某型飞机航姿系统试飞故障分析
2016-07-02吕宏锐
吕宏锐,拜 斌
(海军装备部,陕西 西安 710089)
某型飞机航姿系统试飞故障分析
吕宏锐,拜斌
(海军装备部,陕西 西安 710089)
摘要:针对某架机空中飞行时,航向姿态系统中航向位置指示器上的无线电罗盘一台指针卡滞这一罕见故障现象,从系统交联关系和输入输出逻辑上进行详细分析,提出设计改进措施,为以后系统设计提供借鉴。
关键词:航向姿态系统;偏流转接器;无线电罗盘;同步器
某型飞机出厂试飞时发现,航向姿态系统中航向位置指示器上的无线电罗盘一台指针卡滞。在飞行中,将“偏流回中/工作”开关置于“工作”位置,航向位置指示器能够正确指示GPS输出的偏流信号,而无线电罗盘指针却卡滞在某一方位上不动。在地面进行通电检查时,故障却不能复现。空中飞行时测量无线电罗盘方位指针的驱动电流达到输出44mA(理论值为3~5mA),其它电源输入参数均满足要求。故障出现后,及时组织技术人员采用换件、导通、绝缘检查等方法排故后,在地面通电检查时正常,但空中故障现象依旧,经过反复多次排故都未能解决。对这一故障产生的原因从原理上进行了分析,查出故障隐患,提出解决措施并排除故障。
1飞机交联分析
无线电罗盘与航向姿态系统的航向位置指示器交联采用了国产标准同步器,偏流转接器与2101 I/O GPS交联采用了ARINC 407标准同步器,偏流转接器与航向姿态系统的航向位置指示器交联采用了国产标准同步器。交联关系原理如图1所示。
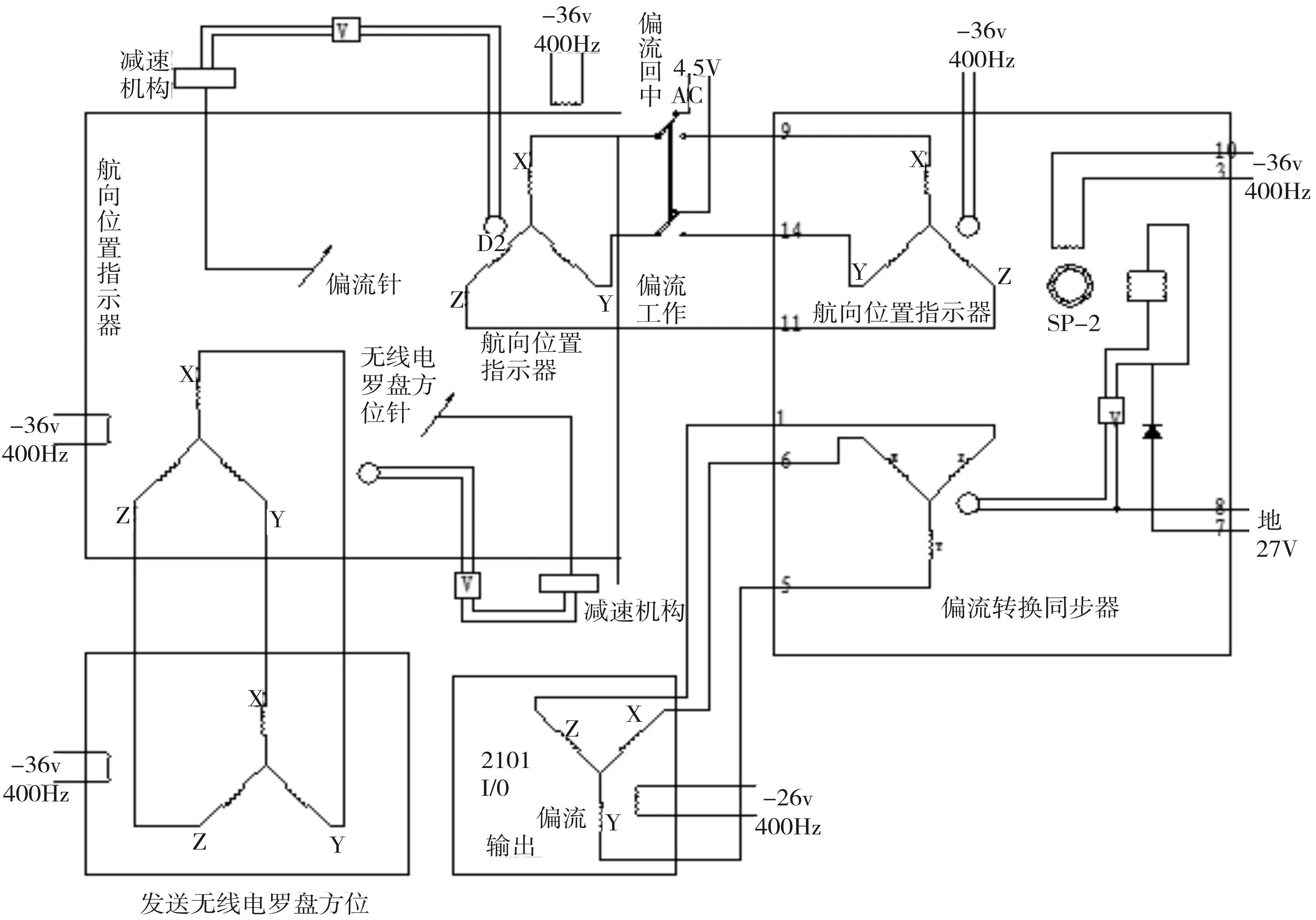
图1系统交联关系原理
无线电罗盘将无线电罗盘方位通过国产标准同步器输入给航向位置指示器,航向位置指示器接收到无线电罗盘信号后,通过信号放大带动减速机构,再带动无线电罗盘指针指示无线电罗盘方位[1-2]。
