一种Mecanum轮式移动平台增量PID控制系统设计
2016-06-22李世光申梦茜王文文高正中
李世光,申梦茜,王文文,高正中
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
一种Mecanum轮式移动平台增量PID控制系统设计
李世光,申梦茜,王文文,高正中
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
摘要:为保证移动平台在复杂环境中具有良好的动态响应特性,设计了一种以STM32F405单片机为控制核心,基于Mecanum轮的全方位移动平台。采用基于Mecanum轮的H桥驱动电路,利用大电流、低阻抗的MOS管提高电机的驱动能力, 应用LM2903,LMV611实现过电流、过电压保护功能;利用增量式PID控制策略,抑制电机启动电流,改善动态性能;将采集的视频信息通过无线图传发送给控制台,利用遥控器对移动平台进行实时控制。测试结果表明,移动平台运动灵活,越障能力强,实时性和可控性满足项目设计要求。
关键词:STM32F405;Mecanum轮;移动平台;增量式PID
工作空间狭窄、地形复杂的场所对轮式运转设备的灵活性、通过性以及环境的适应性等性能有很高的要求,例如地表探测、地震救灾现场或设备密布的车间等。基于Mecanum轮的移动平台可以在狭小的工作空间内灵活地实现三自由度运动,使平台整体在姿态保持不变的情况下,沿任意路径到达目标位置,能够很好地完成项目要求[1]。
国内不少文献对Mecanum轮的控制进行了研究,如文献[2]模糊滑模轨迹跟踪控制算法在Mecanum轮全方位移动平台的应用,文献[3]四轮全方位系统的运动性能分析及结构形式优选,文献[4]基于SimMechanics 模型的 PID(proportion integral derivative)控制等,但上述研究均侧重于Mecanum轮模型分析和控制算法的研究。本设计将Mecanum轮技术工程化,重点分析基于STM32的控制系统和增量式PID调速性能。
