基于多体模型的EPS和ABS协调控制研究
2016-06-22王爱国秦炜华合肥工业大学机械与汽车工程学院安徽合肥230009安徽机电职业技术学院安徽芜湖24002
王爱国,秦炜华(.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.安徽机电职业技术学院,安徽 芜湖 24002)
基于多体模型的EPS和ABS协调控制研究
王爱国1,2,秦炜华1
(1.合肥工业大学机械与汽车工程学院,安徽合肥230009;
2.安徽机电职业技术学院,安徽芜湖241002)
摘要:针对汽车电动助力转向和防抱死制动系统在转弯制动工况中的相互干扰问题,建立7自由度整车模型和EPS多体动力学模型,设计了EPS和ABS两个子控制器以及具有上层协调控制功能的协调控制系统,采用PID控制方式,在Matlab/Simulink系统中,对EPS和ABS的单独控制和协调控制分别仿真,然后采用硬件在环实验验证,结果表明,采用协调控制后,汽车在转弯制动工况下的综合性能得到改善。
关键词:建模;汽车;协调控制;仿真;硬件在环实验
电动助力转向(EPS)和防抱死制动系统(ABS)是汽车底盘中两个重要的子系统,在汽车转弯制动工况下,两者之间将产生复杂的耦合关系,为了消除系统之间的相互干扰、传感器信息资源共享、系统在不同工况下的优先控制问题,两者之间需要进行协调控制,挖掘两个子系统功能潜力,从而实现最优性能。但是现有的两者之间的协调研究很少,且局限于半车模型,甚至将重点放在仿真上,与实际汽车状况相差较远[1-3]。
基于以上原因,建立含7个自由度的整车模型,并建立可以反映复杂动力学运动规律的多刚体EPS动力学模型,采用笛卡尔建模,研制基于PID模糊控制的协调控制器,在仿真的基础上,采用硬件在环实验验证,有效的改善了汽车在转弯制动工况下的稳定性。
1 系统模型的建立
1.1整车模型
采用7自由度非线性整车模型,7个自由度由纵向、侧向、横摆和4个车轮的回转运动组成,水平方向为x轴,汽车前进方向为正,如图1所示。

图1 汽车移动示意图Fig.1 Automobile moving sketch map
