基于三维激光扫描技术的景观石重建技术
2016-06-27张西童吴珍珍李丽雪
毛 杰,张西童,吴珍珍,李丽雪
(河南理工大学测绘学院,河南焦作454000)
基于三维激光扫描技术的景观石重建技术
毛 杰,张西童,吴珍珍,李丽雪
(河南理工大学测绘学院,河南焦作454000)
摘 要:以获取某校景观石的三维激光扫描点云为实例,解决在三维激光扫描过程中由于环境因素、信号干扰等产生点云噪声的问题,并对点云拼接、点云滤波、模型重建等方面进行探讨;对基于点云数据建立的模型进行影像纹理映射的研究,并对在纹理映射中出现的各种问题进行探讨与解决,总结出一种从点云数据的采集到建立具有真实感的三维模型建模方法。使用RiSCAN pro,Geomagic Stdio 11逆向工程软件以及3ds Max软件进行处理和解决,最终实现了复杂表面物体的三维模型重建。实验结果表明,文中方法能够快速准确地处理三维激光扫描仪所获取的点云数据,对实现复杂表面物体快速三维可视化模型重建具有一定实用性。
关键词:三维激光扫描技术;点云数据处理;纹理映射
三维激光扫描技术作为一种新兴的全自动高精度现代测量技术,具有效率高、成本低、适应性强、信息量丰富以及能够快速获取地表实体三维信息等特点,成为空间数据获取的重要手段,从而在模型重建中得到广泛应用。国内外相关研究主要有:Hoppe提出了利用无结构点云数据精确地实现分段光滑曲面的自动重建方法,该方法分为初始曲面估计、格网优化和分段光滑曲面优化3个阶段[1]。李永强等人运用地面型三维激光扫描仪完成了洛阳白马寺齐云塔三维表面重建工作,并根据观测结果精确计算了齐云塔的中心偏移参数,为以后该寺古建筑的保护与修复提供了强有力的数据支持[2]。霍春燕等人主要研究了基于数字摄影测量工作站,并以航空立体像对为基础进行城市三维建模数据的采集方法[3]。邱俊玲等人以内蒙古白音诺尔铅锌矿为例,对基于三维激光扫描技术的矿山地质建模与应用进行探讨,可为覆盖区矿产综合预测提供3D矿床模型以及预测要素空间形态特征等方面提供参考[4]。张玉红等人以Skyline为平台,C#为开发语言建立城市三维管线系统,明确了地下各个管线的空间位置关系,实现了管线的查询和分析功能[5]。侯飞等人以徐州市狮子山楚王陵为例,实现了基于三维激光扫描技术的古陵墓的可视化,构建了精准的古陵墓三维景观模型[6]。在以往三维模型重建研究中,由于数据源的限制,直接制约了所获取对象数据的完整度,使得在三维建模工具如Auto-CAD、3dsMax等建模软件在建立精细不规则模型时不仅耗时,而且不易实现对目标的精细建模,而三维激光扫描技术的出现和发展能够较好地解决该难题。本文以地面型三维激光扫描系统Riegl VZ-1000所获取某高校的测绘学院门前景观石的激光扫描数据为研究对象,对模型重建过程中点云拼接、点云滤波、构建三角网以及纹理映射及其渲染等关键性技术进行了探究,实现了景观石的精细模型重建。
1 三维模型重建技术路线
