基于遗传算法的某工程车辆起步特性研究
2016-06-27田晋跃王晨阳李得志
田晋跃, 王晨阳, 李得志
(江苏大学 汽车与交通工程学院 江苏 镇江 212013)
基于遗传算法的某工程车辆起步特性研究
田晋跃, 王晨阳, 李得志
(江苏大学 汽车与交通工程学院 江苏 镇江 212013)
以某型工程车辆为研究对象,对其起步特性进行研究,分析并建立了起步过程的动力学方程.在此基础上,利用Matlab/Simulink建立起步过程仿真模型.针对各种工况下的起步过程,进行了模拟仿真;并综合离合器离合速度、油门开度等因素对起步时间、整车冲击度以及滑摩功的影响进行了分析.利用遗传算法,对离合器结合过程的摩擦转矩曲线进行了优化;利用PID(proportion integration differentiation)控制器对起步过程离合器液压系统进行控制,优化起步品质,改善起步性能.
Matlab/Simulink; 遗传算法; PID控制; 起步特性
0 前言
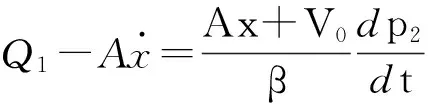
某工程车辆,6个离合器内置于变速器内部(图1),通过液压控制6个离合器结合或分离,实现不同状态的组合,构成不同档位,将发动机传来的动力传递给驱动桥.与普通车辆相比,该工程车辆起步时离合器C1和C2分别结合,通过对C1和C2供油参数的合理调整,不仅可实现换挡平顺、乘坐舒适,还能达到较高的传动效率.但由于离合器C1主动端与发动机飞轮输出端相连,结合时主、从动端转速差较大;而离合器C2主、从动端转速从零开始增加,因此存在离合器C1、C2滑摩不均的问题.
评价车辆起步品质的性能指标是冲击度和滑摩功.起步控制的关键是使这两个相互矛盾的指标达到平衡.车辆起步的控制目标是在保证离合器接合平稳的前提下,尽量减少离合器产生的滑摩功和冲击度.
本文利用遗传算法对离合器油压变化规律进行优化,得到起步最优油压曲线,采用PID控制器对离合器液压系统进行精确控制,优化起步品质,改善起步性能.
1 离合器液压控制模型
1.1 离合器压力控制模型


式中:ca为高速开关阀的流量系数;Ap为高速开关阀的节流面积;ρ为液压油的密度;C1为电磁换向阀的流量系数;A1为电磁换向阀的节流面积.
1.2 离合器活塞运动模型
忽略离合器液压缸和油路的漏损,假设充油过程中压力油温度不变,根据流体力学理论[3],在第一阶段离合器活塞运动过程中,离合器液压缸的流体连续性方程为:
式中:Q1为离合器液压缸液压油输入流量;β为压力油有效体积弹性模量;p2为离合器液压缸压力;A为离合器液压缸作用面积;V0为离合器液压缸初始体积和供油管路体积总和.
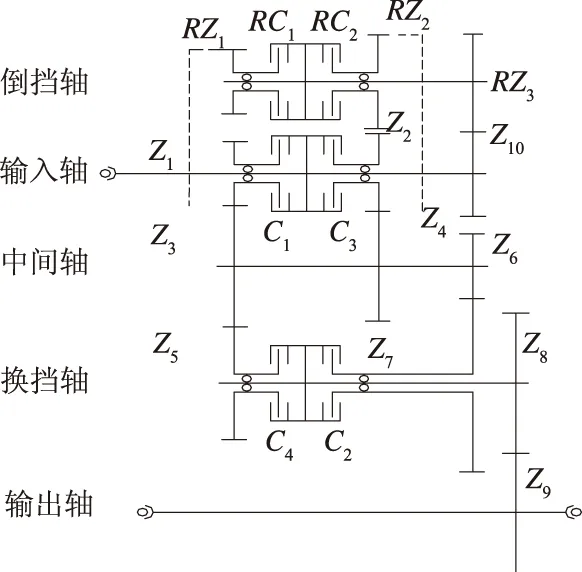
图1 变速器传动简图Fig.1 The gearbox transmission system diagram

