履带变构式轮履复合爬楼轮椅设计
2016-06-22曹冲振王凤芹陈京邦李韶韵
曹冲振,周 娜,王凤芹,陈京邦,姜 鹏,李韶韵
(1.山东科技大学 交通学院,山东 青岛 266590;2.山东科技大学 机械电子工程学院,山东 青岛 266590)
履带变构式轮履复合爬楼轮椅设计
曹冲振1,周娜2,王凤芹2,陈京邦2,姜鹏1,李韶韵1
(1.山东科技大学 交通学院,山东 青岛 266590;2.山东科技大学 机械电子工程学院,山东 青岛 266590)
摘要:针对爬楼轮椅楼道通过性和平地行走时无需拆分爬楼机构的要求,对爬楼轮椅转向技术和履带驱动技术进行研究,提出一种基于大轮摆动的履带变构式轮履复合爬楼轮椅方案。对爬楼轮椅的大轮摆动机构、履带爬楼机构和履带折叠机构分别进行结构设计,根据功能要求分别对其上楼过程、下楼过程进行分析,论证了方案的可行性,最后通过样机试验,验证了履带变构式轮履复合爬楼轮椅能够在乘坐者自主操作下平稳有效地实现各项功能。
关键词:轮履复合;履带变构;自主操作;爬楼轮椅;样机试验
现阶段我国人口老龄化的加速[1],使得轮椅使用者越来越多,而随着我国城镇化进程的加快,更多平房被楼房代替,相当一部分居民居住在七层以下无电梯的楼房,严重限制了轮椅使用者的活动范围[1-2]。爬楼轮椅的研究已经有很长一段时间,目前,爬楼轮椅主要有支撑腿式、轮组式和履带式[3-4]。支撑腿式的爬楼轮椅结构简单,但爬楼过程中重心起伏大,不平稳;轮组式爬楼轮椅运动比较灵活,但上下楼梯的平稳性不高且爬楼装置体积比较大;履带式爬楼轮椅的爬楼过程比较平稳、高效,但在楼梯半层平台处的通过性差,且由于行走轮小,平地行走不灵活。
轮履复合式爬楼方法结合了履带爬楼的平稳性和轮子平地行走的灵活性,是爬楼轮椅的发展方向[5-6]。目前,国内外轮履复合爬楼轮椅主要有两种实现方式:①履带爬楼机和普通轮椅组合爬楼,平地时需要拆分爬楼机构,下楼后爬楼机构需要单独存放,在楼梯半层平台处转弯不灵活,通过性差,且不能够自主操作;②一体式轮履复合爬楼轮椅,能够由乘坐者自主操作,但是结构复杂、成本高,楼道通过性较差。本研究的目的是设计一种可自主操作、平地无需拆分、楼道通过性好的轮履复合式爬楼轮椅。
1方案设计
普通轮椅平地时可由乘坐者自主操作移动,行走轮大,转弯灵活,在楼梯半层平台处的通过性好,如将履带爬楼机安装于普通轮椅下方,不超过普通轮椅的尺寸,就能解决爬楼轮椅的楼道通过性问题。但是,如果履带不能折叠,则履带机构会超过普通轮椅的尺寸,如果采用履带变构技术,便可以解决这个难题,满足爬楼轮椅各项功能的要求。
