别正确的云阴影像元数,NP为总的像元数。
土地利用/土地覆被变化也会导致不同时相数据反射率的变化,容易与云阴影混淆。为了更精确地检测云阴影区域,分析了土地利用/土地覆被变化导致的反射率变化。云阴影区域的每个波段的反射率都要低于植被、裸土等其他地表类型的反射率,采用云阴影光谱反射率低的特征可区分云阴影和土地利用/土地覆被变化区域。因此,在上述检测基础上,以待检测数据云阴影像元库反射率最大值Ri为阈值,检测云阴影去除土地利用/土地覆被变化的影响,见公式(3)。
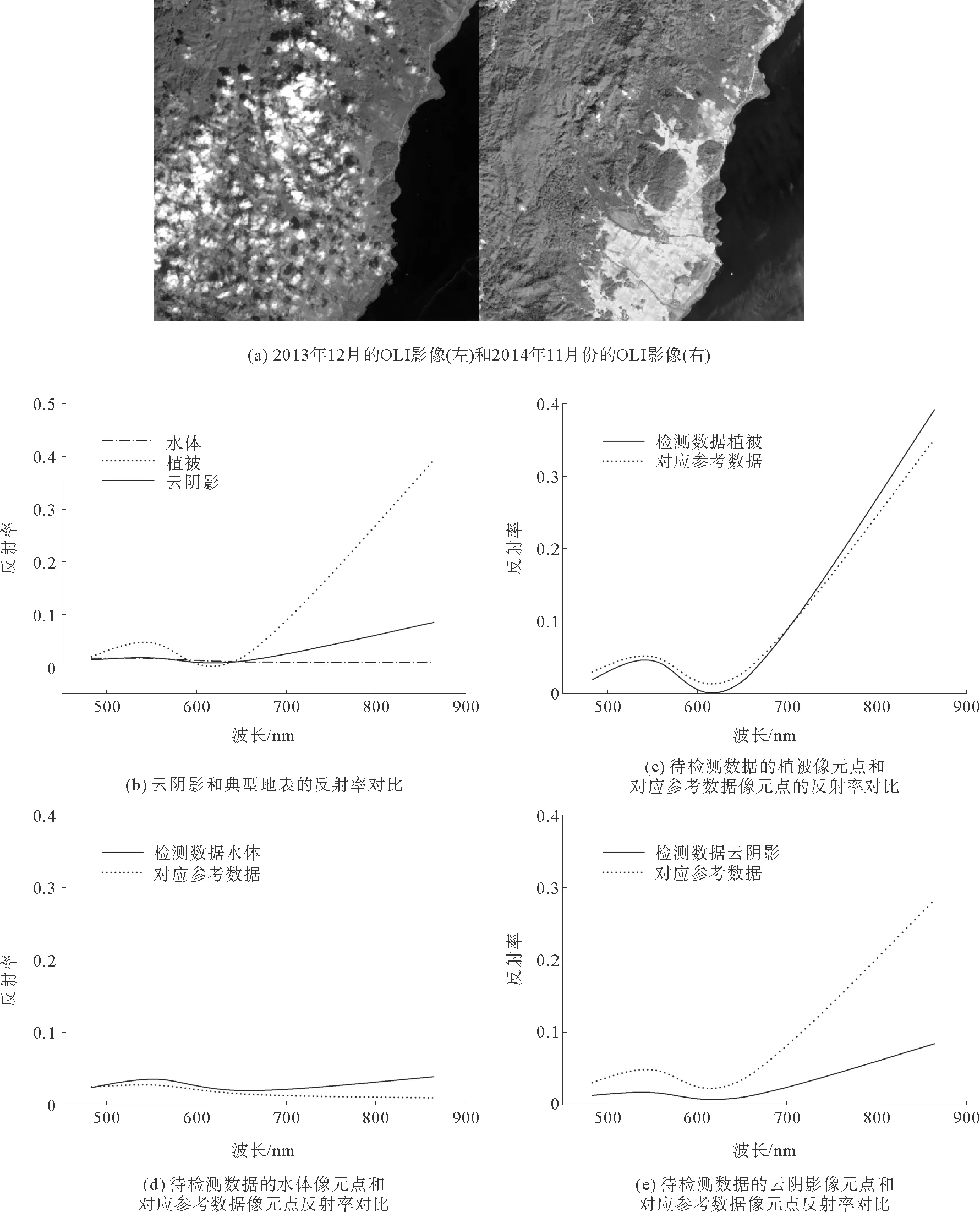
图1 印多吉湖区域待检测数据和参考数据反射率的对比分析
最终,云阴影检测的算法如下:
ρRi-ρTi>Ti,
(2)
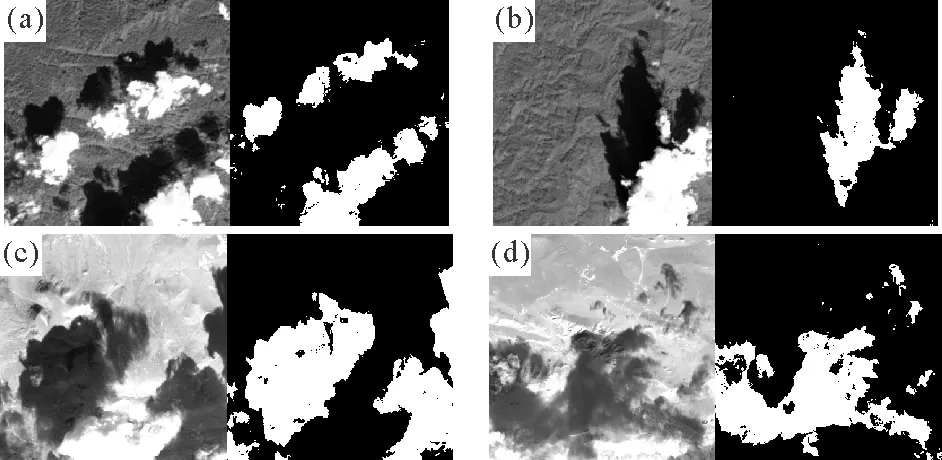
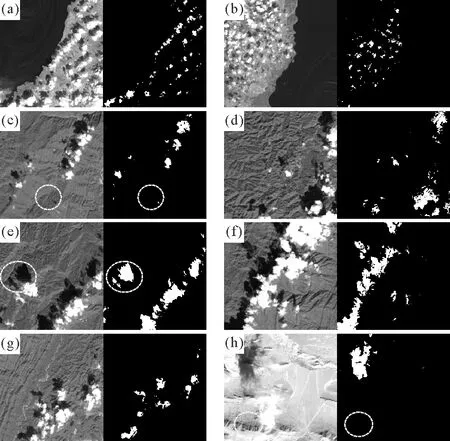
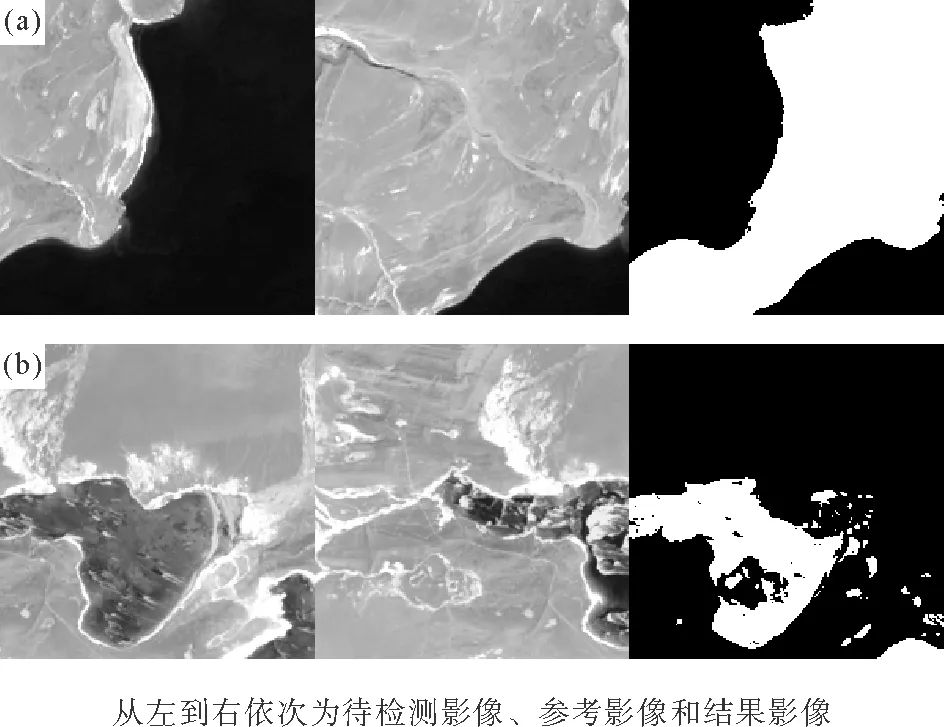
ρTi (3) 图2 像元点反射率差值二维散点图 i波段2345最佳阈值Ti0.0470.0470.0660.07反射率最大值Ri0.1800.2300.2400.134 其中,i=2,3,4,5;ρRi表示参考数据i波段的反射率;ρTi表示待检测数据i波段的反射率;Ti为根据正确率和误判率确定的波段i的最佳阈值;Ri为波段i云阴影像元库反射率的最大值,用来去除土地利用/土地覆被变化造成的影响。表1为各个波段云阴影检测的阈值,然后取公式(2)和公式(3)的交集为波段i的云阴影检测结果。若待检测数据的像元为云阴影像元,则像元值为1,否则像元值为0。最后,取四个波段云阴影检测结果的交集作为最终云阴影检测结果。 2试验与验证 2.1数据源与数据处理 运用Landsat8 OLI数据开展云阴影检测试验,验证该方法的有效性。Landsat8 OLI是2013年2月11日发射于美国加州的Landsat8卫星上携带的一个重要传感器,共有 9个波段,刈幅宽为185 km,重访周期为16 d,全色波段的空间分辨率为15 m,其他波段30 m[16-17]。表2为Landsat8 OLI数据波段及其波长范围。其中,本文选用的波段为蓝、绿、红和近红外波段。Landsat8 OLI数据具有获取周期短、覆盖面积广、数据利用性强等特点,被广泛用于土地利用/土地覆被时空变化等的研究与应用。选取Landsat8 OLI 2013—2015年的8景影像共四组数据进行云阴影检测。 表2 Landsat8 OLI数据波段及其波长范围 利用数据产品元数据中的辐射定标信息,将DN值转换到辐射亮度值(式4),并选择6S模型进行大气校正[18-20],计算地表反射率(式5)。最后,对同一区域不同时期的两景数据进行图像配准处理[21]。 Lλ=MLQcal+AL, (4) (5) 其中:Lλ表示波长λ处大气顶层辐射亮度值;ML,AL为定标系数;Qcal表示原始数据DN值;ρ为校正后的反射率;xa,xb,xc为大气校正参数。 2.2结果与验证 表3为选用的Landsat8 OLI数据的详细信息。将验证的四组数据经过辐射定标、大气校正、图像配准等处理,以获得相互匹配的地表反射率数据,最后将生成的云阴影检测算法应用到数据处理后的四组数据进行云阴影检测试验。云阴影检测结果如图3~5所示,其中每组左图为Landsat8 OLI数据的5,4,3波段合成的假彩色影像,右图为对应的云阴影检测结果,白色为云阴影,黑色为下垫面。 表3 测试数据的详细信息 图3 不同区域厚云产生的云阴影 图3为云阴影检测算法对Landsat8 OLI数据不同区域上空厚云产生的云阴影检测结果,厚云产生的云阴影相对于其他地物反射率差异大,容易识别,识别效果较好。