图2 离合器压力控制模型Fig.2 The hydraulic pressurecontrol system of clutch
2 车辆起步模型
2.1 发动机模型
发动机转矩特性数据由试验所得.该工程车所装的康明斯M11-C225H型柴油发动机的实验数据如图3所示.考虑到发动机的动态作用,其输入为节气门开度和发动机转速.发动机工作时的方程为:
式中:Te为发动机转矩;Ie为发动机转动惯量;Ic1为离合器主动部分的转动惯量;ωe为发动机曲轴角速度;Tc1为离合器的输出转矩.
2.2 离合器结合模型
图3 发动机稳态输出转矩特性图
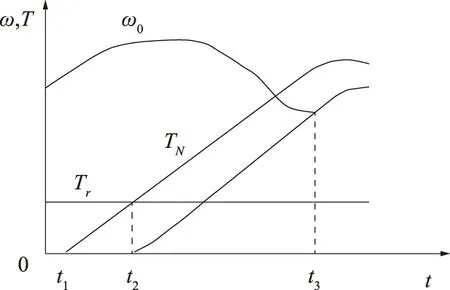
图4 离合器接合过程
离合器的接合过程如图4所示, 离合器受压开始工作,首先消除主、从动摩擦片之间的空隙 ,随着离合器活塞压力的不断增加,主、从动摩擦片开始接触,离合器摩擦面之间所传递的转矩不断增加并克服阻转矩带动从动盘旋转直至主、从动盘转速一致.在离合器控制过程中,离合器所能传递的力矩的大小是通过控制离合器摩擦片上的压力来调节的,其传递转矩Tck为:Tck=nμdRcFA,式中:μd为摩擦片的动态摩擦系数;FA为离合器活塞作用力;n为离合器摩擦副数量;Rc为离合器当量摩擦半径.
2.3 整车动力模型
整车(见表1)作为一个整体,是一个多自由度系统车辆在行驶过程中所受的阻力包括滚动阻力、坡度阻力、空气阻力.车辆在行驶时的受力方程为:
式中:m为整车质量;f为车轮滚动阻力系数;γ为坡度角;CD为空气阻力系数;S为迎风面积;ν为车速;δ为车辆旋转质量换算系数.

表1 整车及其他参数
3 起步品质及其评价指标
通常情况下,工程车辆使用冲击度、滑摩功来评价其起步性能[4].
1) 冲击度用于评价换档过程的平稳程度,指车辆纵向加速度的变化率.车身加速度变化率越小,冲击度的峰值就越小,乘员的感觉越舒适[5].其数学表达式为:

式中:a为车辆纵向加速度;v为车速.
2) 滑摩功为离合器接合过程中,离合器摩擦片滑摩消耗的机械能所转化的热能[6].离合器滑摩过程中,会产生大量热量;如果散热不及时,将导致离合器摩擦元件性能及其摩擦系数等发生改变,甚至引起离合器工作性能失效.滑摩功的数学表达式为:

式中:Tc为离合器主、从动片间摩擦转矩;t为离合器主、从动片转速达到相等所经历的时间;ωc_in为离合器主动部分转速;ωc_out为离合器从动部分转速.
4 基于遗传算法的起步参数优化
遗传算法是一种全局寻优算法,利用目标函数在概率准则引导下进行全局自适应自动搜索,其寻优效率高、鲁棒性强、适用性广.因此本文采用遗传算法优化方法对离合器油压变化规律进行优化,得到起步最优的油压曲线.并采用PID控制器对离合器液压系统进行精确控制,分析不同工况下车辆的起步性能.
根据国外对自动变速器油路的大量试验分析,在离合器结合、分离过程中,离合器摩擦力矩的变化曲线基本上符合指数函数形式[7].对于起步过程来说,只涉及到离合器接合过程的力矩变化,离合器C1、C2的摩擦力矩曲线为[7-8]:
Tc1=Tc1_max[1-exp(-k1t)],Tc2=Tc2_max[1-exp(-k2t)],
式中:Tc_max为一定主油压力下离合器所能传递的最大摩擦转矩;k1、k2为与离合器油路充油速度有关的系数.


