边缘场成像中多功能调节的机械结构设计
2016-06-22施建龙薛文东冯吴俊孙惠军洪永强
施建龙,薛文东,冯吴俊,陈 忠,孙惠军,洪永强*
(1.厦门大学航空航天学院,2.厦门大学物理科学与技术学院,福建厦门361005)
边缘场成像中多功能调节的机械结构设计
施建龙1,薛文东1,冯吴俊1,陈忠2,孙惠军2,洪永强1*
(1.厦门大学航空航天学院,2.厦门大学物理科学与技术学院,福建厦门361005)
摘要:在边缘场成像实验中,支撑样品运动的机械结构缺少调节环节,运动形式单一,样品外围共振线圈采用固定化形式,无法满足超强磁场周边不规则梯度场变化的要求.本文在前期研究基础上提出了一种多功能调节机械结构,该结构具有独立调节样品以及共振线圈姿态和位置的功能.在一维边缘场成像中保证样品和共振线圈的中心轴线可同时与梯度场中磁场方向平行,并且实现了成像过程中样品沿着磁场方向升降的方式;在三维边缘场魔角旋转成像过程中,可以保证样品和共振线圈均与磁场方向呈魔角角度,并且在样品旋转成像时一旦出现回波信号不好或者无回波的情况,还可以实现样品的实时性暂停和回转,以重新获取样品在该位置的信号.更重要的是该机械结构在三维成像过程中增加了样品的升降功能,可以在更高梯度场中获取样品更精细的图像.
关键词:边缘场成像;机械结构;多功能调节;样品升降
边缘场成像区别于传统磁共振成像,它利用传统超强磁场周边的超高梯度场实现了固体材料的磁共振成像[1].其不仅克服了固体材料弛豫时间短的问题,也因为减少了人工梯度场的使用,大大降低了成像成本.1988年Samoilenko等[2]利用传统超强磁场周边的梯度场中的“敏感层面”第一次得到了固体材料的磁共振谱图.
近年来,边缘场成像在生物、化学、材料等学科中应用广泛,2007年Nunes等在固体边缘场成像中获取了冰核质子的一维边缘场磁共振谱图,使得边缘场成像进一步体现出在固体材料成像中的优势.2012年,Tang等[4]将一维边缘场成像应用到化学固体锂电池充放电的过程中,得到了固体锂电池充放电的整个过程图像,并进行了化学分析.
但是,综合大量边缘场成像文献以及本课题组近几年所研究边缘场成像的应用发现:边缘场成像中支撑样品运动的机械结构形式单一并且固定,缺乏许多调节功能,无法满足天然梯度场的不规则性.因此本文在查阅大量文献以及进行一维边缘场成像实验的基础之上,设计了一种多功能调节的机械结构以解决一维和三维边缘场成像中样品运动形式单一、共振线圈固定化结构导致的成像质量问题.
1边缘场成像机械运动分析
超强磁场周边的超强梯度场并不均匀,其磁场方向必然不会都是与Z轴平行的.van Landeghem等通过样品定位的方式描绘了传统磁共振超强磁场边缘的超强梯度场的等强度线,其描绘的图像精度可以达到微米级,图1是传统磁体边缘场图,很显然,超强梯度场中磁场方向是杂乱的.