履带变构式轮履复合爬楼轮椅将普通轮椅和履带爬楼机相结合(图1(a)),包括轮椅架、大轮摆动机构、履带爬楼机构和履带折叠机构四部分(图1(b)~(e))。履带爬楼机构分成前段履带部分和后段履带部分,所述履带变构是指前后履带部分可以根据爬楼或平地行走的需要进行折叠和展开,是通过履带折叠机构实现的。轮椅架就是普通轮椅去掉了大轮。轮椅架固定在后段履带部分上,即座椅与履带底平面的夹角是固定的,故轮椅架的安装角度决定了爬楼状态座椅的倾角。大轮摆动机构通过摆动大轮实现平地行走和履带爬楼的转换,以及平地时座椅角度的调节。
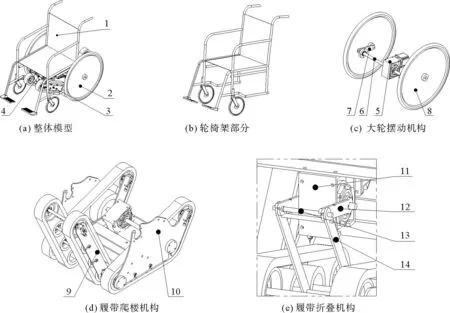
1-轮椅架;2-大轮摆动机构;3-履带爬楼机构;4-履带折叠机构;5-摆臂电机及减速装置;6-摆臂轴;7-大轮摆臂;8-行走大轮;9-前段履带部分;10-后段履带部分;11-折叠电机及减速装置;12-摆杆;13-折叠转轴;14-连杆
平地行走时,履带行走机构通过变构折叠置于轮椅座椅下方,和普通轮椅一样由乘坐者自主转动行走大轮,发挥轮椅行走轮大、越障性能好的优点;爬楼时,乘坐者自主控制履带爬楼机构展开,大轮上摆,实现平稳、安全地爬楼。
1.1大轮摆动机构
如图1(c)所示,大轮摆臂机构由摆臂电机及减速装置、摆臂轴、大轮摆臂和行走大轮组成。大轮摆臂机构的电机及减速装置通过固定架与电池盒连接,固定在后段履带部分上,带动摆臂轴转动,从而使大轮摆臂摆动大轮。摆臂轴是通过轴承固定在后段履带部分的外侧履带板上的。大轮摆动机构是实现轮履转换的关键,且在爬楼过程中起到缓冲支撑的重要作用,这一作用将在后文的爬楼过程分析中进一步阐述。为了满足爬楼轮椅的功能要求,大轮摆动机构的三个状态,分别记为大轮位置1、大轮位置2和大轮位置3。
1.2履带爬楼机构
处于爬楼状态时,履带爬楼机构作为行走部件,由电机驱动。履带爬楼机构如图2所示:驱动电机及减速装置固定在电池盒上,经驱动轴传动带动驱动轮转动,驱动轮经后段履带传动带动外侧传动轮转动,从而带动内侧传动轮转动,内侧传动轮带动前段履带转动。由于履带需要啮合传动,两个驱动轮和四个传动轮是有齿的履带轮,两个从动轮、若干支撑轮和两个导向张紧轮为无齿的带轮。为了前后履带的拆装和松紧调节,前段履带从动轮处和后段履带导向张紧轮处分别设有履带张紧机构。
1.3履带折叠机构