定义g3=∫0tJ2dt作为评价整个起步过程的冲击度指标.
为了综合考虑冲击度、滑摩功以及滑摩功在两个离合器C1、C2上的分布,定义:

式中:g为换档品质综合性能系数;λi为冲击度指标和滑摩功指标权重系数(i=1,2,3).
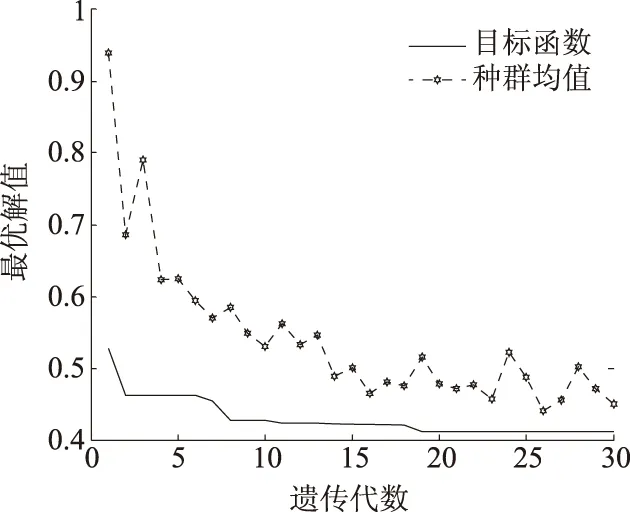
图5 种群均值与最优解变化Fig.5 Population mean and optimal solution curves
以g为目标函数和适应函数,以离合器摩擦转矩公式的参数k1、k2为设计参数,利用遗传算法进行参数的优化.种群规模设为60,最大遗传代数设为30,交叉概率设为0.9,变异概率设为0.05;k1、k2下限值设为2,k1、k2上限值设为6.
1) 空载工况下设置发动机油门开度在30%,初始转速设为900 rpm,道路阻力系数设为0.028,仿真时间为3 s.综合考虑冲击度与滑摩功以及滑摩功在两个离合器C1、C2上的分布,设置权重系数λ1=λ2=0.3,λ3=0.4.优化结果为k1=4.663 0,k2= 4.218 0.种群均值和最优解如图5,可知,优化求解过程中,最优解收敛于0.41.由于产生了新种群,种群的差异性造成了较大波动,但不影响最优解的获得.
2) 同样的方法,在负载工况下设置油门开度为50%,初始转速设为1 100 rpm,道路阻力系数设为0.056,仿真时间设为3 s,设置权重系数λ1=λ2=0.3,λ3=0.4,对k1、k2值进行优化.优化结果为k1=5.431 9,k2= 4.617 3.
5 基于PID控制起步过程仿真
PID控制器的核心问题是控制参数的选择,包括比例常数Kp、时间常数Ti、微分时间常数Td.由仿真测出τ=0.2,K1=20(离合器C1),K2=60(离合器C2).由于该系统控制对象为液压系统,选取PI控制器,根据Z-N规则,
Kp1=0.9T/K1τ=0.099;Kp2=0.9T/K2τ=0.033;Ti=τ/0.3=0.833;Td=0.其中:τ表示延迟时间,K1、K2表示阶跃最大值.
以遗传算法所优化的理想摩擦转矩和离合器实际摩擦转矩的偏差为输入量,通过PID控制器控制高速开关阀占空比进而控制离合器C1、C2的活塞油压,达到控制离合器接合过程的摩擦转矩的目的.考虑起步过程的驾驶意图和路况信息,在Matlab/Simulink下建立仿真模型,对不同工况下进行仿真分析,比较优化前后的起步过程.
1) 工程车辆在空载工况下起步,道路阻力系数设为0.028,发动机油门开度设为30%,初始转速设为900 rpm;k1、k2分别为4.663、4.218;仿真时间设置3.5 s.
图6表示空载下离合器C1主从动片转速曲线,可以看出,优化前起步时离合器主动端转速约为750 rpm;从动片转速从零开始增加,有0.6 s的迟滞;在1.7 s主、从动端转速达到一致.优化后起步时从动片转速在0~0.2 s有一定迟滞;在1.2 s主、从动端转速达到一致.
图7表示离合器C2的主、从动片转速曲线,可以看出,优化前两条曲线几乎完全重合,转速曲线在0~0.6 s有一定迟滞.优化后主、从动片转速有了一定的转速差;滑摩持续时间比较长,在3.2 s时完成结合.
图8~9分别表示滑摩功和整车冲击度曲线,优化后离合器C1滑摩功约为6 000 J,为优化前的一半,离合器C2滑摩功约为4 100 J,较优化前降低8 000 J;整车冲击度最大值为9 m/s3,之后冲击度曲线趋于平稳.
2) 工程车辆一定负载工况下起步,将道路阻力系数设为0.056;发动机油门开度设为50%,初始转速设为1 100 rpm;k1、k2分别为5.431 9、4.617 3;仿真时间设置3.5 s.