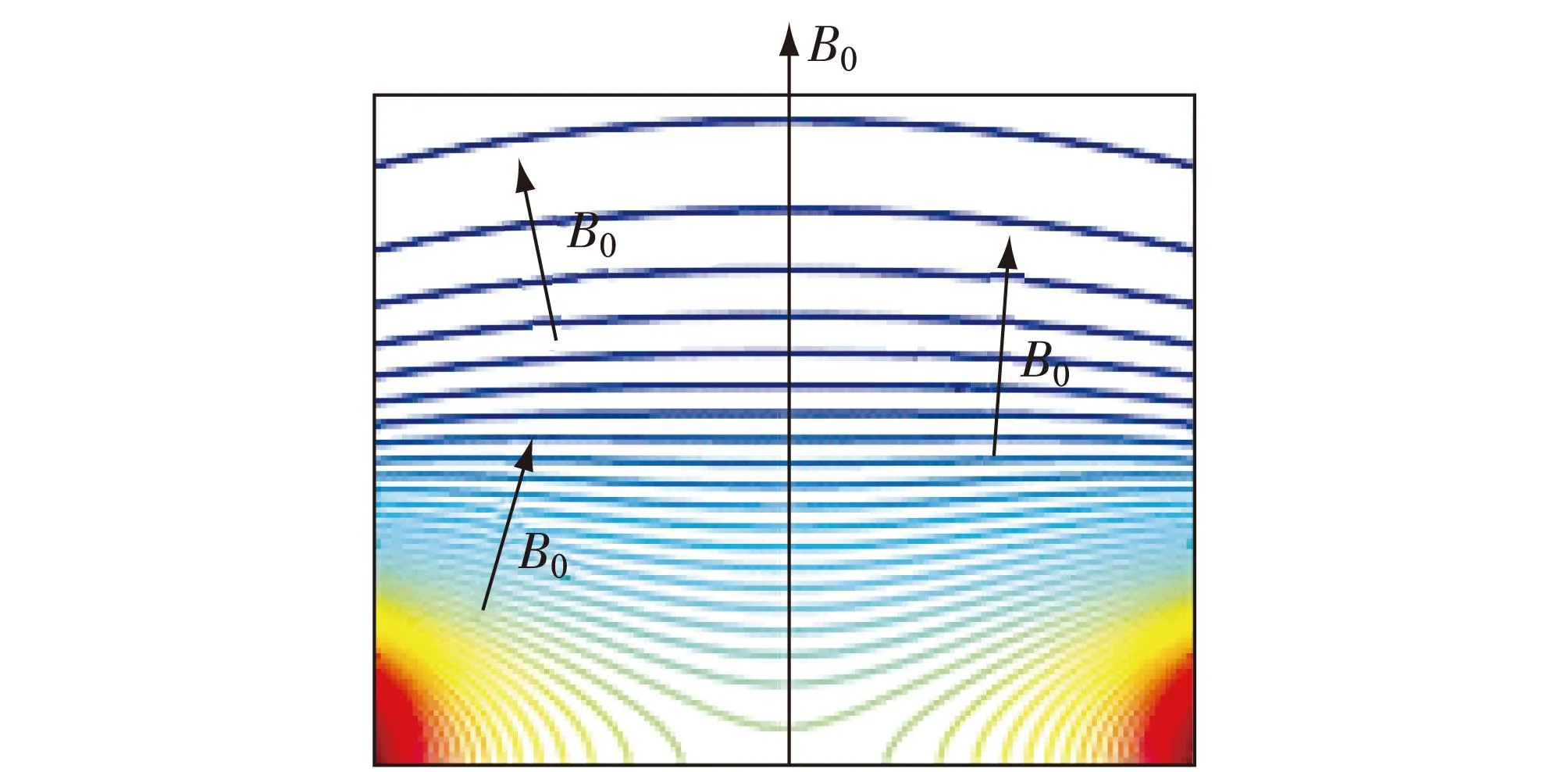
图1 超强磁场边缘的超强梯度场方向Fig.1The direction of the gradient at the fringe of the super-conducting magnet
在一维边缘场成像中,需要使样品以微米级步进[6]通过梯度场中相应固体材料的“敏感层面”,因此需要样品和共振线圈的中心轴与磁场方向平行才能保证成像过程中不会发生样品在“敏感层面”的偏移现象.然而梯度场中磁场方向的不确定性使得这两者在磁场中需要以微米级运动来进行成像前的姿态调整.目前,许多文献都提出通过样品手动水平调节(水平调节是指相对于梯度场中外磁体磁场(B0)方向)的方式来规避磁场方向不定的问题,而共振线圈依旧被固定化为与Z轴方向平行.图2所示为现存一维边缘场成像中固定共振线圈,仅有样品水平调节(图2(a))和竖直升降运动(图2(b))的方式.很显然图2(b)在成像过程中由于只有样品如图2(a)所示的手动水平调节且只能竖直升降的方式会产生样品待激发层在“敏感层面”的漂移现象.
