塔式起重机防摇摆控制系统研究
2016-06-22王祥傲欧美英唐卫明滁州学院电子与电气工程学院安徽滁州239000
王祥傲,欧美英,唐卫明(滁州学院 电子与电气工程学院,安徽 滁州 239000)
塔式起重机防摇摆控制系统研究
王祥傲,欧美英,唐卫明
(滁州学院电子与电气工程学院,安徽滁州239000)
摘要:针对塔式起重机负载摆动幅度大、影响吊装工作效率的问题,使用MATLAB/Simulink软件搭建塔式起重机动力学仿真模型。分析了EI输入整形器(极不灵敏输入整形器)防摇摆的设计方法,并通过塔式起重机回转运动时重物摇摆幅度的对比研究,验证了采用EI输入整形方法抑制负载摆动的有效性。
关键词:塔式起重机; EI输入整形器;防摇摆
塔式起重机或塔吊,具有机构简单、作业空间大的优点。随着我国城镇化战略的提出和实施,城市里高耸的塔吊群成为一道独特的风景。但是相比一般工业起重机,塔式起重机的吊绳更长,因此在同样的摆动角度时,其摆动的幅度也更大,大大影响了工作效率,在运行过程中发生碰撞的概率也会增加。由于塔式起重机和普通桥式起重机的区别,采用普通的消摆算法不能很好地消除摆动[1],而极不灵敏输入整形器具有对系统参数不敏感等优点,能够适应更多变化的场合。
目前国内对桥式类起重机研究较多[2-5],而针对塔式起重机的防摇摆研究不多,尤其是在回转运动时。本实验通过对塔式起重机动力学模型的分析,使用matlab软件建立塔式起重机控制系统的仿真模型,并设计3脉冲EI整形器,检验EI输入整形对于提高塔式起重机抗摇摆控制性能的作用。
1 塔式起重机运动模型分析
为了简化分析,对塔式起重机做以下简化[6]:
(1)起升使用的定滑轮简化为一个悬挂点;
(2)不计滑轮组、空气和风阻的影响;
(3)不计钢丝绳的质量。如图1所示,建立质量为m的重物在惯性坐标系(x,y,z)中的运动模型。
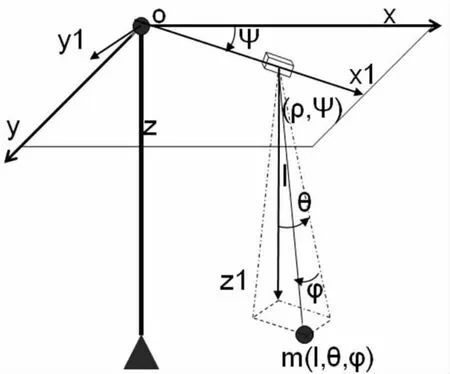
图1 塔吊模型分析坐标图Fig.1 The analysis coordinate diagram of tower crane’s model
图1所示的模型中,用于沿径向搬运重物的小车可以绕Z轴旋转,为此建立旋转坐标(x1,y1),并设x1轴与x轴夹角为Ψ,方向符合右手定则,旋臂长为ρ,则小车坐标为(ρ,Ψ) ;设绳长为l,以(ρ,Ψ)为原点建立球面坐标系,则所吊装的重物坐标为(l,θ,φ),在旋转坐标系中重物的向量为:

小车的向量为:

两个向量对时间求导求出小车和重物的速度,设小车质量为M,整个系统转动惯量为J,则系统的动能为:

设xoy平面势能为0,则重物势能为:

由Lagrange函数L = T-V,列出方程为:

其中qi为系统广义坐标(ρ,Ψ,θ,φ)中的4个变量,Qi是对应的广义力: x1方向的受力Fρ和z方向的转矩TΨ。其中θ,φ作用力为保守力,即Qθ= Qφ=0,可以得到两个变量的微分方程:
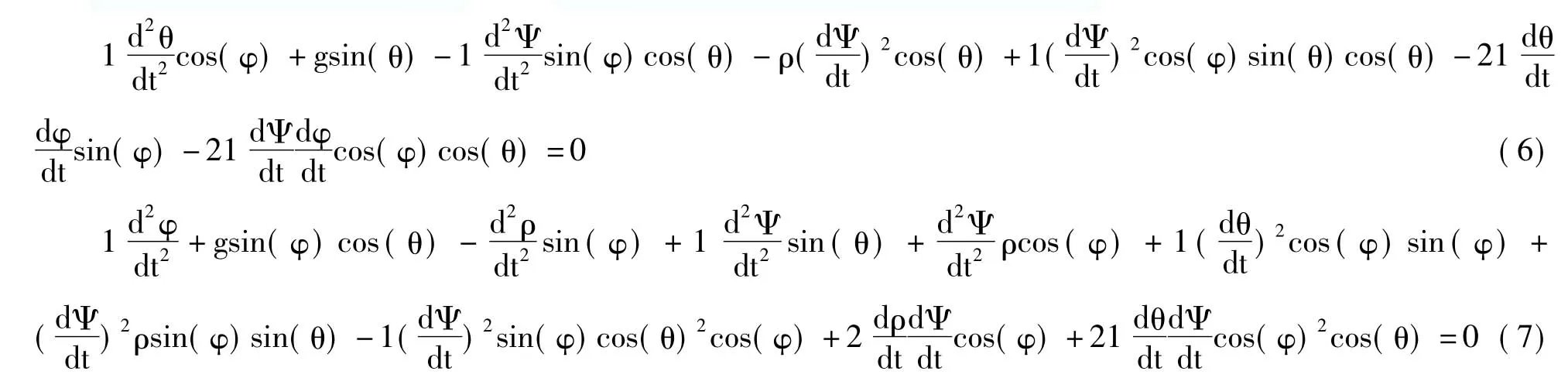
上述方程为相互耦合的非线性方程,需要进行线性化,同时忽略较小项得到摆动方程为:

式(8)、(9)即为塔式起重器重物摇摆的方程[6],在小摆动范围内满足要求。θ和φ都仅与绳长有关。
2 EI输入整形控制方法
n脉冲输入整形器的时域表达式为:

输入整形器作用结束之后(t>tn)系统的单位脉冲响应与没有整形控器控制时系统单位脉冲响应幅值之比称为残留振动,其表达式为:

其中:

令系统无阻尼固有频率的残留摆动幅值允许值为Vexp,比固有频率稍高频率ωh和稍低频率ωl处残留振动为0,就能保证在[ωh,ωl]内满足要求。设计3脉冲EI整形器如下[6]:

则有:

令ξ=0,则摆动周期为:

其中l为摆动的绳长。
3 塔式起重机控制系统的建模与仿真
通过上述塔式起重机的动力学模型分析,本实验利用MATLAB/Simulink的强大仿真功能,建立塔式起重机回转运动的控制系统仿真模型,并利用signal builder模块编辑输出信号波形。假设静态时臂长ρ =50 m,绳长l =50 m,回转最高角速度ω=0.03 rad/s,运动时的加、减速时间均为6 s。图2为所建立的塔式起重机控制系统仿真模型。
假设塔机加速回转到最大回转速度后,在5s时开始匀速回转114s,然后减速回转直至停止,总运行时间为126s。分别在有、无EI整形器条件下进行仿真,θ和φ的变化如图3和图4所示。
从图3和图4的仿真波形可以看出,θ和φ均为周期性变化,而且在回转运动中还叠加了一个低频振荡,其频率分别为固有的摆动频率和回转频率。θ和φ随着回转角度的不同,两者相互影响,θ最大值出现在塔臂转过±90°的时刻,而φ最大值出现在塔臂旋转0°或者180°的时刻。这是由于互相垂直的摆动,因回转运动相互叠加造成的。增加EI整形器后θ和φ幅值明显减小,满足残留震荡小于10%的要求,从理论上证明了此种方法的有效性。
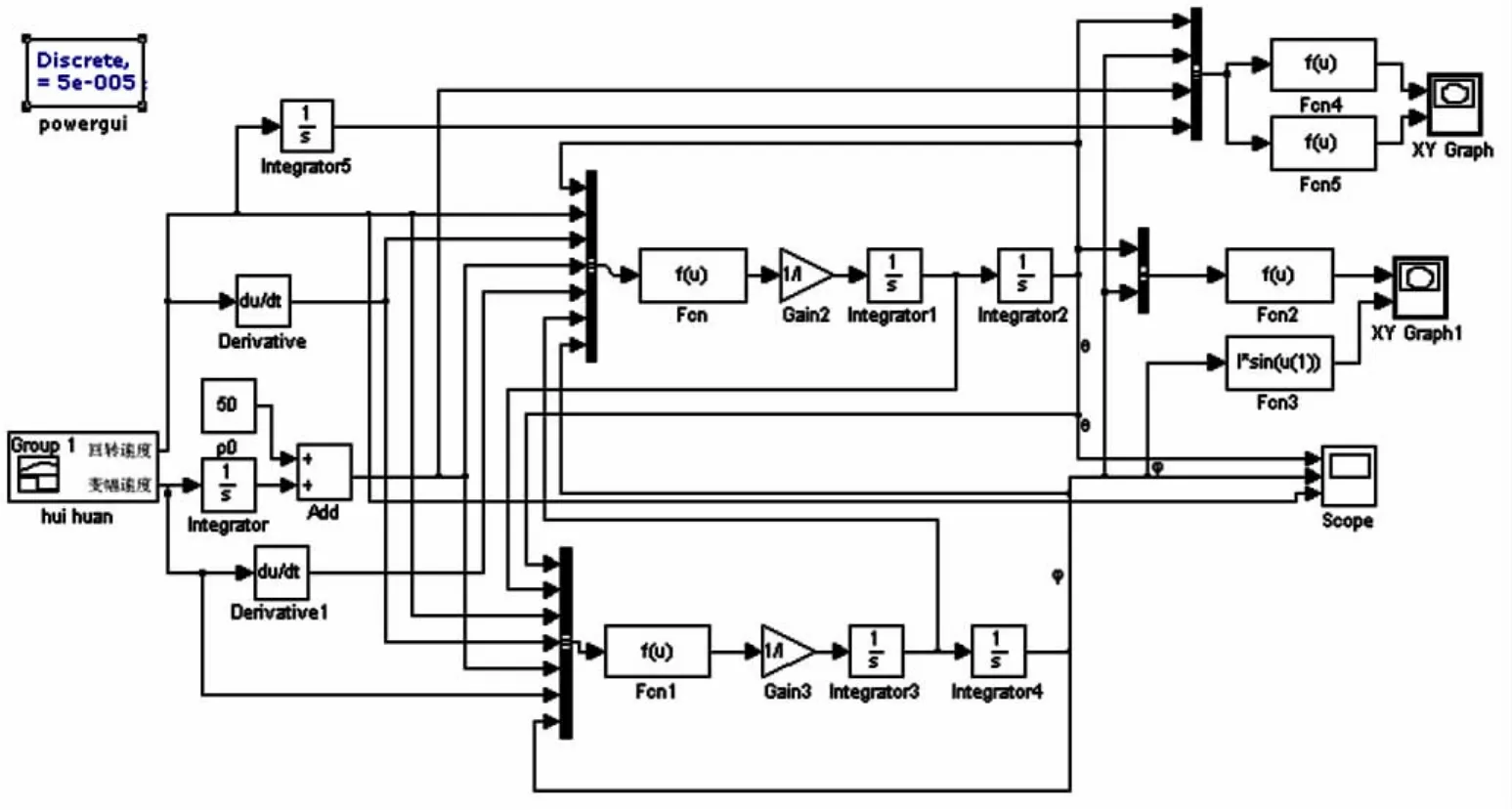
图2 塔式起重机回转运动的控制系统Fig.2 The rotary motion control system of tower crane
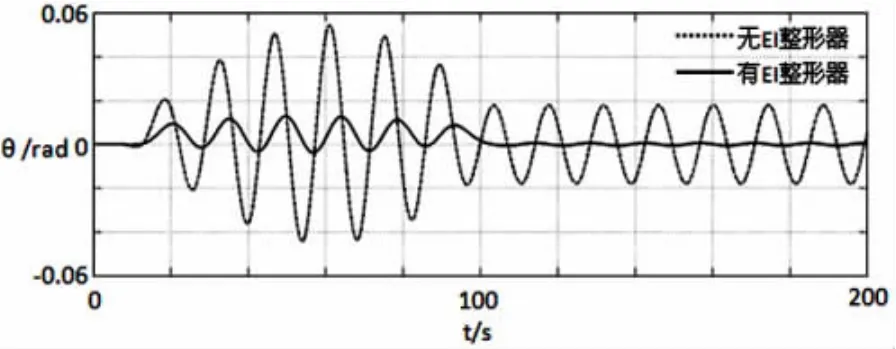
图3 有无EI整形器时θ变化的对比Fig.3 The comparison of θ angle’s changes between its with EI shaper and without EI shaper
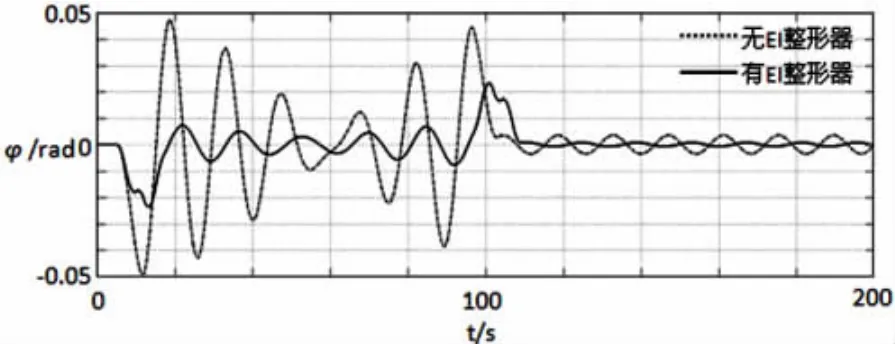
图4 有无EI整形器时φ变化的对比Fig.4 The comparison of φ angle’s changes between its with EI shaper and without EI shaper
4 结论
本实验采用拉格朗日函数分析得到了塔式起重机回转运动时的运动方程,并利用MATLAB/Simulink建立了塔式起重机回转运动的控制系统仿真模型,依据EI输入整形法编辑塔式起重机回转机构的速度给定信号,通过仿真分析,对比在有、无EI输入整形时重物的摆动情况,验证了EI输入整形器在塔式起重机回转运动中防摆动的有效性,提高了系统的控制品质,为实际工程应用提供了参考。
参考文献:
[1]楼云亭,李伟.起重机消摆控制方法的分析与评价[J].建筑机械,2011(2) : 71-75.
[2]任会礼,付玲,梅志千,等.基于输入整形的起重机消摆控制研究进展[J].机械制造与自动化,2013,42(5) : 163-167.