利用三维激光扫描系统建立的具有真实感的实体三维模型,其工作流程主要包括:实体扫描、点云数据预处理以及三维表面模型构建三方面内容。本文以地面型三维激光扫描系统Riegl VZ-1000所获取某高校测绘学院门前景观石的激光扫描数据为研究对象,详细分析了在测量中由于环境因素、信号干扰等产生的点云噪声点去除问题,对点云拼接、三角网生成、模型重建以及基于影像信息的点云数据模型纹理映射等技术进行了探讨,最终实现复杂表现物体的三维重建,具体技术路线如图1所示。

图1 技术路线图
1.1点云数据采集
在利用三维激光扫描仪对目标对象进行点云获取的过程中,容易受到扫描仪场景大小以及视场角的制约,通过一次扫描往往不能获取完整目标点云数据,这就需要根据目标对象形状大小以及复杂程度,合理放置标靶并从不同角度进行多站点扫描,从而获取多组重叠扫描数据。在进行扫描之前需要制定详细的扫描方案,主要包括扫描目标的特点以及精度要求,同时在架设扫描仪时需要架设在视野开阔、遮挡物比较少的地方,保证架设最少的站数达到获取最完整的点云数据。
本文以某高校测绘学院门前的景观石为实验研究对象,采用Riegl VZ-1000三维激光扫描仪进行点云数据采集的实验。根据制定的方案在景观石周围放置4个标靶,架设3站完成观测。为了能够实时观察检验数据的完整性,防止出现数据的大面积缺失导致建模精度损失的现象发生,在采集过程中配合使用了RiSCAN pro软件。
1.2点云数据预处理
1.2.1多视角对齐
由于进行了3站扫描,因此,需要将3组扫描数据结果进行对齐、拼接。点云对齐、拼接可以通过在物体表面布设同名控制点来实现,基本原理为设在P,Q两个视角下获得的具有部分重叠区域的测量数据点分别为相对应的数据点集,若在数据点集P中提取一个子集{mi|mi∈P,i=1,2,…,N},在数据点集Q中有一子集{m′i|m′i∈Q,i=1,2,…,N}与之各点对应,配准就是求解在两个不同视角(坐标系)下,三维数据点之间的坐标转换关系R和T,其中R为旋转矩阵,T为平移矩阵,使得目标函数达到最小化,即多视对齐的实质是计算满足如下目标函数的旋转和平移变换矩阵

其中pi,qi为需对齐的点。
通过上述原理分析可知,为了实现目标对象的完整点云数据,需要将扫描的各测站扫描的点云数据进行配准,实现独立坐标系的统一。目前,在实现激光扫描点云数据的配准方式主要分为:①基于标靶的拼接,即基于扫描前设置的标靶数据进行拼接;②基于测站点的拼接,即基于测量点标靶的三维坐标进行拼接;③基于点云的拼接,即没有设置标靶时可以采用同名点云的方法进行拼接;④混合拼接,即同名点标靶数量不足3个,可以采用同时基于标靶和点云的拼接。因此,为了提高拼接精度,本文采用混合拼接方式,通过3个同名标靶以及每站重叠区域的同名特征点云在3组不同点云坐标中求取转换系数,再将按照式(1)将3组点云数据转换到统一坐标系下。由于本文数据采集方案是按照任意点设站的方式进行采集,3组点云没有统一的坐标系,本文就将基准坐标设置为第1站标靶,将2、3站分别与1站进行配准,该过程需要在RiSCAN pro完成,最终拼接结果达到1.5mm,满足精细建模要求,拼接结果如图2所示。

