基于RobotStudio的机器人柔性制造生产线的仿真设计*
2016-07-04陆叶
陆 叶
(茂名职业技术学院 机电信息系,广东 茂名 525000)
基于RobotStudio的机器人柔性制造生产线的仿真设计*
陆叶
(茂名职业技术学院 机电信息系,广东 茂名525000)
摘要:以工业机器人柔性制造生产线为研究对象,文章介绍了RobotStudio软件对生产线仿真建模的方案。根据零件加工工艺和生产流程,构建了机器人生产线的空间布局,利用三维建模软件为机器人设计取放料手爪,创建Smart组件实施动画效果,采集现场所需的I/O信号进行设备通讯,实现了一台ABB(Asea Brown Boveri)机器人为四台数控机床自动上下料的轨迹规划、离线编程和仿真过程。该设计方案与实际生产同步,为设计者和管理者提供生产线设计的理论依据和试验平台,降低了生产线设计、调试的成本,提高了生产效率。
关键词:RobotStudio;工业机器人;柔性制造;仿真
0引言
目前,工业机器人在我国制造行业的应用日趋广泛,但是对机器人生产线的设计、改造、过程监控、产品可制造性的预测等方面缺乏快速响应。机器人柔性制造生产线的虚拟仿真技术是借助虚拟现实技术、机器人技术与计算机技术结合,在虚拟环境中对生产线各元素、生产过程等进行仿真模拟,用更加经济、有效的方式对柔性制造生产线进行合理配置,降低设备投资风险,已成为工业机器人应用发展的趋势。
国外对工业机器人三维模拟仿真技术的研究起步较早,不同的机器人厂商为自己生产的机器人开发了离线编程仿真软件,如瑞典 ABB 提供的Robot Studio、日本FAUNC的 ROBOGUIDE、MOTOMAN的MOTOSIMEG等。还有离线编程软件如西门子的ROBCAD、达索的DELMIA等,这些软件对机器人生产线的仿真设计也提出了相关解决方案[1-2]。近年来,我国在机器人领域发展迅速,杨建宇等提出利用虚拟现实技术对机器人进行仿真、监控和遥操作集成的研究方法[3],张文香等利用VC++和OpenGL开发了工业机器人的三维仿真系统[4]。国内知名的新松机器人、广数机器人、FOXBOT机器人等都开发有机器人编程软件,但主要用于对机器人的现场编程调试,在离线编程、生产线系统集成等方面的深入研究和应用略显不足。
本文目的是为了进一步完善柔性制造生产线的设计体系,对机器人生产线的组成、上下料工作站、离线编程以及仿真模拟等进行研究,探讨利用ABB机器人的虚拟仿真软件RobotStudio对机器人柔性制造生产线进行仿真设计的技术方案,为机器人生产线的研究提供理论依据和试验平台。
1机器人柔性制造生产线仿真系统
实际生产中,机器人柔性制造生产线主要由工业机器人、可编程控制器(PLC)、数控机床(CNC)、送料机和其他周边设备组成。以PLC为控制核心,通过PLC连接外围设备、建立设备间通讯及管理,实现机器人在数控机床和送料机之间的上下料和转运。
机器人柔性制造生产线仿真系统选用ABB IRB 2600机器人,其精度高、操作速度快、适合上下料、物料搬运、弧焊等领域[5]。添加了专门的末端执行器(手爪)可为数控机床自动上下料。内置RobotStudio软件拥有CAD 模型导入、路径自动规划、离线编程、仿真调试、程序上下载、二次开发等功能[6]。其仿真控制模块与实际机器人运行情况一一对应,仿真信号、程序等也是实际机器人生产线运行过程中的信号及程序,还可以进行干涉检查以及运行情况的报警,因此非常准确的模拟出实际机器人运行的情况。通过该软件仿真模拟、调试机器人柔性制造生产线的生产过程,优化编程路径,为生产提供真实的验证。
2仿真系统设计
2.1系统工作流程及生产线布局
如图1所示,车削加工的轴零件表面由圆柱、圆弧、槽、内孔、内槽、内螺纹等表面组成,需要两次装夹。根据零件加工工艺要求和车削节拍,由两台数控车床组成一个车削加工单元,分别完成车削的两道工序,一台机器人可为两个车削单元的四台数控车床上下料。数控车床平行对面摆放,机床之间安置有导轨,工业机器人安装在上面来回运动为机床上下料,两台送料机分别进行毛坯和成品的供料运料。把送料机放在第一道工序两台数控车床的端部位置,方便机器人抓取待加工和卸下加工好的工件,物料搬运采用AGV小车搬运或者利用另外的机器人实现运送[7]。