由图3(a),(b)可以看出,植被上空的云阴影均可完整识别出来,并且边缘也与彩色合成图一致,极少误判。图3(c),(d)为沙漠上空的云阴影检测结果,对比假彩色合成图可以看出,云阴影有较好的识别效果。 图4 不同区域薄碎云产生的云阴影的检测 图4为云检测算法对不同区域上空薄碎云产生的云阴影检测结果。薄碎云的阴影在影像中存在不明显,碎云在图像中一般为小面积斑块,每个斑块独立并且极不规则,在空间关系上,云阴影通常与云保持特定的位置关系,外形轮廓也有一定的相似性。碎云所产生的阴影和碎云形状相似,相对于碎云有一定位移,每个单独斑块的云阴影面积相对较小,且边缘与碎云一致。从图4(a),(b),(c),(d),(e),(f)可以看出,云阴影检测算法对碎云产生的云阴影识别效果较好,能够有效识别云阴影及其边缘部分,误判较少。薄云产生的云阴影使影像变得模糊,削弱了部分地物信息,但地物并未被完全遮挡(图4(g)),其光谱特征里还包含部分地表信息,对云阴影的检测造成影响。传统的阈值法对薄云产生的云阴影识别效果不好,本文提出的云阴影检测算法可识别大部分薄云阴影,误判较少。 低反射率地表容易与云阴影混淆,也增加了云阴影检测的难度。从图5可以看出,基于多时相遥感数据的云阴影检测算法可在一定程度上去除水体等低反射率地表的影响,对于不同下垫面的厚云、薄云和碎云产生的云阴影均有较高识别精度,并且检测结果中云阴影识别完整、自然。 图5 低反射率地表区域的云阴影检测 3不确定性分析 提出的云阴影检测方法存在以下不确定性: 1)图像配准 基于多时相遥感数据的云阴影检测算法基于地表反射率数据,要求待检测数据与地表反射率数据精确配准。图像配准的精度对云阴影检测有很大影响,若图像配准不精确,会造成参考地表反射率不精确,直接影响云阴影检测结果。将检测数据向右下方移动若干个像元后进行云阴影检测,得到图6的检测结果,从左到右分别为待检测影像、参考影像和结果影像,从两组检测结果可以看出,由于待检测数据和参考数据没有精确配准,导致参考数据相对于待检测数据向右下方偏移,云阴影检测时对应的像元点没有匹配,影响了待检测数据地表反射率的降低值,造成部分水体区域的误判。 2)地表反射率数据质量 图6 图像配准对云阴影检测的影响 云阴影检测的精度主要取决于参考的地表反射率数据的质量,首先要求参考数据中无云。图7中三组影像是数据质量对云阴影检测造成的影响,从图7(a)中可以看出待检测数据中无云,对应的参考数据中存在小块薄碎云,两幅影像进行差值运算时,有云的区域会造成待检测数据降低值的增大,将参考数据中有云的区域误判为云阴影。同时,不同时相数据地表的变化也会影响云阴影的检测。图7(b)中待检测数据为2014年11月份的影像,参考数据为2013年12月份数据,参考数据中水体的边缘因结冰使反射率增大,造成对应区域待检测数据反射率降低值的增大,从而产生云阴影的误判。此外,下垫面的地表反射率也对云阴影检测有一定影响。如果下垫面的地表反射率过低,例如下垫面为水体、浓密植被等,这些低反射率地表在检测时容易漏判。图7(c)中的参考数据存在低地表反射率区域,在这些区域像元的降低值变小,造成薄云阴影无法识别和云阴影识别效果变差。数据质量对云阴影检测的影响最大,但在一定程度上这个因素是可以控制的。 图7 数据质量对云阴影检测的影响 4结论 基于不同时相遥感数据云阴影和典型地表光谱的差异,发展了多时相云阴影检测算法。 1)首先根据待检测数据和参考数据建立大量云阴影样本点和清晰地表样本点,当待检测数据的像元反射率降低值超过给定的阈值时,则认为是潜在云阴影像元,并统计正确率和误判率。 2)通过对样本点的像元反射率降低值统计分析自动确定阈值,并用云阴影样本点的反射率最大值去除土地利用/土地覆被变化对云阴影检测造成的影响。 