汽车的动力学方程如下:
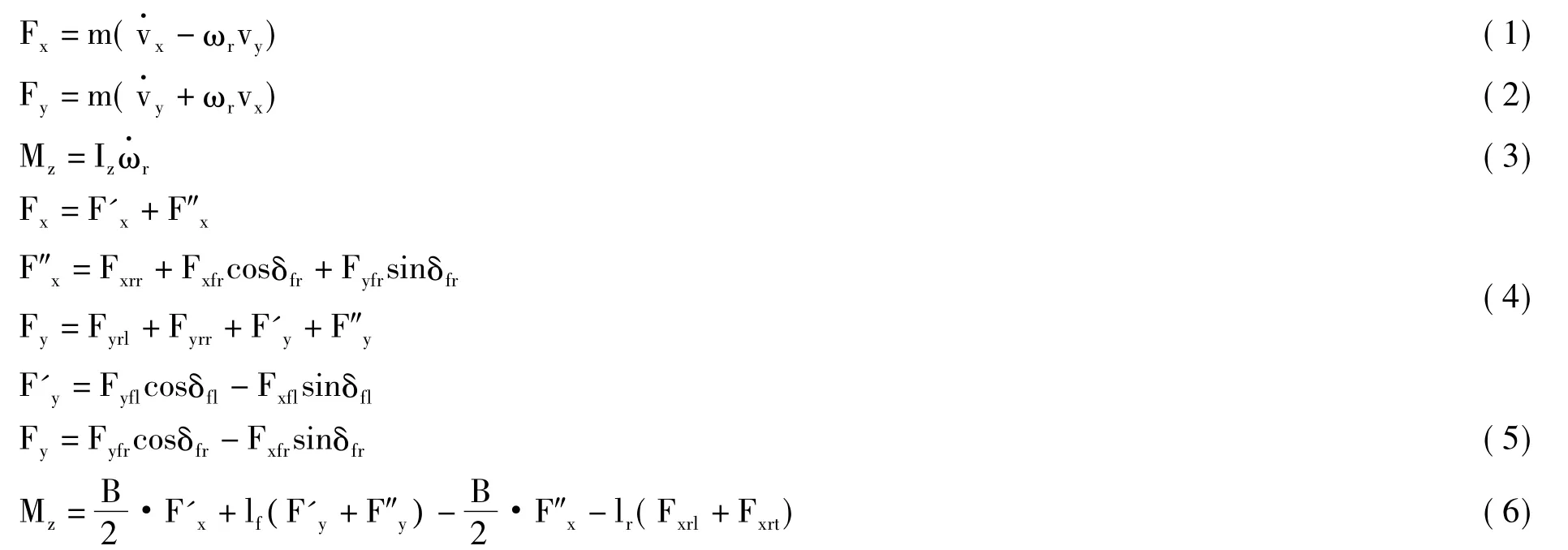
其中,m为汽车质量,vx为汽车纵向速度,vv为汽车侧向速度,ωr为汽车横摆角速度,Fx为整车纵向合力(x轴向),F'x为左侧车轮x轴向合力,F″x为右侧车轮x轴向合力,Fy为整车侧向合力,F'y为左前车轮侧向受力,F″y为右前车轮侧向受力,Mz整车所受的横摆合力矩,Fxfl、Fxfr、Fxrl、Fxrr分别为左前、右前、左后和右后车轮所受的纵向力,Fyfl、Fyfr、Fyrl、Fyrrl分别为左前、右前、左后和右后车轮所受的侧向力,B为轮距(假设前后轮距相同),lf、lr为质心到前后轴的距离,δfl、δfr分别为左前和右前车轮转角(并假设两个转角相同)。
1.2轮胎模型
采用pacejka的“魔术公式”来描述受力和滑移率之间的关系[4],
轮胎的运动方程为:

其中,Ii为车轮旋转惯量,ωi为车轮角速度,Ri为车轮半径(假设4个车轮半径一样),Tbi为制动器制动力矩,Fb为制动踏板力,ib为制动杠杆比,ηp为操纵机构效率,B为助力器助力比,Dm为制动主缸直径,p0为推出油压损耗,Awc为制动分泵面积,η为分泵效率,Bfi为制动器效能因素,Rzi为制动半径。

图2 车轮的旋转运动Fig.2 Rotational motion of a wheel
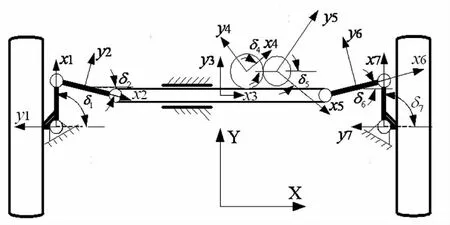
图3 EPS多刚体模型Fig.3 EPS multi rigid body model
1.3EPS模型
根据多刚体动力学理论建立的EPS模型,能反应汽车转向与内部各部件的受力状况,并可以通过方程来描述方向盘输入和转向输出两者之间的非线性关系[5-6]。
图3是EPS的多刚体模型(利于建模,将立体结构简化成平面结构)。系统由左转向轮1、左转向臂2、横拉杆3、转向柱4、电动机及减速机构5、右转向臂6和右转向轮7等构件组成,模型通过2个圆柱副、6个转向副、1个齿轮副、1个齿轮齿条副和1个滑移副联接起来。
建立系统的笛卡尔坐标矩阵:

其中,xi为第i个构件的横坐标,yi为第i个构件的纵坐标,δi为第i个构件的角度坐标。该系统有20个约束方程,约束方程表达构件与构件之间的约束关系,坐标为21个,1个自由度数,各约束方程依次对坐标求导建立雅可比矩阵φφ。

建立基于笛卡尔矩阵的多刚体动力学方程:

其中,M是包含各构件质量和转动惯量的广义质量阵,σ是拉格朗日乘子阵,ρ是广义反力矩阵,该矩阵包含方向盘输入力矩、电机助力矩、转向轮回正力矩、转向轮侧偏力等,ζ是加速度方程右项。
2 协调控制器的设计
2.1基于多目标模糊控制策略
设计了EPS和ABS两个子控制器以及具有上层协调控制功能的控制器,协调控制器采用模糊算法,能够拟合非线性函数,不需要掌握子系统的具体控制策略,并且能够实现不同工作模式之间的转化,符合研究要求[6-7]。
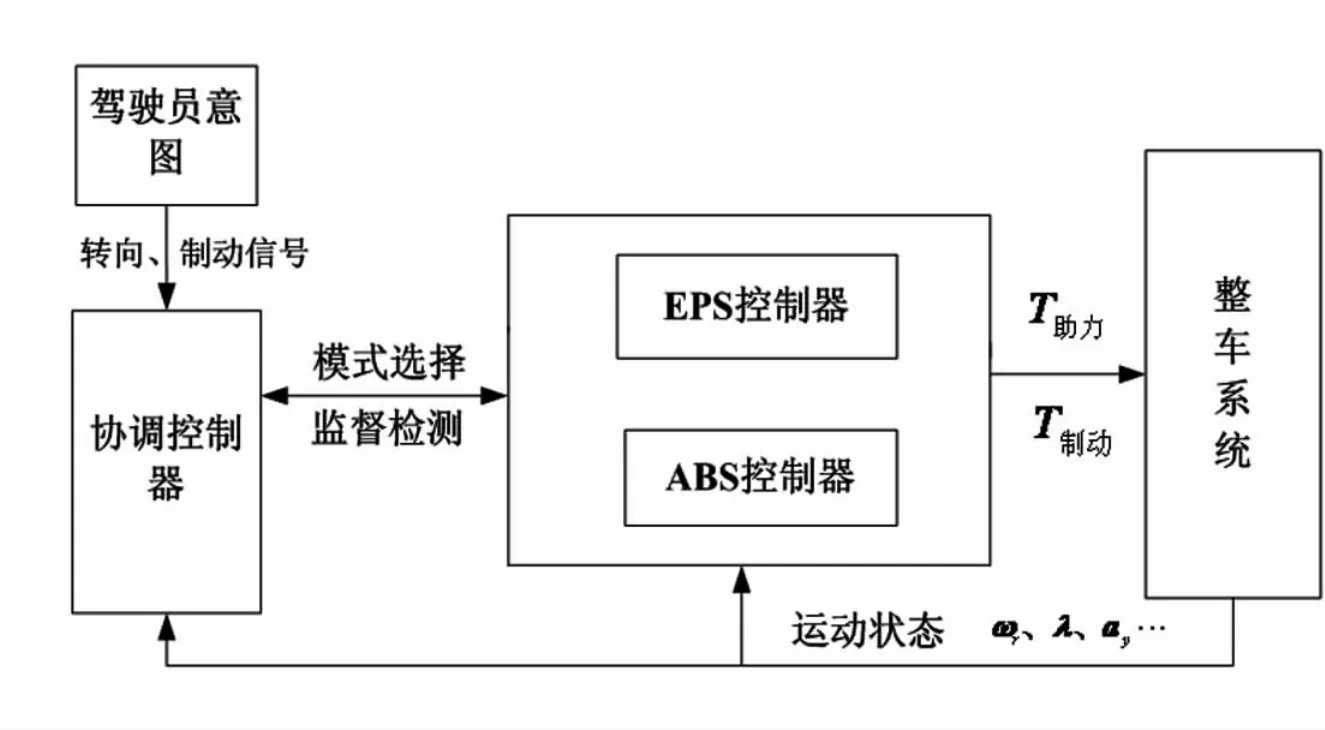
图4 功能协调控制系统Fig.4 Function coordination control system
功能协调控制器设计原则如下:
(1)在转向且无制动行驶情况下,EPS按照普通行驶工况模式执行。
(2)在直线制动工况下,ABS按照普通行驶模式执行。
(3)在转向加制动的行驶工况下,功能协调控制器工作,对于EPS和ABS皆发出控制指令。根据横摆角速度的实际值和期望值之差e(规定左转向横摆角速度为正值),并结合方向盘转角判别汽车的转向特性,进而给出电机电流的修正值(ε),防止汽车失稳。例如,当汽车左转时,如果e大于0,表示汽车有过度转向的现象,此时系统给出合适的ε值,减少过度转向的趋势,防止汽车失去稳定性。
实际横摆角速度由传感器获得,期望横摆角速度公式如下:
其中,v为车速,L为前后轮轴距,δ为前轮转角(为了简化计算,设定两个前轮转角值相同),K为汽车稳定性因素。
协调控制器同时向ABS控制器发出按照转向加制动模式进行的指令,并根据纵向加速度ax、侧向加速度ay和车速v的变化,及时调整车轮期望滑移率λ0,保持方向稳定性。
期望滑移率公式:

2.2EPS控制器的设计