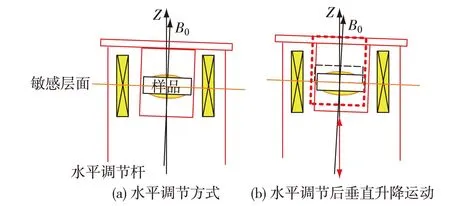
图2 现存样品水平调节和升降运动Fig.2The existed sample level tuning and lifting motion in one-dimension stray field image(ID STRAFI)
在三维边缘场成像领域,通常采用魔角旋转(magic angle spinning,MAS)使得样品到一定角度产生不同维度的梯度场[8]方式解决人工梯度场难度大且成本高的问题,当然这样便增加了样品在边缘梯度场中的运动难度和复杂度.加上超强磁场边缘的梯度场磁场方向的不确定性,机械结构的设计变得非常困难.图3所示为现今三维边缘场成像固定化MAS运动方式,样品和共振线圈在梯度场中固定与Z轴成魔角角度(54.74°),仅有成像过程中样品高速不可暂停和回转的运动方式[9](现今文献提到的自旋速率只能达到1 Hz[10-12]).并且由于梯度场激发层面大小因素,样品不能在魔角方向上进行升降,成像时或者牺牲分辨率选择在低梯度场成像[13],或者只能刻意使用微米级的样品.

图3 现存的固定化MAS方式Fig.3The existed 3D STRAFI-MAS
一维和三维的边缘场成像样品和共振线圈运动所需要的可调节机械结构一直是边缘场高分辨率成像的瓶颈.
2方案设计
上述边缘场成像机械运动分析了现存的一维和三维边缘场成像运动机械结构的缺陷.理想化的一维边缘场成像如图4所示,共振线圈和样品在边缘梯度场中同步调节以保证两者中心轴与磁场B0方向平行重合,两者之间在水平方向不存在相对运动(相对磁场B0方向水平),同时在成像过程中样品步进方向要沿着磁场B0方向以防止样品待激发层相对“敏感层面”发生偏移.
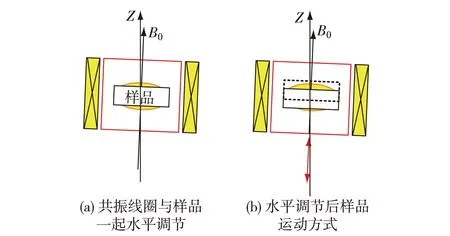
图4 一维边缘场期望的水平调节方式Fig.4The expected sample level tuning in 1D STRAFI
期望的三维边缘场成像如图5所示.样品和共振线圈不是固定与Z轴呈魔角54.74°,而是相对磁场B0方向可调,并且旋转过程中可以实时性暂停甚至回转,以保证信号质量,同时引入一维边缘场成像中样品沿磁场B0方向的升降运动,使得三维边缘场成像也可以在更高的梯度场下实现整个样品的三维成像.
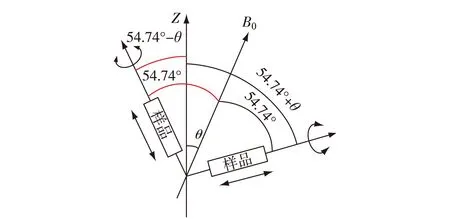
图5 本文所期望达到的三维边缘场成像样品在梯度场中的运动方式Fig.5The expected sample motion in the gradient in 3D STRAFI-MAS
3实验方法
本文实验磁体平台是BRUKE 500 MHz超强磁体,中心磁场达到11.7 T,本文提出的三维边缘场MAS的实验:1) 通过一维高精度线性升降平台定位三维成像探头至“敏感层面”(该层面通过升降平台绑定高斯计来确定,当确定升降高度后将平台携带的高斯计换成三维成像探头);2) 通过探头内部的精细机械结构来调节样品和共振线圈的姿态来调整与“敏感层面”磁场B0方向之间的夹角为54.75°;3) 共振线圈激励样品接收回波信号,当多次接收回波信号后,并且信号达到要求时,再进行旋转一定微小角度进行激励和接收,等到旋转1圈后,将样品上升一定微小角度,重复上述动作,直到完成整个样品的激发和信号回收.
(1)金融服务与城镇化进程不相匹配。社会主义的国家性质与当前的基本国情决定了需要有效整合社会资本与资源保障民生。贵阳市城镇化发展过程中,需要将教育、医疗、卫生、失业、养老等基础保障项目列为重点,构建规范性的城镇住房保障体系,容纳更多的城镇人口。但在实际过程中因政策解读与操作不到位、资金资源分配失衡等问题,不能有效解决贵阳市城镇化过程中出现的民生问题。
4机械结构的设计
图6所示为本文设计的用以实现上述实验的机械结构示意图,该结构分为3部分:升降平台、成像探头和控制系统.