3)最后用Landsat8 OLI数据进行云阴影检测实验,对比检测结果和假彩色合成影像,用遥感目视解译手段对云检测结果进行对比验证。结果表明:上述方法可以有效检测云阴影,云阴影识别精度整体较高,处理流程简单,检测效率高。 以地表反射率数据为基准数据进行阴影检测,可以有效降低复杂地表类型、大气环境等因素的影响。并且本文提出的云阴影检测算法是基于样本点数据的统计分析自动生成的,减少了主观性的影响,与传统阈值方法相比,算法简便可行、易于实现,识别精度高。对厚云产生的云阴影区域有很好的检测效果,对薄云产生的云阴影精度也有明显提高,在一定程度上去除了低反射率地表对云阴影检测造成的影响,提高了云阴影检测的精度。但本文提出的云阴影检测算法以像元为单位,对于影像数据之间的配准要求很严格,同时为了获取更好的结果,应进行高精度的大气纠正和匹配处理。 参考文献: [1]SAHA A K,ARORA M K,CSAPLOVICES E,et al.Land cover classification using IRS LISS III image and DEM in a rugged terrain:A case study in Himalayas[J].Geocarto International,2005,20(2):33-40. [2]LIU W,YAMAZAKI F.Object-based shadow extraction and correction of high-resolution optical satellite images[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2012,5(4):1296-1302. [3]ZHU Z,WOODCOCK C E.Automated cloud,cloud shadow,and snow detection in multitemporal Landsat data:An algorithm designed specifically for monitoring land cover change[J].Remote Sensing of Environment,2014,152:217-234. [4]BELWARD A S,VALENZUELA C R.Remote sensing and geographical information systems for resource management in developing countries[M].Dordrecht: Kluwer Academic Publishers,1991:32-37. [5]王树根,李德仁,郭泽金,等.正射影像上阴影和遮蔽的信息处理方法研究[J].测绘信息与工程,2004,29(4):1-4. WANG Shugen,LI Deren,GUO Zejin,et al.Method for information processing of shadows and occlusion on orthophotos[J].Journal of Geomatics,2004,29(4):1-4. [6]FENG S,LIN J,YANG Y,et al.Automated detecting and removing cloud shadows in full-disk solar images[J].New Astronomy,2014,32:24-30. [7]HAGOLLE O,HUC M,PASCUAL D V,et al.A multi-temporal method for cloud detection,applied to