如图1(e)所示,履带折叠机构由折叠电机及减速装置、摆杆、折叠转轴、连杆组成。折叠电机及减速装置通过折叠电机轴摆动摆杆,从而通过连杆牵引前段履带部分进行折叠,经过三维建模及折叠功能的要求初步确定了摆杆和连杆的长度,以及履带折叠电机及减速器的安装位置。
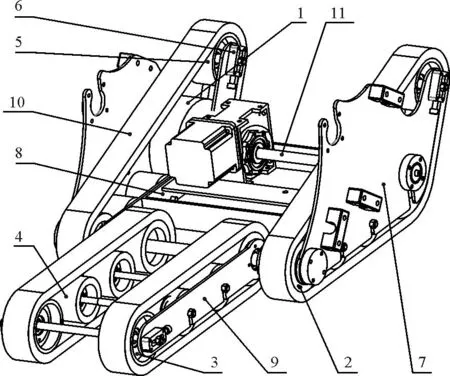
1-驱动轮;2-传动轮;3-从动轮;4-支撑轮;5-导向张紧轮;6-张紧部件;7-外侧履带轮固定板;8-内侧履带轮固定板;9-前履带轮固定板;10-橡胶履带;11-驱动轮轴
2爬楼过程分析
爬楼轮椅的运动全过程都由乘坐者自己操作控制,下面分别介绍上楼过程和下楼过程的具体操作,根据爬楼过程中的具体功能要求和动作过程来分析方案的可行性[7]。
2.1上楼过程
上楼过程可以分成如下五个阶段。
上楼准备阶段:如图3(a)所示,乘坐者双手转动行走大轮,使大轮始终靠在第一个台阶沿上,以确保履带爬楼方向与台阶沿垂直,同时向后摆动大轮使履带爬楼机构着地,继续摆动大轮到合适位置;然后,通过履带折叠机构展开履带爬楼机构,使用履带爬楼机构进行爬楼。此状态摆臂大轮的位置记为大轮位置1。
上楼阶段:如图3(b)所示,爬楼轮椅待履带爬楼机构爬过前几个台阶后,进入稳定爬楼阶段,整体重心总是沿着平行于楼梯台阶边沿连线的方向做直线运动,其重心波动较小,爬楼较平稳。
上楼结束前阶段:如图3(c)所示,在爬楼轮椅以及乘坐者整体的重心越过最后一个台阶沿之前,向后摆动行走大轮着地,避免重心越过最后一个台阶沿后突然下落。此时大轮摆臂机构就起到缓冲支撑的作用。此状态摆臂大轮的位置记为大轮位置2。
上楼结束阶段:如图3(d)所示,保持上一个阶段最后的状态不变,履带爬楼机构继续爬楼,直到履带爬楼机构完全脱离楼梯台阶,并有一定的安全距离后停止。此过程中乘坐者逐渐后仰,因有行走大轮的支撑,乘坐者后仰的角度不大,乘坐舒适且半层平台处所需操作空间较小,通过性好。
平地行走阶段:如图3(e)所示,通过履带折叠机构将履带爬楼机构折叠到轮椅座椅下面,再摆动大轮到合适位置,使乘坐舒适,至此爬楼轮椅转换为平地行走状态,上楼过程完毕。乘坐者可以自主转动行走大轮平地行走、转弯。此状态摆臂大轮的位置记为大轮位置3。
2.2下楼过程
下楼过程与上楼过程类似,也可以分为五个阶段。
下楼准备阶段:如图3(d)所示,调整好轮椅下楼方向后,先向后摆动大轮到大轮位置2,再通过履带折叠机构将履带爬楼机构展开。