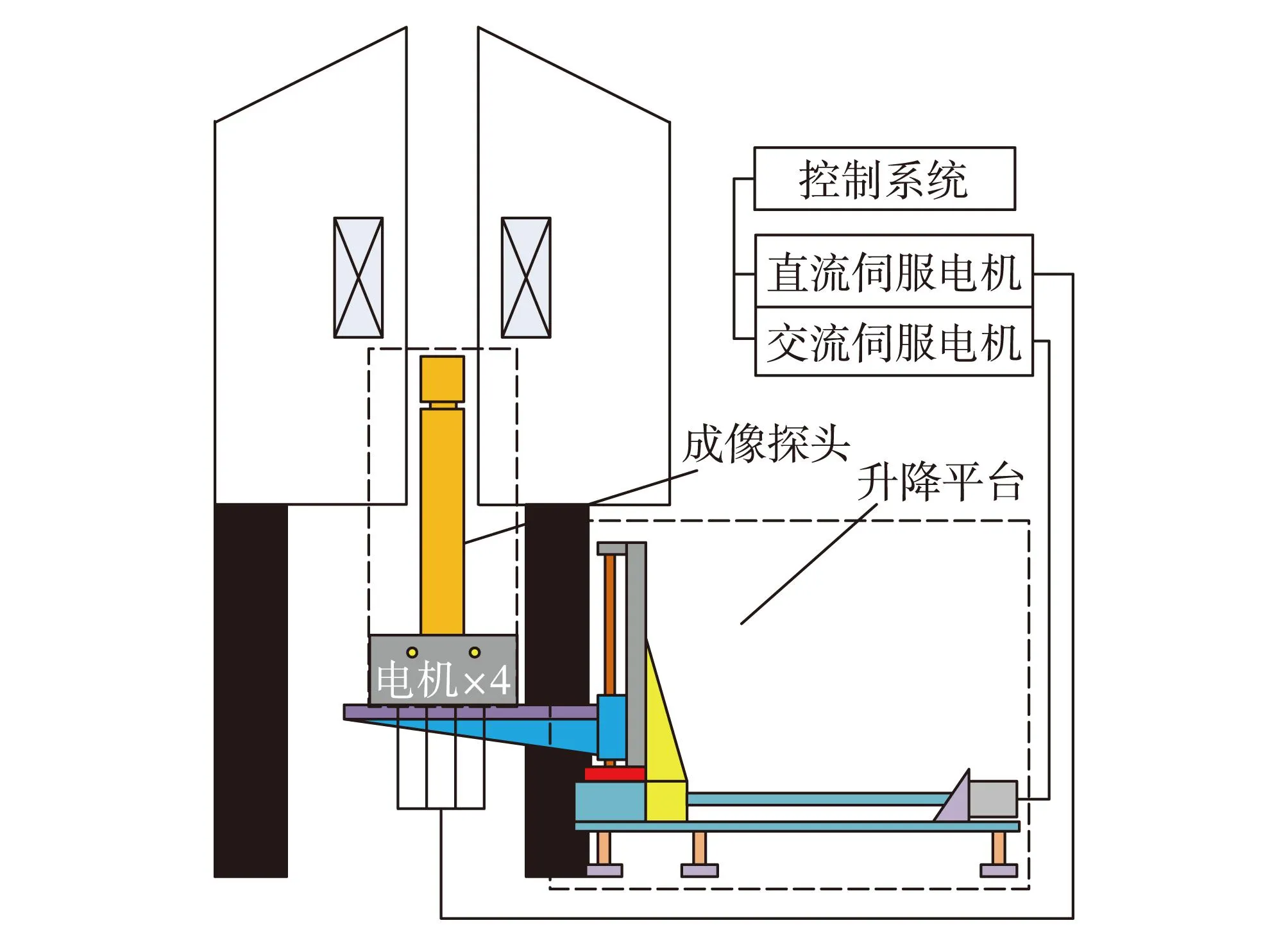
图6 整体机械结构设计示意图Fig.6The overall mechanical structure design sketch
4.1升降平台的设计与控制
由于磁体边缘的磁场场强和梯度强度均难获取,因此本文设计了高精度升降平台:电机Panasonic AC SERVO MOTOR Model No.MHMJ022G1U,驱动器Panasonic AC SERVO DRIVE Model No.MADKT1507E以及光栅尺Micro-E 1500,升降平台设计如图7所示.