[3]张晓华,贾智勇.基于输入整形策略的船上回转吊车防摆控制[J].控制工程,2008,15(3) : 245-249.
[4]熊伟,梁艳阳,武丽,等.基于输入整形技术的吊车系统防摆控制[J].计算机与数字工程,2011,39(2) : 148-151.
[5]包艳,薛冬红.EI输入整形器的设计方法研究[J].长沙大学学报:自然科学版,2006,20(2) : 43-46,71.
[6]高岩,张晓亮.吊车模型控制实验系统的研制[J].实验技术与管理,2007,24(5) : 41-44.
(责任编辑:李孟良)
Research of Anti-swing Control System for Tower Crane
WANG Xiang-ao,OU Mei-ying,TANG Wei-ming
(School of Electronic and Electrical Engineering,Chuzhou University,Chuzhou 239000,China)
Abstract:Tower crane’s dynamic simulation model was built using MATLAB/Simulink according to the problems of large load swing and limited efficiency of the lifting operation.Then,it analyzes the design method of EI input shaper(Extra-Insensitive Input Shapers) in eliminating swing,and by makeng a comaparison of the simulation results of swing trajectory when doing heavy swing rotary motion,the effectiveness of using EI input shaping to restrain load swing is verified through the experiment.
Key words:Tower crane; EI input sharper; Anti-swing
中图分类号:TM92
文献标识码:A
文章编号:1673-8772(2016) 02-0047-04
收稿日期:2015-12-19
基金项目:安徽省自然科学基金项目(1408085QF134) ;安徽省教育厅自然科学研究一般项目(KJ2013Z248) ;滁州市科技计划项目(201314)。
作者简介:王祥傲(1983-),男,安徽省滁州市人,硕士,助教,主要从事电气自动化技术研究。