多普勒三维激光运动姿态测量技术
2016-06-28张深逢李路可陈士钊宋云峰翁九星
张深逢,李路可,陈士钊,宋云峰,翁九星
(1.宁波舜宇智能科技有限公司,浙江 余姚315400;2.郑州科技学院,郑州450064)
多普勒三维激光运动姿态测量技术
张深逢1,李路可2,陈士钊1,宋云峰1,翁九星1
(1.宁波舜宇智能科技有限公司,浙江 余姚315400;2.郑州科技学院,郑州450064)
提出一种新型多普勒三维激光运动姿态测量技术。该技术基于多普勒效应干涉原理,由He-Ne激光器发出偏振光,通过载波调制和信号解调,获取被测物体的振动信息,并通过测振单元的并联、自动聚焦系统、五路信号获取三维信息、同步数据采集等子系统的混联,最终实现非接触式、跨尺度、高精度的三维测量。该技术克服了传统接触式传感器频带范围窄、测振精度低、不适合测试轻质、软质物体的缺陷,可实现在狭小空间、电磁干扰、微振动、冲击振动、高温环境下三维振动测量。
多普勒;三维激光;振动测量;非接触式传感器
0 引言
激光测控仪器市场现处于快速增长期,容量超200亿元,年复合增长率近30%,行业平均利润率达40%,其中激光测振仪长期被德国Ploytec、日本基恩士、日本小野测器、日本理音、德国GOM、西班牙Aries等垄断;而传统加速度传感器、电涡流传感器等被丹麦BK、美国PCB、美国Bently、瑞士KISTLER、美国ENDEVCO等企业垄断,因此,为突破国外垄断,国产激光测振仪器必须要大力开展研究工作。作为振动测量的度量衡,激光测振具有广阔的成长空间;振动测量技术发展水平是衡量国家重大机电产品设备质量、可靠性水平的重要标志。
光电振动测量仪具有非接触测量、精度高、稳定性好等特点,在某些特殊场合,如卫星陀螺控制器的振动测量、航空发动机的叶片振动测量、火炮发射时炮管的振动测量、微机电系统振动测量等问题,必须依靠非接触测量的光电振动测量仪来完成。然而,长期以来我国的光电振动测量仪几乎完全依赖进口,部分产品由于牵涉到国防及国家安全领域,还无法进口,这一局面极大地限制了我国相关重要领域的发展。为此,替代进口、打破禁运,研制具有自主知识产权的三维光电振动测量仪迫在眉睫。
三维激光运动姿态测量技术具备高频、高精度以及高抗干扰性的测量性能,能够实现仪器监控、控制及诊断功能,激光测振数据通过UFF(Universal File Format)格式文件独立输出并实现关联,输出的UFF格式文件输入到模态分析软件中,实现高、低频振动数据的振动模态分析。
1 测振原理
新型三维激光运动姿态测量原理:五个激光测振单元由He-Ne激光器发出偏振光,经过聚焦系统,聚焦于被测对象上一点,散射光束返回到激光测振模块形成干涉,激光测振模块内部设置的探测器探测干涉信号,解调出被测对象沿激光测振单元通过光束聚焦系统的出射光束的投影分量,经过空间矢量算法,得出振动物体的三维振动信息。其中单个测振单元的测振原理图如图1所示[1-3]。

图1 测振单元测振原理Fig.1Principle of vibration unit vibration
测振单元主要由一台高精度激光干涉仪和一台信号处理器组成,高精度激光干涉仪内的He-Ne激光器发出的偏振光(频率为f0)由分光镜BS(Beam Splitter)分成两束,一路作为测量,一路用于参考,测量光通过声光调制器具有一定频移F,再被聚焦到被测物体表面,物体振动引起频移(f=2v/l)。系统反射光并与参考光汇聚在传感器上,两束光便在传感器表面形成干涉,干涉信号的频率为F+f,携带了被测物体的振动信息,信号处理器将频移信号转换为速度和位移信号[4-5]。
2 三维算法设计
如图2所示,沿光束聚焦系统的光轴方向定义为z轴,被测对象的激光照射点作为原点,并垂直于z轴建x-y坐标系,激光测振模块10布置于z轴,出射光束40的投影分量为v40,激光测振模块11布置于x轴h41/2处,出射光束41的投影分量为v41,激光测振模块12布置于x轴-h42/2处,出射光束42的投影分量为v42,则所述激光测振模块10的出射光束沿z轴方向的振动分量为

校准过程中,一般采用振动台沿z轴方向,但实际校准过程中,振动台由于摆放误差,很多情况下也会有沿x方向振动,两组激光测振组件测量的投影分量为

由以上三式,可以实现光束41与光束42的角度校准:

激光测振仪角度校准完成后,振动物体在xz面内二维振动信息:

yz平面内夹角自校准和自检测以及振动信息与xz平面内的解决方案及过程相同,同是共用一个光束聚焦系统31,如图3所示,沿光束聚焦系统的光轴方向定义为z轴,将被测对象的激光照射点作为原点,并垂直于z轴建立x-y坐标系,激光测振模块10布置于z轴,岀射光束40的投影分量为v40,激光测振模块13布置于y轴h43/2处,岀射光束43的投影分量为v43,激光测振模块14布置于Y轴-h44/2处,岀射光束44的投影分量为v44,则所述激光测振模块10的出射光束沿z轴方向的振动分量为式(1)。
校准过程中,一般采用振动台沿z轴方向,但实际校准过程中,振动台由于摆放误差,很多情况下也会有沿x或y方向振动,则两组激光测振组件的投影分量为

由以上三式,可以实现出射光束43与出射光束44的角度校准值:

激光测振仪角度校准完成后,振动物体在yz面内二维振动信息:

由此,新型三维激光运动姿态的测振原理如图4所示,五组激光测振模块40、41、42、43、44同步测试被测对象5,得到独立的五组振动数据v40、v41、v42、v43和v44,经过上述算法的计算,最终得到三维

图2 三维激光运动姿态测振原理图(xz平面)Fig.2The 3D laser vibration measuring principle of motion(xzplane)

图3 三维激光运动姿态测振原理图(yz平面)Fig.3The 3D laser vibration measuring principle of motion diagram(yzplane)
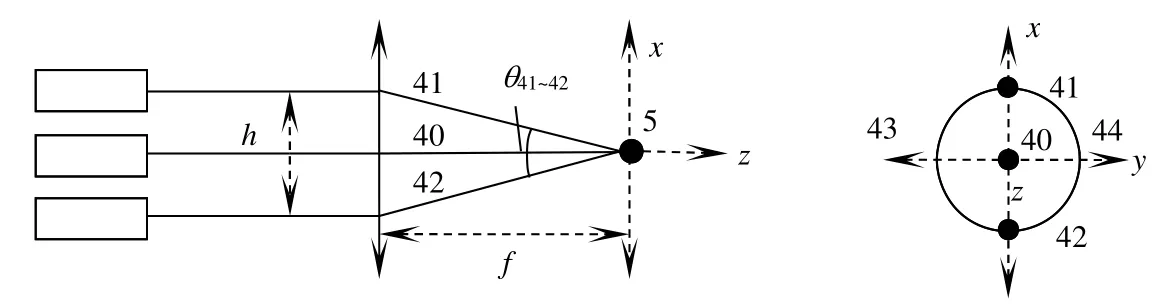
图4 三维激光运动姿态测振原理图Fig.4The 3D laser vibration measuring principle of motion diagram
信息vx、vy、vz和夹角校准值。
3 三维激光运动姿态技术突破及创新
1)激光束夹角自检测与自校准
在传统激光测量技术中,三维激光测量物体振动,主要由三个单点激光测振仪发出三束激光,检测被测物体在三个方向的振动,这种测量技术的缺陷是三个单点激光测振仪空间物理位置和发射出的激光束夹角无法准确定位,存在多大的安装误差检测不出来,导致测量数据存在较大的精度误差,且测得反应物体运动状态的参数不是实时的,需要通过投影计算才能获得某一时间点被测物体在三维方向的运动参数[7-8]。
本技术创新点在于克服了现有技术的缺陷,提出一种新型三维运动姿态测量方法,即采用五束激光测振,五束测量光束发射到物体上,实时测得被测物体在三维方向的振动信息和运动姿态,而且能够对多个激光传感器发出的激光束夹角实现自动检测和自动校准的功能,具体原理为:首先同步测量得到五组数据v40、v41、v42、v43和v44,经过空间矢量的合成与分解计算,得出精确的夹角以及空间正交坐标轴上的三维振动数据vx、vy、vz,用代替存在机械安装误差的相应夹角,使得测出三维振动vx、vy、vz的精确度大大提高,更加准确反映出被测对象的真实振动状态;
2)可实现多种选择组合的三维激光振动测量
如图4所示,三维激光运动姿态测量关键部件共有5束激光组成测振系统,即使其中1束或2束激光组件损坏,只要其中成三角形排列的三束激光不损坏,仅需切换软件算法和改变采集通道,即可实现三维激光测振。满足三维激光测振的组合形式有:(40 41 43)、(40 42 43)、(40 42 44)、(40 41 44)、(41 42 43)、(41 42 44)、(41 43 44)、(42 43 44)共计8种组合方式可实现三维振动测量的功能,大大提高了仪器的使用率。
组合的三维激光振动测量解决方案及过程,如图5所示。方案包含3套激光测振组件,每组激光测振组件的出射光束沿光束聚焦系统光轴正交分布,分别为第一激光测振组件通过光束聚焦系统的第一出射光束、第二激光测振组件通过光束聚焦系统的第二出射光束,以及第三激光测振组件通过光束聚焦系统的第三出射光束,第三激光测振组件沿光轴布置,将沿光束聚焦系统的光轴方向定义为z轴,将振动物体的激光照射点作为原点,并垂直于z轴建立x-y坐标系,第一激光测振组件布置于y轴处,第二激光测振组件布置于x轴处,物体振动沿第一出射光束和第二出射光束的投影分量为v41、v42,所述第三激光测振组件测量z轴方向上的振动信息v40:

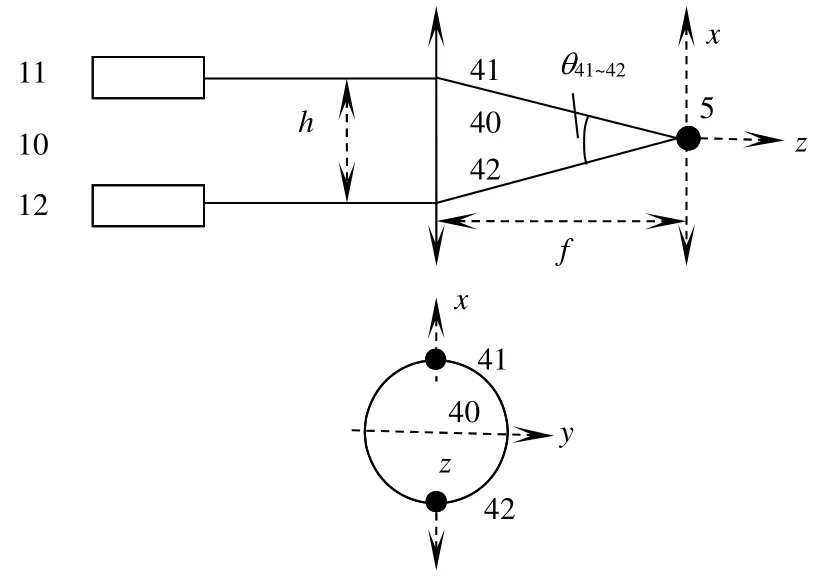
图5 组合的三维激光振动测量方案原理图Fig.5The 3D laser vibration measuring principle of motion combined diagram
通过三个组件的正交分布得到沿y轴的振动分量vy,振动物体沿x轴的振动分量vx分别为