图1 车削轴零件图
RobotStudio自带机器人库、模型库等模型,可根据要求选用相应型号的机器人并直接加载到工作站中,为处理多工位的需要,还为机器人配备了行走导轨。但是该软件的造型功能比较有限,大多数情况下需要其他的三维CAD软件进行建模等操作后再由接口导入,如利用UG软件设计好机床等设备的三维仿真模型,转换为.STL或.SAT等格式,导入该软件来完成建模布局工作。机器人柔性制造生产线的空间布局如图2 所示。
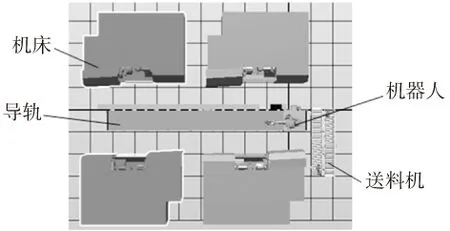
图2 机器人柔性制造生产线的空间布局
2.2机器人上下料手爪的设计

图3 机器人手爪
考虑到机器人的工作流程,取毛坯一次可为两台机床自动上下料,在ABB机器人的六轴末端必须装有夹取工件的上下料手爪。由于气压传动的反应迅速、安全可靠、能量损耗小、成本低廉,因此采用气压传动方式,包含气缸、电磁阀、传感器及机械部件等,利用三维建模软件设计的手爪如图3所示。该手爪用法兰和机器人的六轴末端法兰连接,两夹持端成一角度,方便调整位置和姿态,同时两套气缸分别控制两个夹持端动作,用于夹取毛坯、半成品或成品,手爪上安装有工件检测传感器,实现自动上下料。
2.3生产线动态Smart组件的设计
在RobotStudio中创建机器人上下料的仿真工作站,送料机构、机器人手爪、数控机床等装置的动态效果对整个工作站起了极其重要的作用[6]。Smart组件能实现动画效果,以数控机床Smart组件为例,首先添加子组件,如本体子组件poseMover、动作子组件Attacher和Detacher、逻辑信号子组件LogicGate和LogicSRLatch等;然后设定各子组件的属性连结,即A组件的动作会引起B组件的变化;最后创建机床Smart组件所需的I/O信号:输入启动信号distart、延迟信号dideley,门开到位输出信号doopen,用于与各Smart子组件进行信号交互。数控机床Smart组件设计如图4所示。机床Smart组件的动态仿真模拟了真实的机器人为机床自动上下料的工作过程。

图4 数控机床SMART组件设计
2.4机器人生产线仿真运行I/O信号
真实的生产线以PLC作为中央控制系统,将PLC与机器人等设备I/O板进行连接,采用Profibus现场总线,接收并处理机床、送料机和工业机器人等发送来的信号[8]。仿真生产线中,SMART组件此时可以看成PLC,只要将该组件的输入/输出信号与机器人的输入/输出信号相关联,模拟PLC与机器人、机床的大数据量通信,离线编写生产线程序,就可以实现生产线整体的仿真效果。表1为机器人生产线部分I/O信号。

表1 机器人生产线部分I/O信号
3系统的编程与仿真调试
3.1机器人上下料路径规划
对机器人上下料手爪运动路线进行设计,由于机床内夹具、送料机、机器人间固定及夹具安装有偏差,需要在取放料区域使用不同的WORK工件坐标系,设定机床A使用WORK1,机床B使用WORK2,机床C使用WORK3,机床D使用WORK4,送料机使用WORK5。一个车削单元的二台机器人上下料路径规划如图5示意图所示。
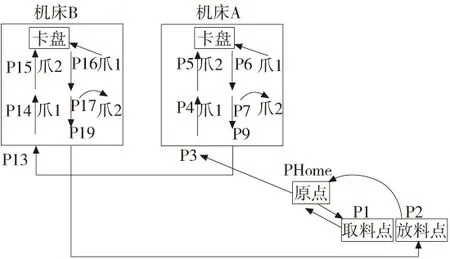
图5 一个车削单元的机器人上下料路径规划
工业机器人在原点等待,直到轴坯料由送料机运送到指定的位置,工业机器人开始取料。手爪夹取一个毛坯,等待机床A加工完成以后,先卸下机床A上加工完成的半成品,把毛坯放到机床A上加工,然后等待机床B加工完成,再取下成品,把将半成品放到机床B上加工,把成品放到成品送料机里,如此循环动作。在自动运行前需要按照以上点位要求,将点位示教保存并生成机器人轨迹。图6中示教点的连线表示机器人运动路径。