偏流转接器中的同步接收器通过接收2101 I/O GPS输出的偏流信号,将信号放大后带动减速器、带动主轴转动,同时带动同步发送器转子转动,同步器定子输出转角放大5倍后的偏流角信号给航向位置指示器,再通过一整套随动系统带动偏流针指示偏流角。当2101 I/O GPS的偏流输入信号超过30°时,偏流转接器内部的随动系统将被设置的挡块制动而有可能损坏偏流转接器。偏流转接器的13、14孔为基准电源36V、400Hz的输入端。
从交联原理图上可以看出,无线电罗盘方位指示随动系统和偏流指示随动系统应当互不影响,各自按自己的系统工作。
2同步器控制自整角机角度传输电磁特性分析
自整角机是一种感应式系统控制电机,它通过定子与转子之间的电磁感应作用,将输入转轴的机械转角变换为与此转角成一定函数关系的电信号,使远距离的机械转轴精确地保持相同的转角同步旋转,实现角度位置的远距离传输、变换和指示[3]。控制式自整角机的工作原理如图2所示。
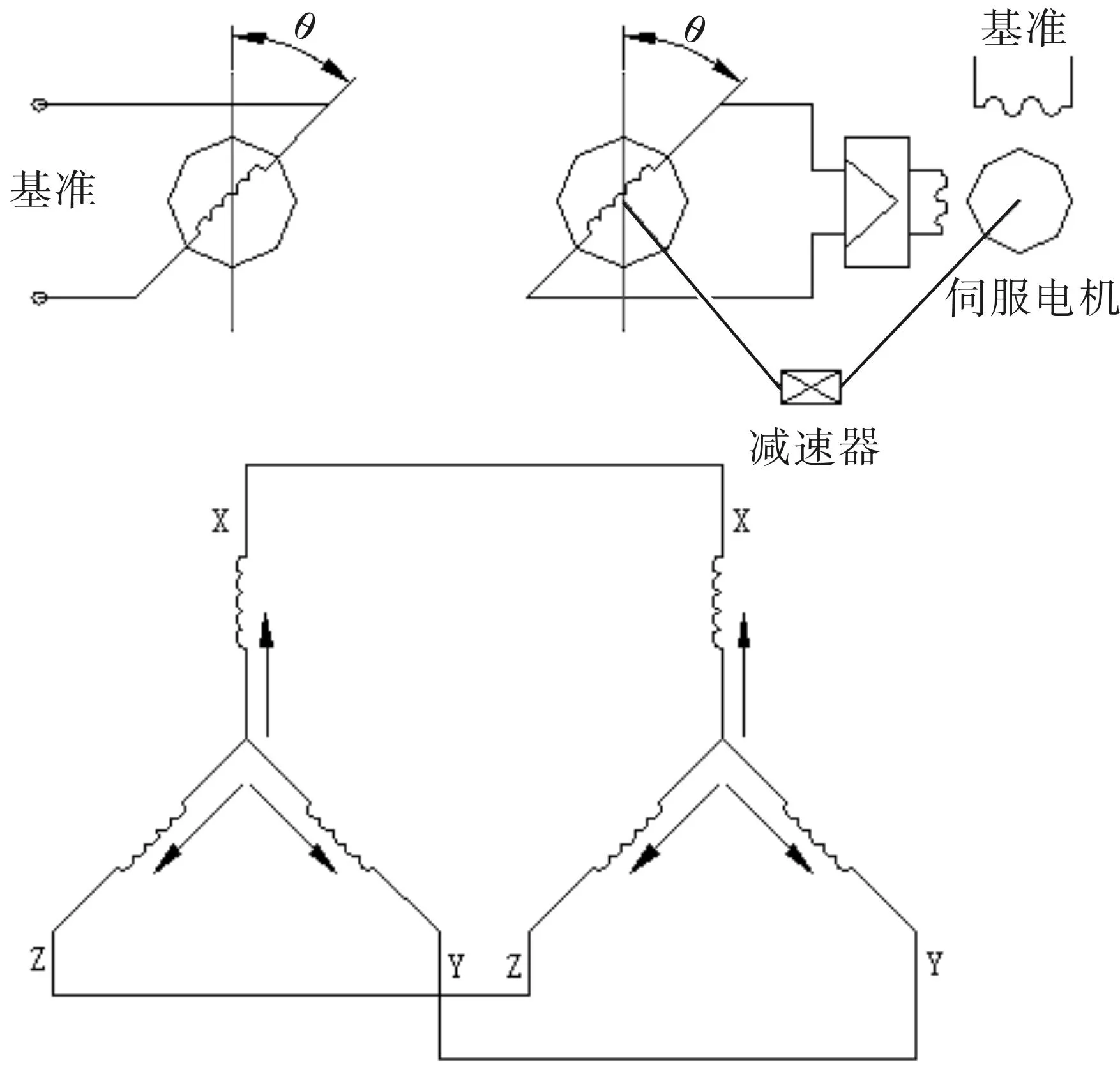
图2 控制式自整角机的工作原理
控制式自整角机由发送机和接收机组成,发送机的转子轴与发送轴固定连接,发送机和接收机的定子绕组按相序对应连接。当U基准输入基准电压时,将产生一个脉振交变磁通,交变磁通在定子三相绕组中产生感应电势,在接收机的转子两端就产生了与输入角度成比倒的电信号[4-5]。将该电信号放大后驱动伺服电机和减速器,带动罗盘指针复现输入角度。两者协调后,通过负反馈电路保持控制系统的平衡。实际应用中,应当掌握电压输出的关系式:
Uxy=Umsinθ
(1)
Uyz=Umsin(θ+120°)
(2)
Uzx=Umsin(θ-120°)
(3)
其中,θ为传输角度;Uxy、Uyz和Uzx为三相同步器的线电压;Um为电压最大幅值。Um与基准电压的大小有关,对于ARINC 407标准同步器,基准电压为26V(400Hz),则Um=11.8V;对于国产标准同步器,基准电压为36V(400Hz),则Um=16V。
3原理分析