EPS主要体现的是操纵轻便性,如果汽车出现过度转向时,汽车将失去稳定性,此时要减少转向助力,减少转向能力,增加路感。
采用电流增量式PID控制器,控制算法如下:

式中: k为采样序号(k =0,1,2…),Kp、KI、KD分别为PID控制器的比例参数、积分参数、微分参数,T为采样周期,△u(k)为第k次采样时刻的电枢电压增量,I(k)为目标电流,为实际电流。控制偏差为I(k) 和I'(k)的差值,控制器输出为助力电机电压,电机助力特性曲线确定目标电流,助力曲线参见文献5[5]。当转弯加制动工况时,车轮的侧向附着系数一直下降,路面的侧向力也随之降低,将导致汽车发生侧滑。此时EPS控制器需要给电流目标值I(k)一个修正值,降低助力矩,提高汽车路感和操纵稳定性。

2.3ABS控制器的设计
鉴于转向和制动的耦合关系,ABS控制器的设计也分为普通模式和转向模式。
(1)普通模式。把保证制动性能设为目标,控制策略采用基于比例函数的滑模变结构,输入量为e和e·,制动液压的变化量p为输出量。

其中,λ为实际滑移率,λ0为期望滑移率(取值为0.2),s为切换函数,c为斜率,α和β为大于0的常数,sgn(s)为理想滑模变函数,为了改善性能,防止控制器抖动,采用饱和函数sat(s)代替sgn(s)。

其中,∏为边界层。
(2)转向模式:在转向加制动工况下,为了使汽车纵向和侧向动力学综合性能达到最优,实时优化λ0。
3 仿真与分析
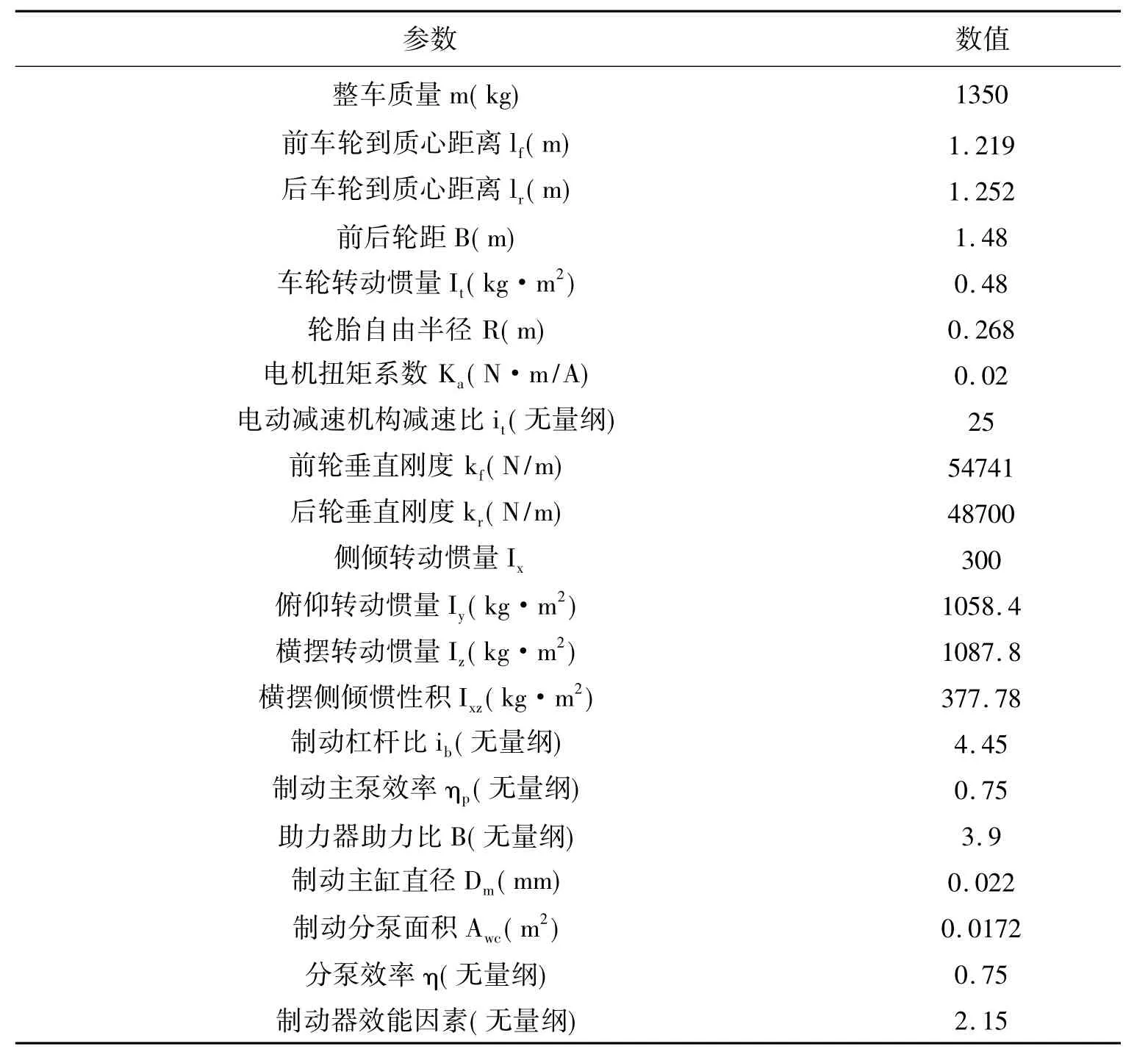
表1 整车参数表Table 1 Vehicle parameter table
在Matlab/Simulink系统中对上述系统进行仿真,整车参数见表1。采用汽车实际运行中具有代表性的给转向盘输入一个角阶跃,待稳定时采取紧急制动,直至停车,汽车的操纵稳定性用横摆角速度和侧向加速度来表示,制动性用制动距离表示。
仿真条件下,车速为40 km/h,EPS协调控制器(PID控制) : Kp=6,KD=5.5,KI=0.4; ABS控制器(滑模变控制) : c =0.45,α=0.12,β=0.06,电流修正系数ε取0.95。仿真曲线见图5~图7。