图7 升降平台Fig.7The lifting platform
该平台大部分部件采用无磁铝合金材料实现,交流伺服电机通过1根铝棒延伸到磁体5高斯线外,另一端连接1个蜗轮蜗杆大减速器至丝杠和自主设计研磨的导轨块(两者采用黄铜研磨制作),将旋转运动转换为线性运动.
升降台中丝杠导轨所用黄铜材料并没有轴承钢的强度,为保证导轨的精度,黄铜的相对软性限制了行程在200 mm以内.由于超强磁场的边缘需要满足实验所需的梯度场集中在其周边350 mm以内,因此本文设计的平台通过增加二级手动升降地脚的方式来补足.
4.2成像探头的设计与控制
成像探头结构内部的机械结构的精细化、精巧化是本文机械运动的核心.本文实验用BRUKE磁体内腔为直径89 mm的通道,本文设计的整个探头结构圆柱腔体部分外径不超过73 mm,高度不超过550 mm,并且保证放入探头的样品直径能达到15 mm,如图8所示.
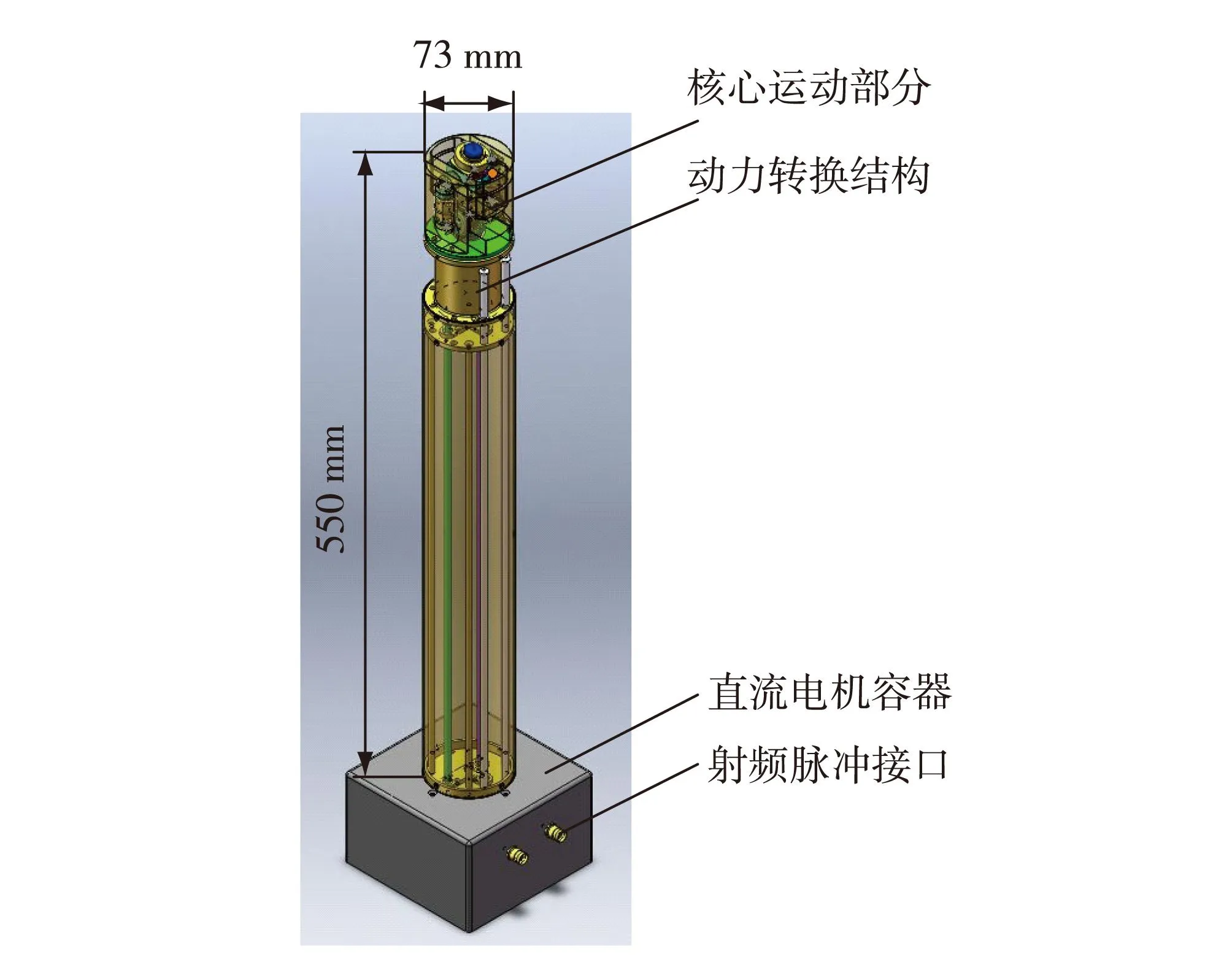
图8 探头透视图Fig.8The perspective view of the probe
直流电机容器内安装有4个直流伺服电机作为4种驱动力,并由连接杆连接探头头部的机械结构,4个电机由可编程多轴控制器(PMAC,Delta Tau Data Systems,Inc.)控制.传动结构如图9所示,4种分离的直流伺服电机驱动力被通过圈套圈的形式用斜齿圆柱齿轮整合到一起,圈与圈之间采用陶瓷轴承固定,每个圈旋转运动相互独立,最外围旋转圈轴承由固定的圆柱环支架固定,该支架也是同轴线和调谐电容支撑架.