图2 拼接后的景观石点云
1.2.2点云去噪
在模型重建过程中,冗余的点云数据以及噪声点直接影响着建模的效率和精度。然而在数据采集的环节中,容易受到周围环境中诸多因素影响而产生噪声点;在点云拼接中,通过多站点云数据配准实现了点云坐标系的统一,但是容易产生冗余数据和噪声点。因此,为提高三维模型重建的效率以及模型精度,需要对所采集的点云数据进行去噪处理,即对拼接完成的点云滤除噪声点及孤立点,有效保留研究对象点云[7]。由于景观石表面不规则,包含的噪声点云数据量相对较大,在进行手动去除比较明显的噪声点的基础上需要结合Geomagic Stdio 11做进一步的噪声点滤除,这样保证了点云数据更加平滑,保证了后期建模的精度。
1.2.3点云数据重采样
通过噪声去除处理之后,数据量在一定程度上得到了减少,但是针对三维模型重建方面,仍然存在着大量的冗余数据,直接影响着后期模型重建的效率。针对上述问题需要对点云数据进行重采样进行简化,常用的方法主要有2种:①平均精简,原点云中每N个点保留1个;②按距离精简,删除一些点后的点云中点与点之间的距离均大于某值。在对原点云进行重采样的过程中需要对点云密度进行限定,如果重采样点密度过大容易造成后期三角网生成过多,不利于三维建模效率;点密度过于稀疏则容易在建模丢失部分细节,因此,在进行点云数据重采样时需考虑到建模精度,在保障模型精度的程度上设置合理阈值,达到点云数据量最少。
2 三维表面模型构建
在点云数据处理环节中,三维表面模型重建是精细建模的核心环节,通过精细建模、纹理映射以及模型渲染,能够使得景观石外观和形态得以重现,为后期景观石特征变化分析提供重要数据支持,因此,基于点云数据的景观石建模方法探究具有深刻的意义。
1)构建三角网模型。点云数据是由大量不规则的离散点构成,而构建三角网模型能够将不规则离散点云形成被测对象的实际表面,构建三角网是一种实用而且简单的方法,而且能够体现出对象真实表面的拓扑关系。图3为封装生成的模型三角网。
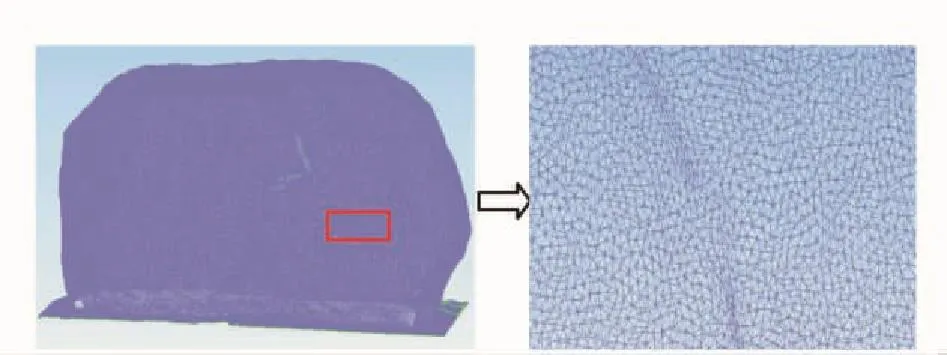
图3 模型三角网
2)填补数据空洞。在数据采集中由于被测模型本身几何拓扑原因或因遮挡效应、破损以及在数据预处理阶段的不同站之间点云数据拼接存在缝隙等原因,会存在部分表面无法测量、采集的数字化模型存在数据破损现象,无法构成三角网模型,需要进行数据填补,保证对象的形态结构的完整性。
3)三角网的简化。数量过大的三角网直接制约着后期模型重建的效率,因此,在不影响景观石特征的前提下,需要对三角网简化调整,在试验中,需要在Geomagic Stdio 11逆向工程软件中进行简化调整,先删除生成的非流形三角形,然后对不同的孔洞进行分类填充,对数据缺失部分根据周围曲率进行拟合填充。在该环节需要注意为了避免模型发生失真变形,采用基于曲率优先的原则,删除相对比较平坦区域的点云,保留高曲率部分的点,将三角形数量减少为原来的80%。