下楼前阶段:如图3(c)所示,在楼梯优角处,驱动履带爬楼机构下楼,当爬楼轮椅和乘坐者的整体重心越过第一个台阶沿以后停止履带爬楼机构的运动。此处摆臂大轮也起到了缓冲支撑的作用,爬楼轮椅在摆臂大轮的支撑下,完成了重心的过渡。
下楼阶段:如图3(b)所示,先摆动大轮到大轮位置1,再驱动履带爬楼机构下楼。整体重心总是沿着平行于楼梯台阶边沿连线的方向做直线运动,其重心波动较小,爬楼较平稳。
下楼结束阶段:如图3(a)所示,下楼经过最后两个台阶时,履带最前端触地,座椅逐渐后仰,直到履带爬楼机构完全脱离台阶。
平地行走阶段:如图3(e)所示,先通过履带折叠机构将履带爬楼机构进行折叠,再将摆臂大轮摆动到大轮位置3。至此爬楼轮椅转换为平地行走状态,下楼过程完毕。乘坐者可以自主转动行走大轮平地行走、转弯。

图3 爬楼过程
3样机试验
样机试验楼梯的参数如图4,过程中各个阶段状态图如图5所示。为了验证爬楼轮椅在楼道内的通过性、履带爬楼的平稳性等性能,在若干居民楼(包括新楼和旧楼)内对样机进行了试验,试验数据如表3所示。

图4 楼梯参数参照图
试验结果表明,在常见尺寸参数的楼梯上,在乘坐者自主操作下,履带变构式爬楼轮椅楼道通过性好,且爬楼过程平稳安全。
1)爬楼轮椅爬楼过程中的平稳性受楼梯倾角的影响:当楼梯倾角较小(≤33.2°)时,爬楼轮椅的爬楼平稳性良好;当楼梯倾角较大(33.9°)时,爬楼轮椅在爬楼过程中平稳性一般,有前倾波动;当楼梯倾角过大(≥34.8°)时,爬楼轮椅不能自主操作爬楼,有前倾危险,实际中倾角大于34.8°的楼梯非常少见。
2)爬楼轮椅在楼梯半层平台处的通过性与半层平台的尺寸有关,钝角处距离是影响爬楼轮椅半层平台处通过性的主要因素:当楼梯半层平台钝角处距离较小(L1=1 050 mm)时,由于空间较小,半层平台处的通过性一般,勉强能够在乘坐者自主操作下完成转弯爬楼;当L1≤1 040 mm时,爬楼轮椅不能完成轮履转换及转弯。

图5 样机试验状态图
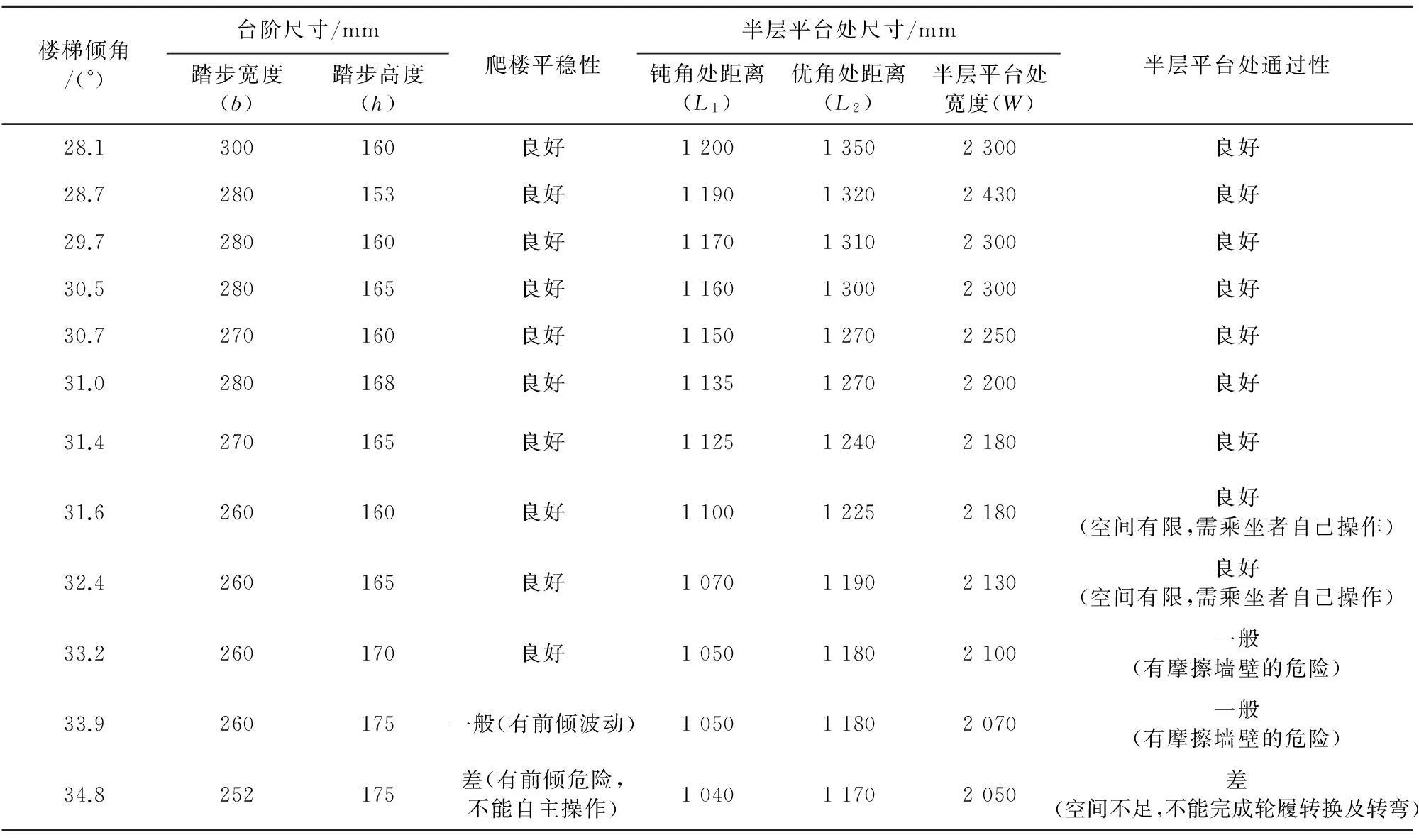
表3 样机试验数据
4结论
提出一种履带变构式轮履复合爬楼轮椅设计方案,结合普通轮椅和履带爬楼机的特点,平地无需拆分,既具有普通轮椅行走轮大、楼梯半层平台处转弯灵活的优点,又具有履带爬楼机爬楼平稳安全的优点,能够在乘坐者自主操作下平稳有效地完成爬楼、平地行走以及轮履的转换,乘坐舒适,具有较好应用前景。
参考文献:
[1]李育文,位建康,王红卫,等.一种新型的可爬楼梯轮椅结构设计及运动分析[J].制造业自动化,2014(7):135-137.