图9 动力传递结构的剖视图Fig.9The section view of the transmission structure
图10所示为探头内部运动核心整体的视图(为了表述清晰,去掉外壳),该核心为共振线圈和样品腔的活动结构.由图10可以看出图9所示整合的电机驱动力被分离为单独、不同的运动,分别为X轴运动、Y轴运动、样品旋转运动和样品升降运动.
如图10,核心部分采用锥齿轮结构,在空间限制以及考虑负载非常小的前提下,尽可能地增大分度圆直径并减小齿轮的模数来扩大锥齿轮的齿数,以保证运动精度和运动的平稳性.底部标示为Y轴旋转为整个探头头部(图10所示探头头部整体)可以绕竖直方向双向旋转提供动力,此处定义为Y轴旋转;标示为X轴旋转为通过底部第1层锥齿轮(从下往上第1层,以下同)沿左边传递动力可以使得样品腔绕水平轴旋转,此处定义为X轴旋转,如图11所示;标示为样品线性运动为通过底部第2层锥齿轮沿右边外侧传递动力到如图12所示的蜗轮蜗杆方向转换器,将旋转运动转换为升降运动,直接连接样品并带动样品升降(蜗轮蜗杆方向转换器头部为自由旋转平台,这个旋转平台可保证样品在被带动旋转过程中不影响升降运动),此处定义为样品线性运动,如图13所示;标示为样品旋转为底部第3层锥齿轮沿右边内侧传递动力到头部使得样品腔能够绕样品腔中心轴进行旋转运动,此处定义为样品旋转,如图14所示;样品腔、共振线圈以及涡轮蜗杆方向转换器被固定在X轴旋转带动的平台上,受X轴旋转动力驱动.以上各个运动不相互干涉,可同时运动也可单独运动,最终功能都是作用到样品和共振线圈,对这两者进行姿态和位置的调整.
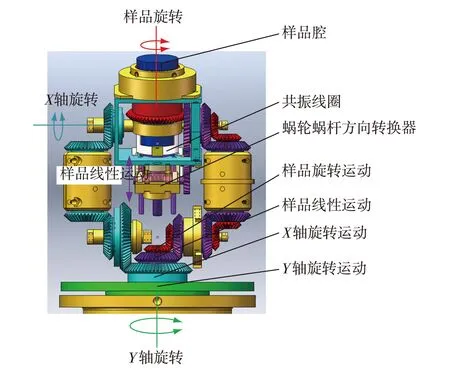
图10 头部整体三维视图Fig.10the head internal detail view of the probe