1系统硬件结构
全方位移动平台控制系统主要由STM32F405微处理器、直流电机驱动模块、电源模块和无线通信等模块构成。系统框图如图1所示。遥控器通过无线通信模块与STM32处理器通信,传输控制命令。处理器收到控制直流电机命令时,给直流电机输出PWM(pulse width modulation,脉宽调制)信号,通过调节4个Mecanum轮的转向和速度实现平台的全方位变速移动[5]。

图1 系统框图
2主要模块设计
2.1主控模块
平台控制系统选用STM32F405作为处理器,该芯片使用高性能ARM Cortex-M432位RIRS内核,工作频率高达168 MHz,15个I/O端口(3个I2C接口,4个USART接口,3个SPI接口等)用于连接外部设备,并集成了2个DAC、3个ADC、定时器、实时时钟、CRC计算单元和模拟随机数发生器等在内的整套先进外设。处理器通过4个PWM定时器驱动平台4个直流电机,1个ADC用于H桥输出电流的过流保护,2路通信接口分别用于遥控器接收输入和调试等。
2.2Mecanum轮平台电机驱动模块
根据机器人响应速度快、越障能力强的要求,设计了一种H桥驱动电路,实现对全方位平台的运动速度和方向的控制(图2)。H 桥的2个上臂选用电流为74 A,导通阻抗为175.0 mΩ的P 沟道MOSFET IRF4905,2片TLP250作为MOS管栅极驱动芯片;2个下臂选用大电流(110 A)、低阻抗(8.0 mΩ)的N沟道MOSFET IRF3205,其驱动芯片选用IR4426。H 桥电路输出额定电流达40 A,满足平台快速加减速时对电机的驱动控制要求。通过调节STM32F405输出的4路PWM波的占空比,实现对4个直流电机的调速,从而控制4个万向轮的转速,完成平台在平面的全方向移动。