在飞行中,将“偏流回中/工作”开关置于“工作”位置,航向位置指示器能够正确指示GPS输出的偏流信号,而无线电罗盘指针却卡滞在某一方位上不动。在地面进行通电检查时,故障却不能复现。空中飞行时测量无线电罗盘方位指针的驱动电流达到输出44mA(理论值为3~5mA),其它电源输入参数均满足要求。理论上说当随动完成后,驱动电流应趋于零。从实测参数上看,驱动电流远远大于理论上随动系统失调后需要的驱动电流,而且无线电罗盘方位指针被卡滞时,其驱动电流一直在增大,这是随动系统不平衡的必然现象。
在无线电罗盘指针被卡滞后,将“偏流回中/工作”开关置于“回中”位置,无线电罗盘指针即正确指示无线电罗盘方位。从交联原理图上可以看出,当“偏流回中/工作”开关置于“回中”位置时,强制给航向位置指示器偏流输入端一个同相位4.5V电压信号,同时切断偏流转接器输出的偏流信号。也就是说,只要切断偏流转接器与航向位置指示器的交联并输入一定的电压值,则无线电罗盘方位指针即能正常指示。但从交联原理图上不难看出无线电罗盘方位指示随动系统和偏流指示随动系统毫无关系,为什么将偏流工作开关置于“回中”位置时,无线电罗盘方位能立即指示正确的方位呢?由此只能怀疑从偏流转接器到航向位置指示器的偏流输入信号品质不好或其它原因,造成输入信号超过航向位置指示器的输入要求而使无线电罗盘指针被卡滞。
按照上述的角度传输公式进行偏流角输入/输出信号的理论计算并进行实际测量,来验证是否满足理论计算要求。首先检查2101 I/O GPS输出到偏流转接器的偏流信号是否满足理论要求。在地面将偏流置于10°,理论计算的2101 I/O GPS输出值应为Uxy=2.05V,Uyz=9.04V,Uxz=-11.08V。经过实际测量,理论值与实际值完全吻合,这就排除了2101 I/O GPS输出的偏流信号导致故障的可能性。再检查偏流转接接收将2101 I/O GPS输入的偏流信号,并放大5倍后的国内标准同步器输出信号值。理论计算的偏流转接器输出值应为Uxy=12.5V,Uyz=2.78V,Uxz=15V。经过实际测量,偏流转接器输出的电压值与理论计算值差异很大,但实际测量的电压关系却能满足三相同步器相位差120°的要求。这就是航向位置指示器能正确指示偏流值,却找不出无线电罗盘指针被卡滞的原因。从理论上来说,不符合要求的偏流信号输入,航向位置指示器却能正确指示航向位置是一种假象。