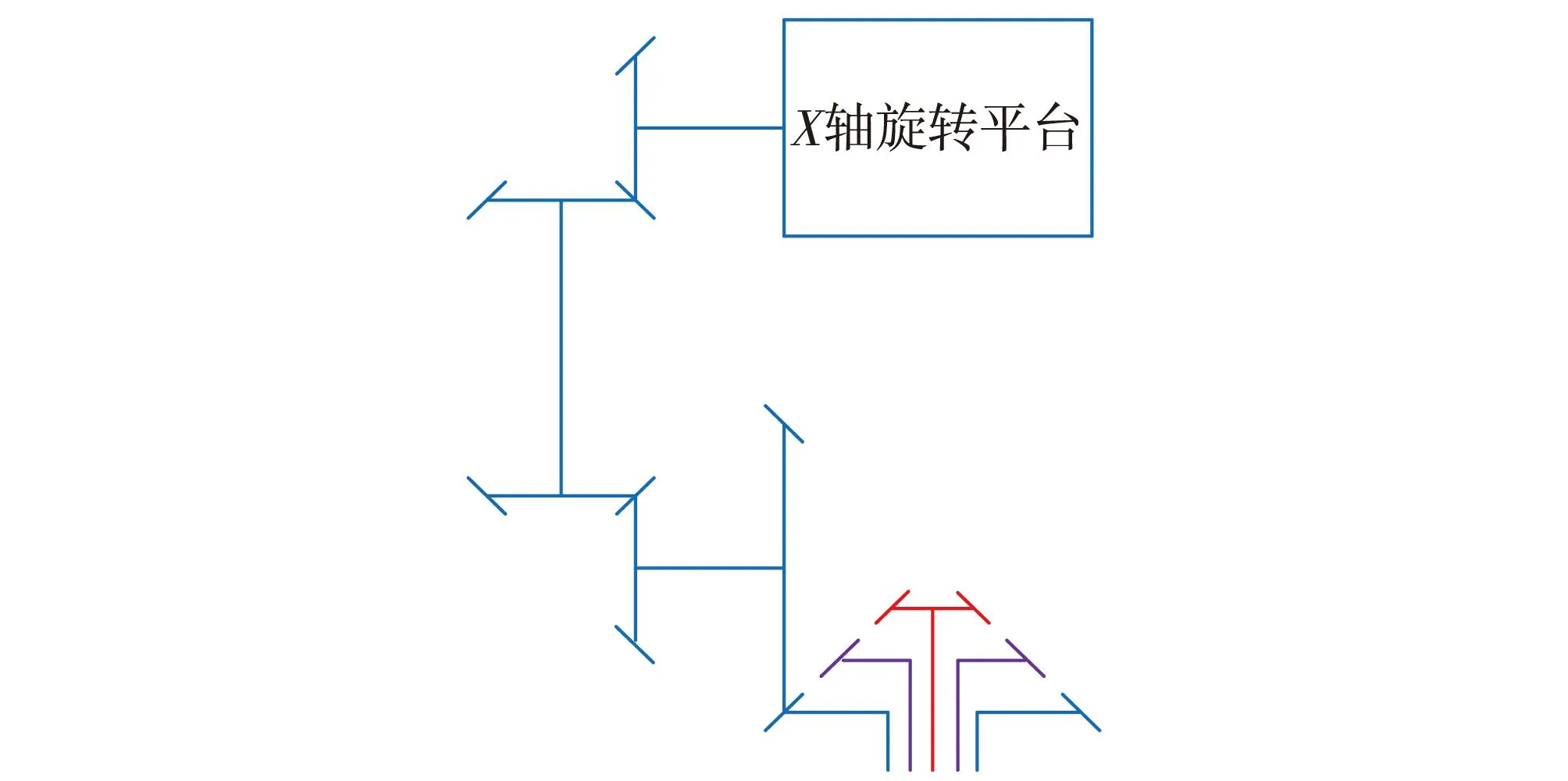
图11 X轴旋转运动简图Fig.11X-axis motion sketch

图12 微型蜗轮蜗杆方向转换器Fig.12The micro turbine worm direction convertor
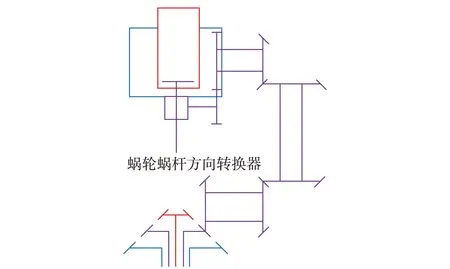
图13 样品升降运动简图Fig.13Sample lifting motion sketch

图14 样品旋转运动简图Fig.14Sample rotation motion sketch
三维边缘场MAS成像实验在该机械结构下运动顺序为:首先是梯度场的寻找,通过升降平台绑定高斯计,寻找磁体边缘场适合的梯度场,记录升降高度,替换高斯计为探头,并且升降探头中样品和共振线圈位置到高斯计寻找到的高度,此时控制Y轴旋转电机,旋转探头,间断发射射频信号以接收回波信号,判定最终位置;继而控制X轴旋转电机,旋转到与Z轴呈魔角,控制样品旋转电机使得样品缓慢旋转;同时发射射频信号,接收回波,判断信号优劣,在这过程中,微调X轴旋转电机使角度在与Z轴呈魔角附近微调寻找最佳回波信号位置,完成成像先决条件——水平调整环节.需要注意的是最佳测量位置的定位行进缓慢,但由于PMAC具有可编程性能,因此降低了操作难度,在选取好平面以及角度后,保持平台高度,锁住X-Y轴电机(探头运动终端采用微型铝制气缸摩擦锁死功能),并记录平台高度信号和X-Y轴电机旋转参数作为数据库.实验时结合共振线圈射频发射回收来控制样品旋转电机旋转,同时在采集高梯度场下样品激发区的所有数据后,控制线性升降电机对样品进行升降,使样品的其他部位进入待激发区,重复上述实验步骤,完成整个样品成像.