4)形状处理阶段。主要是轮廓线处理、曲面片处理以及网格处理3项工作。在提取和编辑对象轮廓线过程中,可以采用自动提取和手工提取,但是需要严格保证被测对象的自然特征。曲面片处理包括曲面片的构建和修理,轮廓线是构建曲面片的基准线,曲面片所形成的包围线是以轮廓线为基础进行扩展。曲面片的构造是为了生成网格,因此,为了保证网格的准确性,需要对构造的曲面片过程中出现的错误面片进行修理,直到曲面片完全正确为止。为了达到理想的曲面要求,需要不断进行修改不理想的曲面。在网格生成完成之后,基于每个曲面片进行曲面拟合,生成NURBS曲面[8]。
5)纹理映射。原始灰度图三维模型不具有逼真性和现实性,在灰度图上增加纹理可以使其成为具有纹理属性的三维模型。根据物体材质或自然常识对物体设置一定颜色或对其贴合一定自然纹理,可以增强物体真实感。纹理意义可简单归纳为将特定的数据集(如颜色、亮度)映射到一个三维模型表面。实际上纹理映射的过程存在2种映射关系,一是从纹理坐标系到物体坐标系的映射;二是从物体坐标系至视口坐标系的映射[9]。
在本次实验中,获取点云数据信息和同步内置数码相机获取的影像信息对已经建立的三维模型进行纹理细节描述,实现可视化显示,如图4所示。其流程主要分为3部分:①对景观石三维模型进行投影变换;②选取对应点,将二维纹理图像的像素信息赋予相应的三维数据点;③通过计算,将3个顶点颜色平均值赋予此三角面片,将模型转化为可编辑的多边形进行各个面的贴图和渲染,得到包含颜色纹理信息的三维模型[10-11]。

图4 初步纹理映射图
但是这样得到的模型存在一定问题,本文采取了相应的解决方案:
1)由于采用中心投影方式,使得照片变形导致纹理与实际位置出现偏差,解决方法是需要采用正视投影图进行贴图。
2)由于获取照片各个面的亮度不一致从而造成各个部分色调不和谐,解决方法是进行初步的校正使颜色在视觉上达到一致。
3)模型上存在小范围数据缺失,解决方法是采取模型上相似部分的纹理进行贴图。
4)图形分辨率有限而造成的纹理拉伸现象,解决方法是删除这部分纹理,重新进行实地采集纹理,从模型表面法线方向上进行贴图。
经过以上方法,最终实现具有真实感的复杂三维表面模型,如图5所示。
3 结束语
综上所述,本文以某校测绘学院景观石为实验对象,详细阐述了三维激光扫描技术在三维精细模型重建领域的应用,本文采用的方法能基本上实现了高仿真、高精度模型重建,所建立模型能够保证工程需要。但是在模型重建过程如何减少点云拼接产生的误差、实现点云降噪自动化,保证数据完整性和精度,提高特征提取的自动化以及构网建模效率,以及防止纹理映射造成的模型变形等仍是今后的重点研究方向。
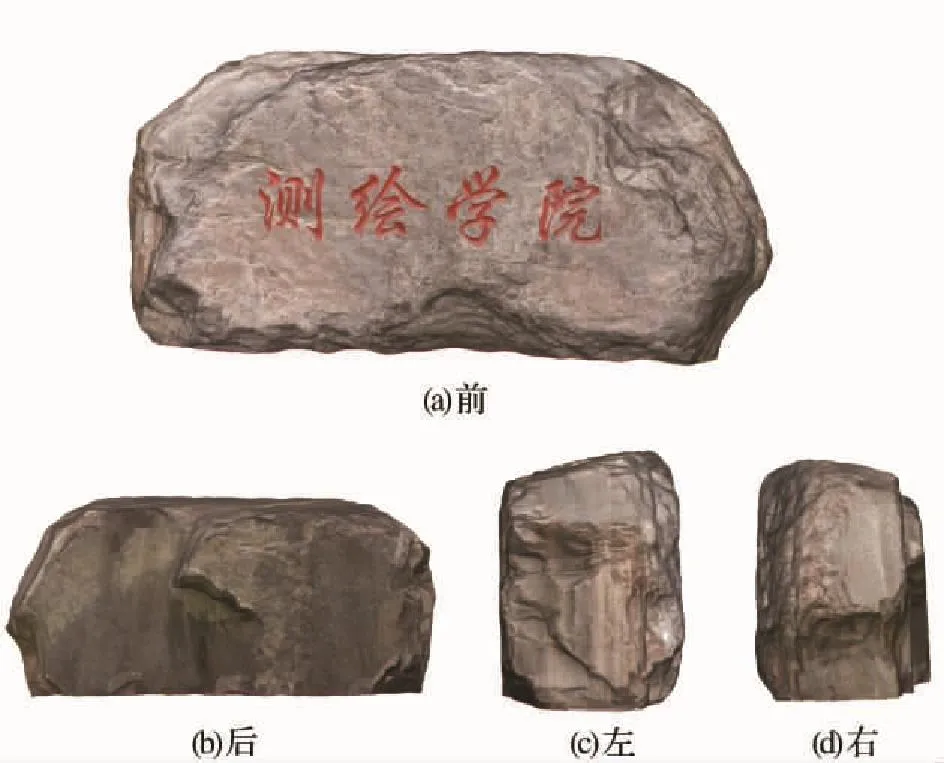
图5 最终渲染效果图
参考文献
[1] HOPPE H.Surface Reconstruction from Unor-ganized Points[D].PhD Dissertation of the University of Washington,1994.