图6 一个车削单元的机器人上下料路径仿真
3.2机器人生产线流程设计
根据机器人上下料路径规划来设计如图7的机器人生产线流程图。

图7 机器人生产线流程图
3.3机器人程序的编制
RobotStudio软件准确离线编程的关键是虚拟机器人技术,同样的代码运行在PC和机器人控制器上。根据机器人上下料路径规划和生产线流程图,完成I/O信号的设置,程序数据的创建,目标点的示教,就可以编写相应的机器人控制程序。程序编写完成后可直接传输到机器人控制器,RAPID程序离线开发,保证柔性制造生产线仿真与实际运行同步。
ABB机器人生产线的主程序和部分例行程序如下:
PROCmain()!主程序
rIniAll!调用初始化例行程序
WHILE TRUE DO
IF di01Auto=1 THEN!判断自动运行信号
PickM ( )!调用取毛坯例行程序
PlaceM ( )!调用放毛坯例行程序
PickB ( )!调用取半成品例行程序
PickC ( )!调用取成品例行程序
PlaceB ( )!调用放半成品例行程序
PlaceC ( ) !调用放成品例行程序
ENDIF
WaitTime 0.2!等待时间
ENDWHILE
ENDPROC
PROC rIniAll !初始化例行程序
Accset 100,100; !加速度控制
VelSet 200,2000;!速度控制
ConfJOff;
ConfLOff;!运动控制
rReset_pout;!调用复位输出信号例行程序
rHome;!调用回Home点程序
Set do06Start;!机器人可以取件
ENDPROC
主程序中通过调用例行程序来实现机器人的各种动作,首先调用初始化程序,该程序检查机器人是否在原点pHome,对所有的传感器信号、布尔量复位,设置初始速度和加速度等。另外6个例行程序是机器人上下料和搬运子程序,利用WHILE循环把初始化程序和其他例行程序隔开,每次循环等待时间为0.2s,以免不满足机器人动作条件时程序运行过快,CPU超负荷[9]。程序可以在机器人虚拟示教器上修改,也可以在RobotStudio的RAPID编辑器中修改,调试方便快捷。
4结束语
随着现代加工工艺要求提高,机器人柔性制造生产线大量应用。本文介绍了机器人生产线的设计方案,根据加工实例的要求,构建了仿真生产线的布局;设计机器人专用的取放料手爪;创建了动态Smart组件,模拟PLC与生产线、机器人、机床等设备的I/O信号进行通信;实现了ABB机器人自动上下料、搬运的路径规划、离线编程和仿真调试。该技术综合了机械、电气、气动、传感、通信、仿真等方面,为生产线设计提供了可行性的依据,将大大缩短生产线的设计制造、调试周期,节约成本,对深入研究和应用机器人离线仿真技术起到一定作用。
[参考文献]
[1] Gregory F. Rossano,Carlos Martinez, Mikael Hedelind,et al. Robot Path Programming Concepts: An Industrial Perspective on Path Creatio [C]. Robotics (ISR), 2013 44th International Symposium on,2013.
[2] Liwei Qi, Xingguo Yin, Haipeng Wang,et al. Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot[C].Robotics, Automation and Mechatronics, IEEE, 2008.
[3] 杨建宇,谢华龙,韩秀峰,等.基于虚拟现实的机器人异地仿真与监控.基于虚拟现实的机器人异地仿真与监控[J].东北大学学报(自然科学版),2013,34(11):1634-1637.
[4] Zhang Wenxiang,Zou Fengshan,Qu Daokui,et al.Research of Key Technologies on 3D Simulation System of Industrial Robot[C]. Proceedings of the 7th World Congress on Intelligent Control and Automation,2008.
[5] 叶晖,管小青.工业机器人实操与应用技巧[M].北京:机械工业出版社,2013.
[6] 叶晖.工业机器人工程应用虚拟仿真教程[M].北京:机械工业出版社,2014.
[7] 朱华炳,秦磊,张希杰,等. 基于工业机器人的齿轮轴磨削自动化系统设计与研究[J].组合机床与自动化加工技术,2013(12):41-44,48.
[8] 程智勇,李晓娟,陈华龙,等. 基于FANUC0iTD和GSK工业机器人柔性制造单元的设计[J].机床与液压,2014,42(21):97-100.
[9] 叶晖.工业机器人典型应用案例精析[M].北京:机械工业出版社,2014.
(编辑赵蓉)
Simulation Design of Robot Flexible Manufacturing Line Based on RobotStudio
LU Ye
(Department of Mechanical and electrical information,Maoming Polytechnic College,Maoming Guangdong 525000,China)
Abstract:Taking the industrial robot flexible manufacturing production lines as the research object, a scheme of modeling of manufacturing line based on RobotStudio software is presented in this paper. According to parts processing technology and production processes, the spatial layout of the robot manufacturing line is constructed. The robot gripper is created by using three-dimensional modeling software. Smart modules for animation and the required I / O signals for device communications is acquired. An ABB(Asea Brown Boveri)robot is applied to four CNC machine tools, automatic loading and unloading trajectory planning, off-line programming simulation. The scheme synchronizes with the actual production, providing theoretical basis for the design of the production line as well as the test platform for designers and managers, reducing the cost of production line design, debugging, and improves the production efficiency.
Key words:RobotStudio; industrial robot; flexible manufacturing; simulation
收稿日期:2015-08-02;修回日期:2015-08-25
*基金项目:广东省高等职业教育教学改革项目(粤教高函[2014]205号);茂名市科技计划项目(茂科字[2014]11号);茂名职业技术学院科研项目(茂职院[2013]23号)
作者简介:陆叶(1979—),女,广东阳江人,茂名职业技术学院讲师,硕士,研究方向是机器人技术、仿真技术,(E-mail)lisa786@163.com。
中图分类号:TH165;TG659
文献标识码:A