LI Yuwen,WEI Jiankang,WANG Hongwei,et al.Design and kinematic analysis of a novel stair-climbing mechanism[J].Manufacturing Automation,2014(7):135-137.
[2]王丽娟.行星滚轮转换步行式驱动爬楼梯轮椅设计[D].苏州:苏州大学,2010:1-2.
[3]孟祥雨.一种星轮式爬楼梯电动轮椅设计与研究[D].长春:长春工业大学,2012:2-6.
[4]郭化超.电动爬楼梯轮椅优化设计与稳定性研究[D].长春:长春工业大学,2014:3-9.
[5]李智卿,马书根,李斌,等.具有自适应能力轮-履复合变形移动机器人的开发[J].机械工程学报,2011(5):1-10.
LI Zhiqing,MA Shugen,LI Bin,et al.Development of a transformable wheel-track robot with self-adaptive ability[J].Journal of Mechanical Engineering,2011(5):1-10.
[6]司跃元,赵新华,侍才洪,等.轮履复合机器人行走机构的设计及运动学分析[J].机械设计与制造,2013(7):191-193.
SI Yueyuan,ZHAO Xinhua,SHI Caihong,et al.Walking mechanism design and kinematic analysis of wheel-tracked compo-site robot[J].Machinery Design &Manufacture,2013(7):191-193.
[7]曹冲振,郭云东,周娜,等.轮履复合式安保机器人移动系统研究[J].机械设计与制造,2015(5):144-146.
CAO Chongzhen,GUO Yundong,ZHOU Na,et al.Mobile system research of security robot with wheel-track[J].Machinery Design &Manufacture,2015(5):144-146.
(责任编辑:吕文红)
Design of Wheel-tracked Stair Wheelchair with Variable-structured Track
CAO Chongzhen1,ZHOU Na2,WANG Fengqin2,CHEN Jingbang2,JIANG Peng1,LI Shaoyun1
(1.College of Transportation,Shandong University of Science and Technology,Qingdao,Shandong 266590,China;2.College of Mechanical and Electronic Engineering,Shandong University of Science and Technology,Qingdao,Shandong 266590,China)
Abstract:Based on stair-climbing mechanism requirements of stair wheelchairs for staircase accessibility and no disassembling on level ground,a study on stair wheelchair steering technology and crawler driving technology was carried out.A design scheme of a wheel-tracked stair wheelchair with variable-structured track was presented,which was based on the swing of big wheels.The feasibility of the scheme was determined based on the respective structural design for big wheel tilting mechanism,crawlerclimbing mechanism and crawler folding mechanism and the analysis of climbing and descending processes of the stair wheelchair according to its functional requirements.Prototype tests verified that the stair wheelchair could meet all functional requirements under the autonomous operation of its rider.
Key words:wheel-tracked;variable-structured track;autonomous operation;stair wheelchair;prototype test
收稿日期:2015-11-13
基金项目:国家自然科学基金项目(50975164)
作者简介:曹冲振(1975—),男,山东临沂人,副教授,博士,主要从事移动机器人技术的研究.E-mail:13685423639@163.com
中图分类号:TP242;TH789
文献标志码:A
文章编号:1672-3767(2016)01-0091-06