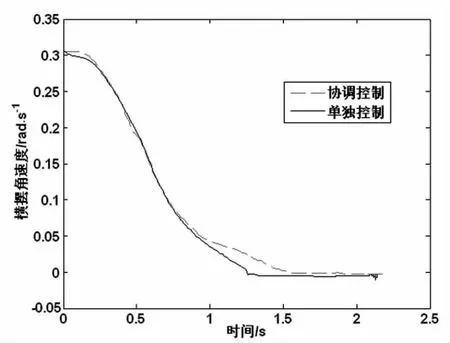
图5 横摆角速度Fig.5 Yaw rate
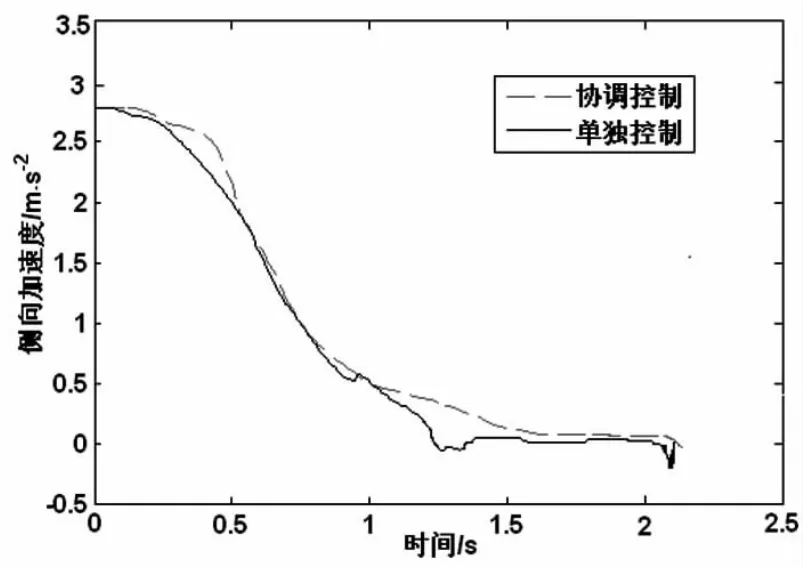
图6 侧向加速度Fig.6 Lateral acceleration
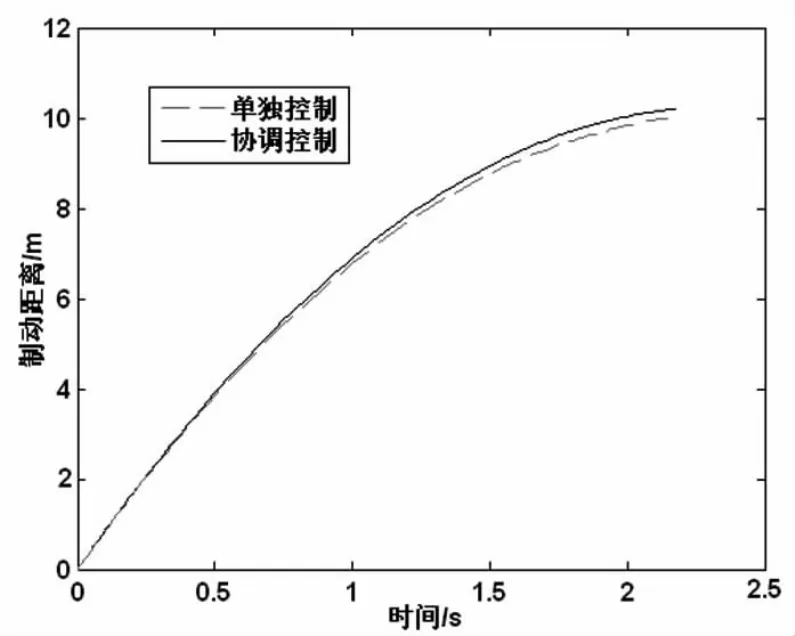
图7 制动距离Fig.7 Braking distance
对比图5和图6中的横摆角速度和侧向加速度,相对于单独控制(控制器以普通模式控制),采用协调控制方式后,描述稳定性的横摆角速度和侧向加速度在平顺性得到了改善,例如在0.8s到1.7s之间,汽车的横摆角速度和侧向加速度更加平稳,表明采用协调控制后,汽车侧滑、甩尾的趋势降低,汽车操纵稳定性得到加强。图7为制动距离比较,协调控制的制动距离比单独控制的制动距离变长,多出了0.19m,这是因为控制器优先保证了汽车的稳定性,距离虽然有所增加,但是在可以忍受的范围之内,改善了汽车的综合性能。
4 硬件在环试验
4.1实验设计
为了验证控制策略的有效性,在仿真的基础上,进行硬件在环实验。实验系统的硬件设施与条件包括协调控制器、各种传感器、LabVIEW的PXI主机、动态信号实时分析仪DSPS等。
图8是实验设计框图,实验车型为某款装有EPS和ABS控制系统的轿车,用自主研发的EPS、ABS驱动电路板代替原车电路板,应用LabVIEW分别进行EPS控制器、ABS控制器以及EPS和ABS协调控制器的设计,并运用到实验中,装有LabVIEW的上位机负责控制程序和协调程序的编写、数据输出等,装有PXI控制器的下位机提供软件运行环境,通过传感器,实时接收实车的具体信息,再通过软件中的控制算法并作出决策,然后输出指令,驱动硬件电路,控制相应的执行器工作,达到控制目的。

图8 实验设计图Fig.8 Experimental design
4.2实验结果和分析