Formosat-2,Venμs,Landsat and Sentinel-2 images[J].Remote Sensing of Environment,2010,114(8):1747-1755. [8]HUANG C,THOMAS N G,SAMUEL N,et al.Automated masking of cloud and cloud shadow for forest change analysis using Landsat images[J].International Journal of Remote Sensing,2010,31(20):5449-5464. [9]梁栋,孔颉,胡根生,等.基于支持向量机的遥感影像厚云及云阴影去除[J].测绘学报,2012,41(2):225-231,238. LIANG Dong,KONG Jie,HU Gensheng,et al.The removal of thick cloud and cloud shadow of remote sensing image based on support vector machine[J].Acta Geodaetica et Cartographica Sinica,2012,41(2):225-231,238. [10]单娜,郑天垚,王贞松.快速高准确度云检测算法及其应用[J].遥感学报,2009,13(6):1147-1162. SHAN Na,ZHENG Tianyao,WANG Zhensong.High-speed and high- accuracy algorithm for cloud detection and its application[J].Journal of Remote Sensing,2009,13(6):1147-1162. [11]MARTINUZZI S,GOULD W A,GONZáLEZ O M R.Creating cloud-free Landsat ETM+ data sets in tropical landscapes:Cloud and cloud-shadow removal[C]//U.S.Department of Agriculture,Forest Service,International Institute of Tropical Forestry.Gen.Tech.Rep.IITF-32.,2007:22-25. [12]OREOPOULOS L,WILSON M J,VáRNAI T.Implementation on Landsat data of a simple cloud-mask algorithm developed for MODIS land bands[J].Geoscience and Remote Sensing Letters,IEEE,2011,8(4):597-601. [13]LE HéGARAT-MASCLE S,ANDRé C.Use of Markov random fields for automatic cloud/shadow detection on high resolution optical images[J].ISPRS Journal of Photogrammetry and Remote Sensing,2009,64(4):351-366. [14]周伟,关键,姜涛,等.多光谱遥感影像中云影区域的检测与修复[J].