其中:f为光束聚焦系统的焦距,为第一出射光束与第三出射光束间距,为第二出射光束与第第三出射光束间距。由此,可通过安装高度h41、h42和焦距f计算得到,v40、v41、v42通过数据采集可以得出,则三维振动vx、vy和vz均可计算,因而便实现了成三角形排列的三束激光的三维测振,从而实现了5束激光的8种组合:(40 41 43)、(40 42 43)、(40 42 44)、(40 41 44)、(41 42 43)、(41 42 44)、(41 43 44)、(42 43 44)功能实现。
4 展望与总结
激光仪器的发展历时已久,1965年,Barker等人发明了迈克尔逊干涉型测速仪;60年代末,D.Simpson和P.R.Smy设计了差分混频单频激光多普勒测速仪。70年代之后,出现了激光多普勒测速仪,并一直被沿用和发展。90年代,德国PTB研制了零差式和外差式改进型迈克尔逊干涉仪,对位移、速度、加速度、角位移、角速度、角加速度六个基本运动量全部实现激光干涉法校准的检测,并制定了单维度光电振动测量仪的国际标准。
目前,国外所查到的多维空间的光电振动测量通常多局限于静态测量,如基于光学三角测量法原理,利用CCD摄像机、振镜和激光线投射器对大型工件的快速测量。韩国Kim Jong-Ahn等人设计了全息反射型多自由度测量系统[4]。对于多维动态测量的报道有:德国PTB和日本NMIJ在其研制的三维振动校准装置中均采用三个单通道光电振动测量仪对三自由度振动进行测量,但所用光电振动测量仪的类型、安装方式及数据处理方法等均未提及。BOSCH公司采用三维扫描式激光测振仪(SLDV)研究其电动工具的特性;Peeter S研究用3个CCD摄像机以及发光二极管测量飞机的模态,其特点是测量频响下限可达零频,且更容易安装、不影响被测物体的运动,可以直接测量刚体的6D运动。
今后,激光测振仪器将会沿着以下几个方向发展:1)体积小型化:激光测振仪因光学器件的限制,使得整机的体积过大,不便使用;2)智能化:激光测振仪器由于要使用到光学镜头,使用过程中,不同的工作距离需要不同的焦距,使用极其不便,尤其不便于工业自动化的普及,因此,激光测振仪器将会采用自聚焦技术;3)扫描技术:激光测振仪器大多数发出一束激光,只能测得一点的振动,扫描技术的出现,将会使得激光测振仪器能够实现从点到线到面,甚至到体的测振;4)维度数量:目前,激光测振仪大多数是单维测振方式,市场上三维测振方式较少,市场决定方向,因此,三维测振是大势所趋[8-9]。
[1]Dudzik Grzegorz,Adam Tomasz Waz,Pawel Kaczmarek,et al.Multichannel Laser-Fiber Vibrometer[C]//Proceedings of SPIE-The International Society for Optical Engineering,2013,8703:322-324.
[2]Dudzik Grzegorz,Waz Adam Tomasz,Kaczmarek Pawel R,et al.Demodulator Electronics for Laser Vibrometry[C]//10th International Conference on Vibration Measurements by Laser and Noncontact Techniques–Aivela,Ancona,Italy,June 27-29,2012,1457(1):35-40.
[3]Gates Richard S,Jon R Pratt.Accurate and Precise Calibration of AFM Cantilever Spring Constants Using Laser Doppler Vibrometry[J].Nanotechnology(S1361-6528),2012,23(37):375702.
[4]Hof C,Zwahlen G.On the Measurement of the Mechanical Impedance of Artificial Mastoids[J].Measurement Science&Technology(S0957-0233),2012,23(12):5-7.
[5]Holzer Markus,Friedemann Mohr.Aspects of Signal Processing in Laser Vibrometry and Their Embedded-Realisation on Fpga with Ni-Labview[C]//17th International Conference Radioelektronika,Brno,April 24-25,2007,31(2):1-5.
[6]Kissinger Thomas,Thomas O H Charrett,Ralph P Tatam.Range-Resolved Interferometric Signal Processing Using Sinusoidal Optical Frequency Modulation[J].Optics Express(S1094-4087),2015,23(7):15-31.
[7]全燕鸣,黎淑梅,麦青群.基于双目视觉的工件尺寸在机三维测量[J].光学 精密工程,2013,21(4):1054-1061. QUAN Yanming,LI Shumei,MAI Qingqun.The workpiece size three-dimensional measuring based on binocular vision[J]. Optics and Precision Engineering,2013,21(4):1054-1061.
[8]王向军,叶岗,叶声华,等.利用激光实时检测大量规则图形尺寸的平均值[J].激光杂志,1986,7(4):199-203. WANG Xiangjun,YE Gang,YE Shenghua,et al.The average value of the rules by laser real-time detection feature sizes[J]. Laser magazine,1986,7(4):199-203.
[9]宋云峰.磁头飞行姿态测试系统的研究[J].系统工程与电子技术,1991(12):41-65. SONG Yunfeng.The research of magnetic head attitude Measurement System[J].Systems Engineering and Electronics,1991(12):41-65.
3D Laser Doppler Motion Measurement Technology
ZHANG Shenfeng1,LI Luke2,CHEN Shizhao1,SONG Yunfeng1,WENG Jiuxing1
(1.Ningbo Sunny Intelligent Technology Co,.Ltd,Yuyao315400,Zheijiang,China;2.Zhengzhou University of Science and Technology,Zhengzhou450064,China)
We propose a new kind of 3D laser Doppler motion measurement technology.The technology is based on the Doppler,He-Ne laser makes polarized light,through the carrier modulation and demodulation signal,gets the vibration information of the object,and through the vibration unit,automatic focusing system,3D information algorithm of five beam signal and synchronous data acquisition subsystem,finally realizes the non-contact,across scales,high precision 3D measurement.The technology overcomes weaknesses of the traditional non-contact sensor narrow band range,low vibration precision,not suitable for testing of lightweight,soft defect of the object,and can realize the 3D vibration measurement of the narrow space,electromagnetic interference,micro vibration,impact.
Doppler;3D Laser;vibration measurement;non-contacting sensor
TP391.9
A
10.3969/j.issn.1003-501X.2016.11.006
1003-501X(2016)11-0033-05
2015-12-24;
2016-06-20
国家重大科学仪器设备开发专项(2013YQ470765)资助课题
张深逢(1988-),男(汉族),浙江余姚人。工程师,硕士,研究方向:激光测振,振动算法。E-mail:changgongzsf@163.com。