在这种情况下,偏流随动系统的跟踪速度将会非常慢,远远达不到理论要求的10°/s的速度,而地面检查中往往忽略该项指标的检查。另外,飞行中偏流角度一般小于10°,且变化量很小,因此飞行员无法正确判断偏流指针的跟踪速度。
偏流转接器偏流信号输出符合理论要求的一个先决条件,就是偏流转接器中的同步器输出激磁线圈应当输入36V(400Hz)的基准电压,经测量飞机线路输入电压值,完全满足该条件。再分解偏流转接器,发现偏流转接器内部传动机构齿轮被机械限动装置多次限动,造成传动机构齿轮链不能完全啮合,引起偏流转接器输出的偏流信号不能满足理论输出要求,这就是该故障的症结所在。
4深层原因分析及改进措拖
首先,航向位置指示器内部的偏流指示随动系统机械传动部分对无线电罗盘指示随动系统存在干涉,有潜在的设计缺陷。
从电气原理线路分析,无线电罗盘指示随动系统和偏流指示随动系统应当互不影响,但航向位置指示器内部的机械传动装置比较复杂,内部装有可指示飞机航向、无线电罗盘方位、偏流、下滑偏差、航道偏差、偏航距和航向给定信号等多种随动系统。每个随动系统都包括伺服电机、整套减速机构、指示系统和负反馈测速电机等机械部件。当各种信号满足输入要求时,不同的随动系统都应正常工作,不互相干涉。通过此次故障排除,认识到航向位置指示器至少存在当偏流信号输入不符合标准要求时,偏流随动系统机械部分对无线电罗盘指示随动系统的机械传动部分存在干涉,在航向位置指示器设计时应注意这一点。
其次,偏流转接器内部随动系统被机械限位装置多次限动的原因。