H 桥电路可以方便地实现电机正反转控制,如电机正向转动,BG1 和BG4 导通,此时BG2 和BG3 截止。反之,BG2和BG3 导通,BG1 和BG4 截止[6]。控制时序如图3所示。
图4是平台左前轮电机的逻辑输出驱动电路。假设PWM输出端、单片机引脚PB11、PB12均输出高电平,PB13输出低电平,则74LS32输出高电平,74F02输出低电平。最终BG4导通,BG3关闭,BG1管导通,BG2管关闭,实现了电机的反转功能。电压比较器LM2903实现了电流过流保护,单片机的DAC输出电机过流阈值(由多次实验确定),当电机发生过流时,比较器输出高电平,封锁H桥的控制信号,同时信号被单片机捕获,进行保护处理。同时在LMV611电路接入4个0.5 Ω 的大功率电阻,实现对H 桥电路的电流检测和保护功能。
3系统软件设计
选用Keil μVision4 软件开发系统,采用C语言编程。上电后控制程序首先进行初始化,包括时钟配置,延时函数初始化、串口的初始化和定时器的初始化。系统中定时器分别用于PWM信号的产生:TIM8_CH1输出PWMA驱动左前轮,TIM8_CH2输出PWMB驱动左后轮,TIM8_CH3输出PWMC驱动-右前轮,TIM8_CH4输出PWMD驱动右后轮。通过设置4路PWM波的占空比,实现4个直流电机的调速。

图2 H桥驱动电路原理图
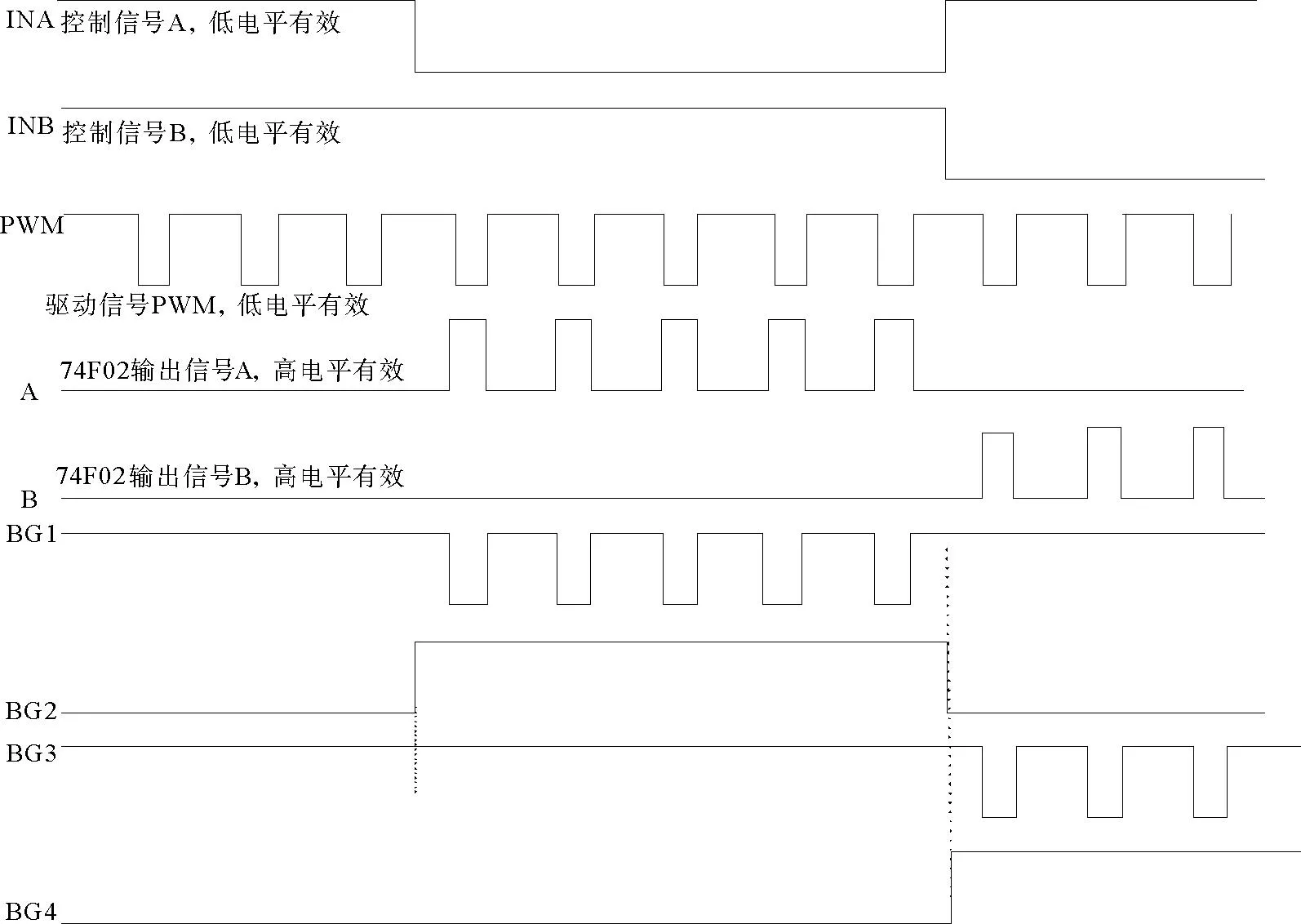
图3 控制时序图
由于场地的复杂性,移动平台的速度与路面的变化有很大关系。增量式PID调节算法数学模型简单,有着保持较小的超调和快速调节控制的优点[7],在本设计中用于电机的驱动。系统控制的对象是额定电压24 V,额定功率60 W,额定转速3 000 r/min的空心杯直流电机。通过反复调试,配置合适的PID参数,使移动平台的速度稳定性和电机的响应速度都得到较大提高。