实验在干燥、清洁、平坦的硬路面,胎压满足要求,坡度小于0.1%,无雨无雾天气,风速小于3m/s,参考ISO/TC22CS9标准设置工况,车速和仿真车速一致,半径为42m的圆周稳态运动,保持方向盘不动,实施紧急制动,分别进行单独控制和协调控制的实车实验,相关数据通过动态信号实时分析仪、综合性能检测仪、陀螺仪等实时测量。
通过陀螺仪和汽车动态信号实时分析仪测得横摆角速度和侧向加速度信号,图9的横坐标是采集时间,纵坐标是横摆角速度电压信号,分为单独控制和协调控制;图10横坐标是采集时间,纵坐标是侧向加速度电压信号,分为单独控制和协调控制。分析图9和图10,采用协调控制的横摆角速度电压信号和侧向加速度电压信号变化的曲率较小,且控制过程中比较平缓;采用单独控制的横摆角速度电压信号和侧向加速度电压信号变化的曲率较大,并且在控制过程中的电压有明显的突变。说明采用协调控制后,汽车稳定性得到了明显改善。

图9 横摆角速度电压信号Fig.9 Yaw rate voltage signal
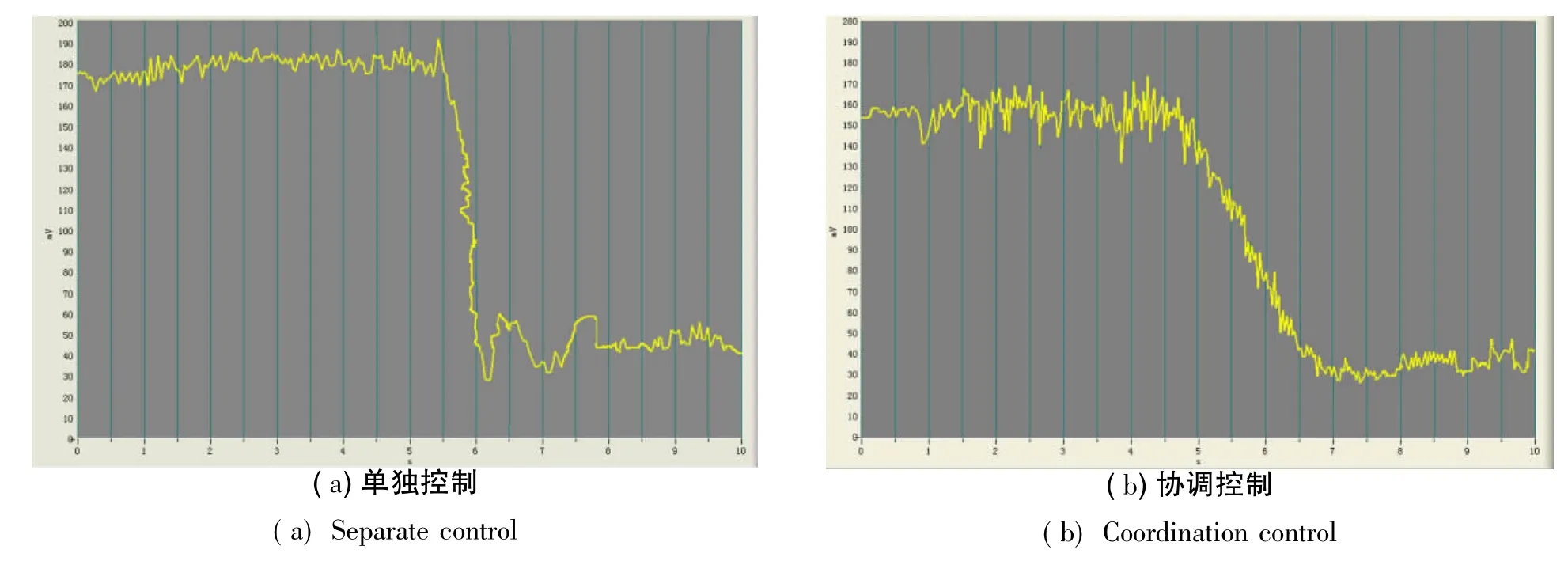
图10 侧向加速度电压信号Fig.10 Lateral acceleration voltage signal
采用光电式车速传感器对制动距离进行测量,如表2所示,协调控制的制动距离和制动时间都略有增加,但是都在容忍范围之类,并且汽车的综合性能得到了改善。

表2 实验时的制动距离Table 2 Braking distance at the time of the experiment
5 结论
分析了EPS和ABS两个系统相互作用和耦合关系之后,建立整车模型和EPS多刚体动力学模型,在多体动力学模型的基础上,对汽车EPS和ABS两个系统进行协调控制研究,分别研制了EPS控制器、ABS控制器和两者间的协调控制器,在Matlab/Simulink系统中分别对单独控制和协调控制进行仿真,并进行相对应的实车硬件在环实验,仿真和实验的结果表明:相对于单独控制器,采用协调控制器获得横摆角速度和侧向加速度两个数值变化斜率较小,且曲线没有突变,表明采用协调控制后的汽车综合性能得到改善。
参考文献:
[1]LI B,YU F.Design of a vehicle lateral stability control system via a fuzzy logic control approach[J].Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering,2010,224(D3) : 313-326.
[2]陈龙,张孝良,聂佳梅,等.基于半车模型的两级串联型ISD悬架性能分析[J].机械工程学报,2012,48(6) : 102-108
[3]NAGAI M,SHINO M,GAO F.Study on integrated control of active front steer angle and direct yaw moment[J].JSAE Review,2002,23(3) : 309-315.
[4]PACEJKA H B.Tyre and vehicle dynamica[M].Oxford: Butterworth Heinemann,2002.
[5]余志生.汽车理论(第5版).[M].北京:机械工业出版社,2009.
[6]秦炜华.基于多体模型的汽车底盘集成控制[D].合肥:合肥工业大学,2010.
[7]汪洪波,陈无畏,杨柳青,等.基于博弈论和功能分配的汽车底盘系统协调控制[J].机械工程学报,2012,48(22) :105-112.
(责任编辑:李孟良)
Research on Coordination Control of EPS and ABS Based on Multi Body Model
WANG Ai-guo1,2,QIN Wei-hua1
(1.School of Mechanical and Automotive Engineering,Hefei University of Technology,Hefei 230009,China;
2.Anhui Technical College of Mechanical and Electrical Engineering,Wuhu 241002,China)
Abstract:It aims at the problem of mutual interference in cornering braking of vehicle electric power steering and anti-lock braking system.The vehicle model of 7 degrees of freedom and the dynamic model of EPS are built.The outhor designed the EPS and ABS sub controllers and the functional coordination control system with upper level coordination control.Using PID control mode,the separate control and coordinated control of EPS and ABS are simulated,and then the hardware-in-loop experiment is used to verify.The result is that the comprehensive performance of the vehicle in the turning braking condition is improved by the coordinated control.
Key words:Model Building; Automobile; Coordinated Control; Simulation; Hardware-in-loop experiment
中图分类号:U463
文献标识码:A
文章编号:1673-8772(2016) 02-0039-08
收稿日期:2016-01-20
基金项目:安徽省自然科学基金重点项目(KJ2016A138) ; 2014年安徽省优秀人才基金项目。
作者简介:王爱国(1976-),男,安徽省肥西县人,在读博士生,副教授,主要从事控制技术研究。