遥感学报,2012,16(1):132-142. ZHOU Wei,GUAN Jian,JIANG Tao,et al.Automatic detection and repairing of cloud and shadow regions in multi-spectral remote sensing images[J].Journal of Remote Sensing,2012,16(1):132-142. [15]李炳燮,马张宝,齐清文,等.Landsat TM遥感影像中厚云和阴影去除[J].遥感学报,2010,14(3):540-551. LI Bingxie,MA Zhangbao,QI Qingwen,et al.Cloud and shadow removal from Landsat TM data[J].Journal of Remote Sensing,2010,14(3):540-551. [16]ROY D P,WULDER M A,LOVELAND T R,et al.Landsat-8:Science and product vision for terrestrial global change research[J].Remote Sensing of Environment,2014(145):154-172. [17]孙林,田信鹏,于会泳,等.Landsat8 OLI城市地区气溶胶光学厚度遥感反演[J].山东科技大学学报(自然科学版),2015,34(5):47-55. SUN Lin,TIAN Xinpeng,YU Huiyong,et al.Remote sensing inversion of aerosol optical depth from Landsat 8 OLI over the urban area[J].Journal of Shandong University of Science and Technology(Natural Science),2015,34(5):47-55. [18]VERMOTE E F,TANRÉ D,DEUZE J L,et al.Second simulation of the satellite signal in the solar spectrum,6S:An overview[J].IEEE Transactions on Geoscience and Remote Sensing,1997,35(3):675-686. [19]KOTCHENOVA S Y,VERMOTE E F,MATARRESE R,et al,Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data.Part I:Path radiance[J].Applied Optics,2006,45(26):6762-6774. [20]郑伟,曾志远.遥感图像大气校正方法综述[J].遥感信息,2004,04:66-70. ZHENG Wei,ZENG Zhiyuan.A review on methods of atmospheric correction for remote sensing images[J].Remote Sensing Information,2004,04:66-70. [21]余先川,吕中华,胡丹.遥感图像配准技术综述[J].