算法的实现须兼顾运算量和微控制器的处理性能,保证控制的实时性。过程控制中,只输出相关控制量的增量Δu(k)。增量PID控制算式:
Δu(k)=u(k)-u(k-1)=kpΔe(k)+kie(k)+kd[Δe(k)-Δe(k-1)]。
(1)
其中:u(k)是第k次的全量输出,e(k)是第k次输入的偏差量。根据Δe(k)=e(k)-e(k-1)有:

(2)
综合系统的响应速度、稳定性、超调量和稳态精度对系统的影响[8],配置合适的增量PID参数kp,ki,kd,运用式(1),计算控制增量。
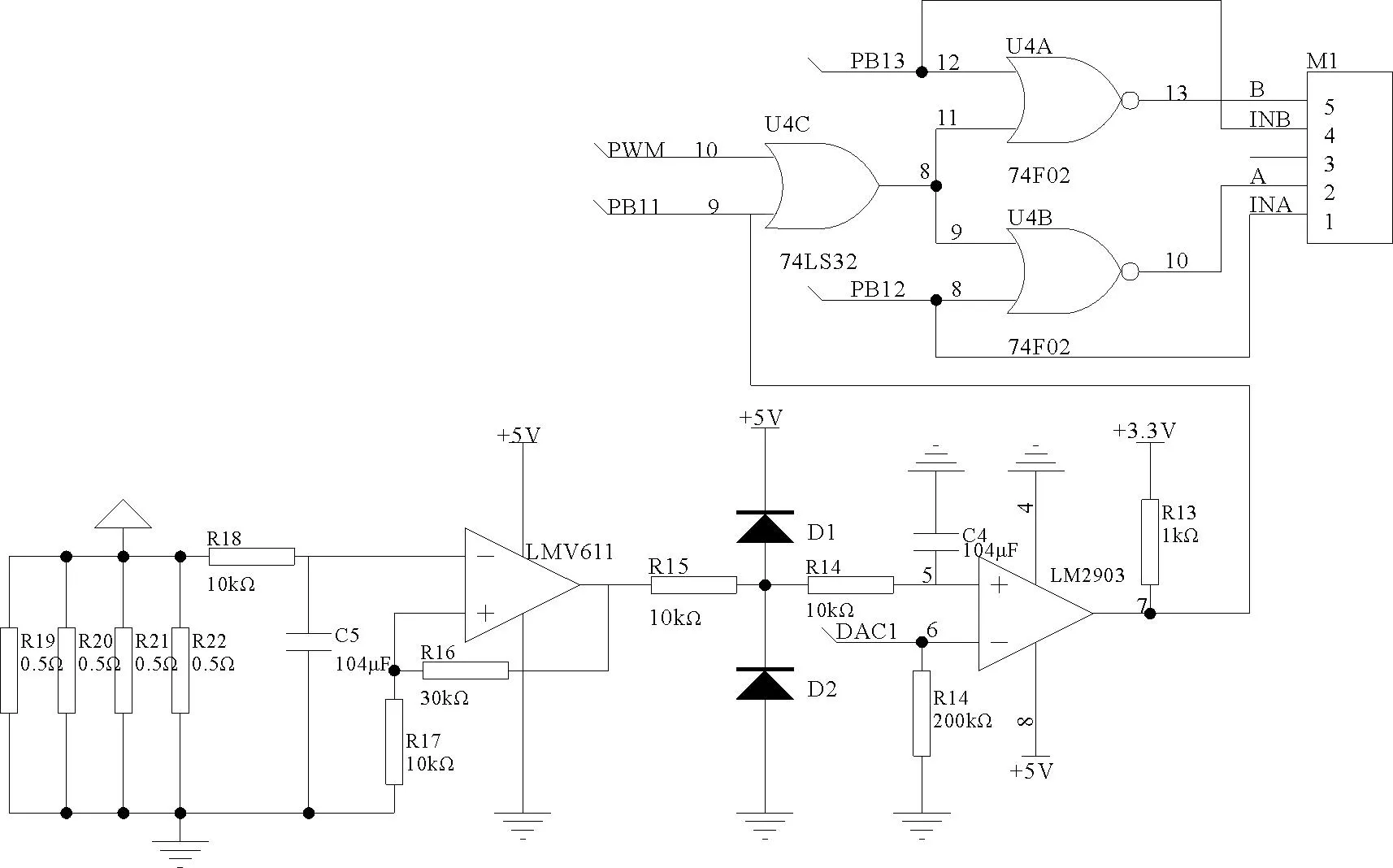
图4 底盘直流电机逻辑输出驱动电路图

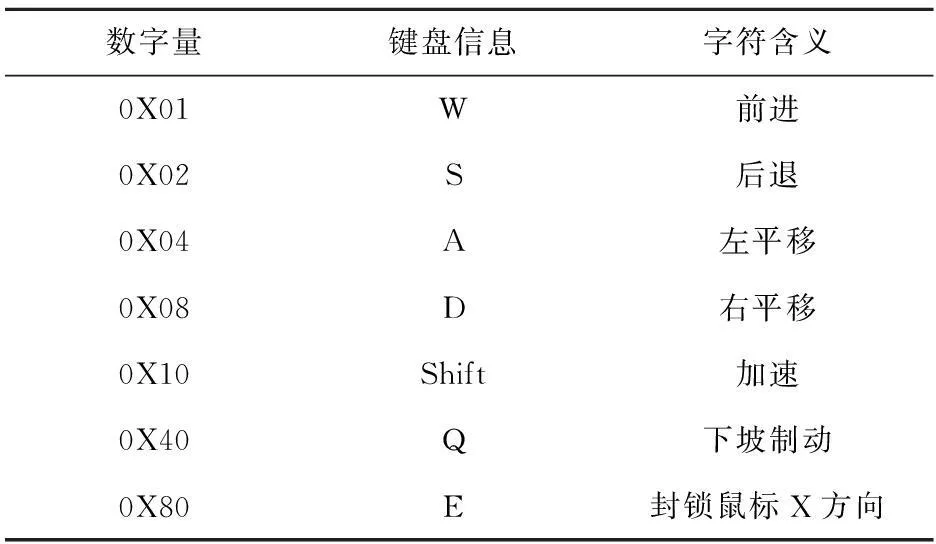
表1 键盘数字量与机器人底盘运动形式的对应关系
采用标准键盘和鼠标作为遥控器,利用无线通信模块传输控制命令[8]。本设计键盘采用的数字量与对应的字符含义如表1所示。
鼠标X轴、Y轴数字量的变化范围是-32 768~32 767,静止是0。鼠标在X轴位置时,垂直方向的数字量不变,鼠标向左滑动,数字量0~-32 768,代表平台向左转向;鼠标向右滑动,数字量0~32 767,代表平台向右转向,X轴数字量绝对值越大,平台转动角度越大。平台启动后,操作员依据图传模块传回的图像对移动平台进行实时控制。遥控器发出动作时,控制器判断是否接收到信号,若收到信号,则根据接收到的信号,判断平台应当进行何种动作,从而控制各模块的互相配合动作,最终实现平台与无线遥控器按键相对应的功能[9]。
4试验结果与分析
在完成移动平台硬件设计、样机搭建和软件开发后,在一个设有高地、陡坡、凹地等多种障碍物的面积1 000 m2场地进行测试。图5是移动平台样机。场地测试的实际效果是:平台运动灵活,在0~360°运动过程中,平台转角的最大控制误差为0.1°,且动态调节速度快,易于实现电动机的正反转切换以及高频度的起停运转,平稳可靠,能够很好地适应复杂、狭窄的环境。