图10表示负载下离合器C1主从动片转速曲线,可以看出,优化前起步时离合器主动端转速约为950 rpm,在2.4 s主、从动端转速达到一致,与空载相比,起步时离合器主动端转速有所增加,且离合器接合时间增加了约0.7 s.优化后起步时从动片转速有0.2 s的迟滞;在2.0 s主、从动端转速达到一致.
图11表示负载下离合器C2的主、从动片转速曲线,与优化前的图7对比,大致相同.优化后主、从动片转速有了一定的转速差;滑摩持续时间比较长,在2.9 s时完成结合.
图12、13分别表示滑摩功和整车冲击度曲线,可以看出,优化后离合器C1滑摩功约为13 000 J,而离合器C2滑摩功约为9 000 J;整车冲击度最大值为9 m/s3.

6 结论
通过对比,可以看出经过优化之后:
1) 起步工况下,离合器C1、C2均结合更快;离合器C1滑摩功明显降低,同时离合器C2也产生一定的滑摩功;起步过程的滑摩状况得到了明显改善.
2) 冲击度出现了较大峰值,之后冲击度曲线趋于平稳;总体上冲击度有所改善.
3) 随着负载的增加,起步过程所产生的滑摩功也随之增加.
[1] OST W,DE BAETS P,DERIECK J.The tribological behavior of paper friction plates for wet clutch application investigated on SAE#Ⅱ and pin-on-disk test rigs [J].Wear,2001,249:367-371.
[2] CROWTHE A,ZHANG N,LIU D K,et al.Analysis and simulation of clutch engagement judder and stick-slip in automotive powertrain systems [J].Drive system technigue,2008,22(3):38-48.
[3] 马彪.履带车辆综合传动特性的动态仿真研究(直驶)[D].北京:北京理工大学,1999.
[4] 高建平,李晓林,郭志军.改进型混合动力汽车工况预测算法的应用仿真[J].河南科技大学学报(自然科学版),2013,34(2):34-38.
[5] CENTEA D,RAHNEJAT H,MENDAY M.Non-linear multi-body dynamic analysis for the study of clutch torsional vibrations(judder) [J].Applied mathematical modelling,2001,25(3):177-192.
[6] 金伦,程秀生,葛安林,等.AMT换档过程的离合器控制 [J].汽车技术,2006(1):11-13.
[7] 周凡华.汽车自动变速器(AT)换档品质研究 [D].上海:同济大学,2004.
[8] 杨伟斌,吴光强,秦大同.双离合器式自动变速器传动系统的建模及换档特性 [J]. 机械工程学报,2007,43(7):188-194.
(责任编辑:王浩毅)
A Study on Start Characteristics of an Off-road Vehicle Based on Genetic Algorithm
TIAN Jinyue, WANG Chenyang, LI Dezhi
(SchoolofAutomobileandTrafficEngineering,JiangsuUniversity,Zhenjiang212013,China)
The starting characteristic of a certain type of vehicles was studied. Based on the analysis and establishment of the dynamics equation of the starting process, a simulation model of starting process was established by Matlab/simulink. The starting processes were simulated on various conditions. Combined with clutch speed and throttle opening, the influence to the starting time, the vehicle jerk and slipping work was analyzed. Then by using the genetic algorithm, the friction torque curve was optimized in the clutch binding process. By PID controller to control the start process with hydraulic system of clutch, and the start quality was optimized, and the start performance was improved.
matlab/Simulink; cenetic algorithm; PID control; start characteristic
2015-10-04
田晋跃(1958—),男,山西孝义人,教授,主要从事传动与液压研究,Email:tianjinyue@ujs.edu.cn.
田晋跃,王晨阳,李得志.基于遗传算法的某工程车辆起步特性研究[J].郑州大学学报(理学版),2016,48(2):121-126.
U270
A
1671-6841(2016)02-0121-06
10.13705/j.issn.1671-6841.2015206