光学精密工程,2013,21(11):2960-2972. YU Xianchuan,LV Zhonghua,HU Dan.Review of remote sensing image registration techniques[J].Optics and Precision Engineering,2013,21(11):2960-2972. (责任编辑:高丽华) Cloud Shadow Detection Algorithm Based on Multi-temporal Remote Sensing Data MI Xueting, SUN Lin, WEI Jing, TIAN Xinpeng (College of Geomatics, Shandong University of Science and Technology, Qingdao, Shandong 266590, China) Abstract:Cloud shadow detection, as an important part of cloud detection, has been a tough problem in cloud detection because of its complex spectrum and texture features. Aiming at the shortcomings of the traditional clolid shadow detection, a cloud shadow detection algorithm based on multi-temporal remote sensing data was proposed in the paper by taking the reflectance of the Landsat8 OLI in the same region with closed dates or in different years as reference. The threshold value of cloud shadow detection is determined on the basis of the statistical analysis of the sample points, which were selected from the cloud shadow and typical surface on the OLI data. The false detection of land use or land cover change was removed based on cloud shadow sample points. Moreover, the proposed algorithm was validated by analyzing cloud shadows of thin cloud, thick cloud and broken cloud in different areas, especially areas where cloud shadow is easy to be mixed with water. The results indicate that the proposed method can effectively identify cloud shadows and has an overall higher detection accuracy.Key words: Landsat8 OLI; surface reflectance; cloud shadow; multi-temporal; sample points 收稿日期:2015-10-10 基金项目:山东省杰出青年基金项目(JQ201211) 作者简介:米雪婷(1992—),女,山东菏泽人,硕士研究生,主要从事大气遥感研究.E-mail:mixueting@yeah.net E-mail:sunlin6@126.com 中图分类号:P407 文献标志码:A 文章编号:1672-3767(2016)02-0064-09 孙林(1975—),男,山东枣庄人,教授,博士,主要从事大气探测方面的研究工作,本文通信作者.