图5 移动平台样机
通过设定电机的目标转速,分别对移动平台在常规PID和增量PID控制策略下的动态性能进行仿真分析。图6是平台启动时的动态响应特性曲线,实线是常规PID控制,虚线是增量式PID控制。可以看出,常规控制在0.8 s时超调量趋近于0,而增量PID控制在0.5 s时超调量已接近为0,相对于常规算法超调时间明显缩短,说明控制算法具有良好的动态响应。图7是转速控制对比图。从启动到稳定经过了3个阶段,首先遥控器按下W键(前进),增量式PID控制比常规控制早0.42 s达到预定转速,接着按下shirt加速键,采用增量PID控制的系统经0.15 s很快跟随达到最高转速,之后在3 s时突然加额定负载,电机电流上升,转速下降,系统经过0.2 s的调节,迅速回到给定值,而常规PID控制经过0.4 s接近稳定值,说明采用增量PID调节的系统平台,可以实时跟随遥控器命令,有良好的可控性。该平台成功应用在全国机器人超级对抗赛上,取得了优异的成绩。
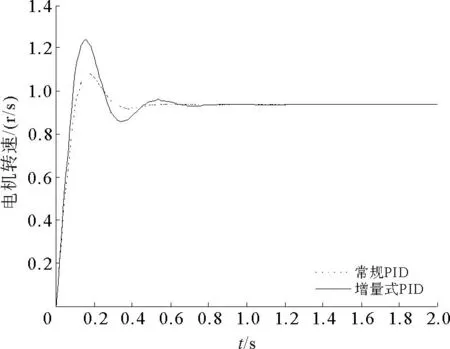
图6 平台动态响应特性
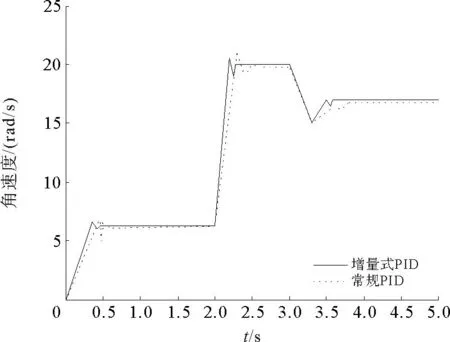
图7 Mecanum轮转速控制分析
5结论
研究了一种基于STM32F405的全方位移动平台。H桥的过流保护等功能满足了平台快速加减速时对电机的驱动控制要求。对平台在常规算法和基于增量式PID调节控制算法下的动态响应和转速控制进行仿真对比表明,增量PID控制算法不仅简化了控制思路,而且比常规PID控制更流畅,电机响应速度更快。从实际测试结果可以看出,该平台在复杂地势的环境下,电机超调量小、越障能力强,具有广阔的应用前景。
参考文献:
[1]陈楠,戴勇波.基于DSP的全方位移动平台无线遥控系统[J].计算机测量与控制,2014,22(10):3161-3164.