[2] 李永强,刘会云,冯梅,等.大型古建筑文物三维数字化保护研究——以白马寺齐云塔为例[J].河南理工大学(自然科学版),2012,31(2):186-190.
[3] 霍春玲,刘达.城市三维建模数据采集方法研究[J].黑龙江工程学院学报(自然科学版),2007,21(4):20-23.
[4] 邱俊玲,夏庆霖,姚凌青,等.基于三维激光扫描技术的矿山地质建模与应用[J].地球科学,2012,37(6):1210-1216.
[5] 张玉红,任东风,贲忠奇,等.基于Skyline的城市地下三维管线建立研究[J].黑龙江工程学院学报(自然科学版),2015,29(2):35-40.
[6] 侯飞,胡召玲,刘晴.基于三维激光扫描技术的古陵墓可视化[J].测绘工程,2013,22(5):78-81.
[7] 刘春,杨伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察,2006(4):49-53.
[8] 曾静,李陶深.基于样图的纹理合成在三维点模型上的实现[J].广西大学学报(自然科学版),2010,35(5):807-811.
[9] 仇兵.面向三维激光扫描的真实感纹理映射技术研究[D].南京:南京理工大学,2009.
[10]王明宇.基于实拍照片的纹理映射研究[D].沈阳:沈阳理工大学,2010.
[11]程思源,谢韶旺.Geomagic Studio逆向工程技术及应用[M].北京:清华大学出版社,2010.
[责任编辑:刘文霞]
The model-based reconstruction based on 3Dlaser scanning technology
MAO Jie,ZHANG Xitong,WU Zhenzhen,LI Lixue
(School of Surveying and Land Information Engineering,Henan Polytechnic University,Jiaozuo 454000,China)
Abstract:This paper,taking a school landscape stone 3Dlaser scanning point cloud as an example,aims to solve the 3Dlaser scanning process due to environmental factors and signal interference,and discusses the point clouds noise problems,point clouds registration,point cloud filtering aspect,and model reconstruction.Based on the model established by point cloud data for image texture mapping study,it explores and solves the emerging problems in the texture mapping and sums up a collection point cloud data from a 3Dmodel to a realistic modeling method.RiSCAN Pro Geomagic Studio 11reverse engineering software and 3ds Max software are used to handle and resolve to ultimately realize the 3D surface reconstruction of complex objects.Experimental results show that this method can quickly and accurately process point cloud data to obtain a 3Dlaser scanning.The realization of complex 3Dsurface of the object 's rapid visualization model has a certain practicality on reconstruction.
Key words:3Dlaser scanning technology;point cloud data processing;texture mapping;scalingfactor
中图分类号:P258
文献标识码:A
文章编号:1671-4679(2016)02-0012-04
收稿日期:2015-11-13
作者简介:毛 杰(1986-),男,硕士研究生,研究方向:三维激光扫描技术.