偏流转接器在设计时限位偏流输入信号为30°。如果信号超过30°,设置的制动装置对随动系统进行制动,反复制动将可能损坏偏流转接器。2101 I/O GPS的偏流信号在地面通电时,可通过测试限定输出0°、10°和30°信号。但地面飞行准备时,2101 I/O GPS处于导航或其他状态,因缺少空速和地速信号而使导航三角形未建立,偏流的输出是随机的且往往超过30°,多次地面试验和飞行准备都将有可能反复对偏流转接器内部的随动系统进行制动,就可能因打坏偏流转接器而造成输出的偏流信号不满足理论要求,造成无线电罗盘一台指针被卡滞的深层次原因。虽然该典型故障发生在一架机上,但存在的隐患具有普遍性。
综上所述,要彻底解决问题,保证故障不再发生,就应该对该系统进行更新设计。但若重新设计和排列,其内部复杂的机械传动将会遇到许多不确定的因素;即使解决了两个随动系统相互干涉的问题,也解决不了偏流转接器随动系统被反复制动的难题;而且飞机每天都在进行飞行训练,时间上也不允许让所有飞机停飞来解决潜在的故障。因此必须在不影响正常飞行训练的前提下,提出改动量最小又行之有效的解决办法。
航向姿态系统设置“偏流回中/工作”开关的作用就是为了在地面通电时,保护航向位置指示器内偏流信号不超过30°,因此,地面通电时应将“偏流回中/工作”置于“回中”位置。只有在空中时,才将开关置于“工作”位置。但该“偏流回中/工作”开关却没有对偏流转接器实施保护,造成当2101 I/O GPS地面输出超过30°时,可能将偏流转接器打坏。因此,建议设计将“偏流回中/工作”开关由两刀改为三刀,增加一组触点用于地面飞行准备时,将“偏流回中/工作”开关置于“回中”位置,在保护航向位置指示器的同对,又切断了偏流转接器工作电源,保护了偏流转接器(更改后部分线路见图3)。
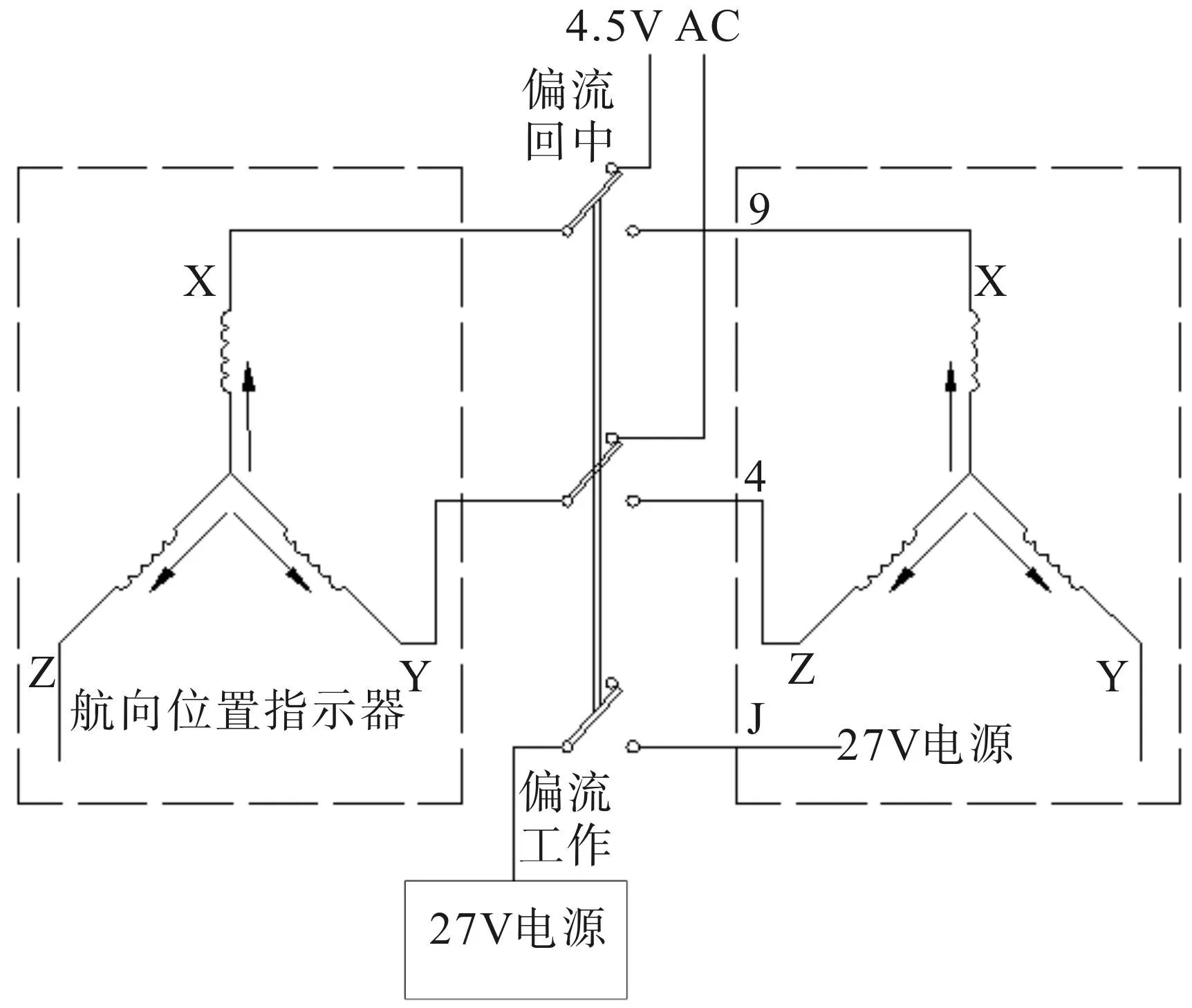
图3 改进后的偏流信号控制线路
5结语
对所有在役和正在生产待交付的某型系列飞机进行了线路设计更改后,经过飞行验证,这种控制线路的更改对排除上述潜在的隐患是非常有效的,彻底解决了偏流转接器和航向姿态系统的随动部分被反复制动而引起的指针卡滞问题。
参考文献