CHEN Nan,DAI Yongbo.Wireless remote control system based on DSP of omnidirectional mobile platform[J].Computer Measurement and Control,2014,22(10):3161-3164.
[2]王双双,张豫南,王和源,等.全方位移动平台模糊滑模轨迹跟踪控制[J].微特电机,2012,40(8):63-66.
WANG Shuangshuang,ZHANG Yunan,WANG Heyuan,et al.Trajectory tracking based on fuzzy sliding mode control for omnidirectional platform[J].Drive and Control,2012,40(8):63-66.
[3]王一治,常德功.Mecanum四轮全方位系统的运动性能分析及结构形式优选[J].机械工程学报,2009,45(5):307-310.
WANG Yizhi,CHANG Degong.Motion performance analysis and layout selection for motion system with four Mecanumwheels[J].Journal of Mechanical Engineering,2009,45(5):307-310.
[4]周美锋.基于Mecanum轮的全方位移动机器人研究[D].南京:南京航空航天大学,2014:66-68.
[5]GFRERRER A.Geometry and kinematics of Mecanum wheel[J].Computer Aided Geometric Design,2008,25:784-791.
[6]袁涛.H桥功率驱动电路的设计研究[D].成都:电子科技大学,2006:11-12.
[7]梅真,赵熙临.基于增量式PID智能车调速系统的设计[J].河北工业大学学报,2015,30(2):72-76.
MEI Zhen,ZHAO Xilin.Based on the incremental PID speed regulation system of smart car design[J].Journal of Hebei University of Technology,2015,30(2):72-76.
[8]黄海平,王汝传.无线传感器网TBCCA树形分簇算法[J].计算机研究与发展,2009,46(12):2033-2043.
HUANG Haiping,WANG Ruchuan.Wireless sensor network TBCCA tree clustering algorithm[J].Computer Research and Development,2009,46(12):2033-2043.
[9]QIU C X,SHEN H Y,KARAN S S.CEDAR:An optimal and distributed strategy for packet recovery in wireless networks[C]//32nd IEEE International Conference on Computer Communications.Turin,Apr.14-19,2013:2859-2867.
(责任编辑:吕文红)
Mobile Platform Incremental PID Control System Design Based on Mecanum Wheels
LI Shiguang,SHEN Mengxi,WANG Wenwen,GAO Zhengzhong
(College of Electrical Engineering and Automation, Shandong University of Science and Technology,Qingdao,Shandong 266590,China)
Abstract:To ensure the good dynamic response characteristics of the mobile platform in complex environments,a Mecanum wheel-based omni-directional mobile platform with STM32F405 as the command core was designed.H bridge driving circuit based on Mecanum wheels was used in this design.With MOS transistor of high current and low impedance to increase the motor’s drive ability,LM2903 and LMV611 to achieve the function of overcurrent and overvoltage protection,and incremental PID control strategy to inhibit the motor’s starting current and to improve the dynamic performance,this platform sent the collected video information through wireless image transmission to the console which controlled the platform in real time by using remote control.Test results show that this mobile platform has the advantage of flexible movement and strong obstacle climbing capability and can meet the project design demands for realtime performance and controllability.
Key words:STM32F405;Mecanum wheel;mobile platform;incremental PID
收稿日期:2015-10-21
基金项目:中国博士后基金项目(2015T80729)
作者简介:李世光(1962—),男,山东青岛人,高级工程师,主要从事检测技术与自动化装置方面的研究. 申梦茜(1993—),女,山西长治人,硕士研究生,主要从事检测技术与自动化装置方面的研究. E-mail:604769042@qq.com
中图分类号:TP249
文献标志码:A
文章编号:1672-3767(2016)01-0086-05