[1] 廉佳.某型无线电罗盘自动定向速度慢故障分析[J].西安航空技术高等专科学校学报,2011,29(3):27-28,54.
[2] 鲁凯彬,田孝华.飞机机载无线电罗盘导航测角误差分析[J].计算机仿真,2015(8):26-29.
[3] 钱金山.航向位置指示器的综合应用[J].硅谷,2011(6):15-18.
[4] 贾兴荣,李振刚.航姿系统可靠性状况及维修对策[C]//中国航空学会.航空安全与装备维修技术——航空安全与装备维修技术学术研讨会论文集.北京:国防工业出版社,2014:696-701.
[5] 孙百香,王社伟,段凤阳,等.航姿系统新型故障诊断方法的研究[C]//中国航空学会.第二届中国航空学会青年科技论坛文集.北京:航空工业出版社,2006:420-426.
[责任编辑、校对:梁春燕]
Analysis of AHRS Failure of An Aircraft Flight
LVHong-rui,BAIBin
(Naval Equipment Department,Xi′an 710089,China)
Abstract:For the rare phenomenon of radio compass lagfix of AHRS in air,the system logic relations and input/output are analyzed,and design improvement measures are put forward for the reference of system designers in the future.
Key words:AHRS;drift adapter;radio compass;synchronizer
收稿日期:2016-03-07
作者简介:吕宏锐(1963-),男,陕西西安人,高级工程师,从事航空仪表研究。
中图分类号:V267
文献标识码:A
文章编号:1008-9233(2016)03-0017-04