5结论
本文设计的机械结构很好地解决了现存一维和三维边缘场成像中还没有妥善解决的几个问题:1) 运动机械结构将传统的水平调节环节分成了X轴和Y轴2种旋转运动,不仅使水平调节变得更加方便,而且使样品和线圈同时调节保证了与B0的高度平行性,更重要的是:这种方式的水平调节可以保证三维边缘场成像中B0和共振线圈之间的魔角能够准确地达到54.74°;2) 该机械结构优化了MAS速率,使其低于0.1 Hz,通过控制高精度微米级运动的直流伺服电机来实现,同时当接收信号不好时也可以做到实时暂停旋转甚至回转在样品原位置重复发射信号;3) 该结构结合了一维边缘场成像中的样品升降运动到三维边缘场成像中,当所选择的边缘场激发层面不足以覆盖整个样品的时候,可以通过样品升降使得需要被测样品部分进入到激发层面中去,这样便可以选择更高的梯度场测量更长的样品.
致谢感谢福建省高端装备制造协同中心、半导体光电材料及其高效转换器协同创新中心对本文研究的帮助.
参考文献:
[1]WANG S L,LADIZHANSKY V.Recent advances in magic angle spinning solid state NMR of membrane proteins[J].Progress in Nuclear Magnetic Resonance Spectroscopy,2014,82:1-26.
[2]SAMOILENKO A A,ARTEMOV D Y,SIBELDINA L A.Formation of sensitive layer in experiments on NMR subsurface imaging of solids[J].JETP Letters,1988,47(7):417-419.
[3]NUNES T G,RANDALL E W,GUILLOT G.The first proton NMR imaging of ice:stray-field imaging and relaxation studies[J].Solid State Nuclear Magnetic Resonance,2007,32(2):59-65.
[4]TANG J A,ZHONG G M,DUGAR S,et al.Solid-state STRAFI NMR probe for material imaging of quadrupolar nuclei[J].Journal of Magnetic Resonance,2012,225:93-101.
[5]VAN LANDEGHEM M,BRESSON B,BLUMICH B,et al.Micrometer scale resolution of materials by stray-field magnetic resonance imaging[J].Journal of Magnetic Resonance,2011,211(1):60-66.
[6]DITTER M,STORK H,SCHUSTER B,et al.Combining one-dimensional stray-field micro-imaging with mechanical field-cycling NMR:a new spectrometer design[J].Journal of Magnetic Resonance,2011,209(1):47-52.
[7]MCDONALD P J,NEWLING B.Stray field magnetic resonance imaging[J].Reports on Progress in Physics,1998,61(11):1441-1493.
[8]ALIA A,GANAPATHY S,DE GROOT H J M.Magic angle spinning (MAS) NMR:a new tool to study the spatial and electronic structure of photosynthetic complexes[J].Photosynthesis Research,2009,102(2/3):415-425.
[9]WONG A,SAKELLARIOU D.Contrast STRAFI-MAS imaging[J].Journal of Magnetic Resonance,2010,206(2):264-268.
[10]WONG A,AGUIAR P M,SAKELLARIOU D.Slow magic-angle coil spinning:a high-sensitivity and high-resolution NMR strategy for microscopic biological specimens[J].Magnetic Resonance in Medicine,2010,63(2):269-274.
[11]HU J Z,ROMMEREIM D N,WIND R A.High-resolution H-1 NMR spectroscopy in rat liver using magic angle turning at a 1 Hz spinning rate[J].Magnetic Resonance in Medicine,2002,47(5):829-836.
[12]WONG A,SAKELLARIOU D.Sensitivity-enhanced natural-abundance silicon-29 magnetic resonance imaging[J].Chemphyschem,2011,12(18):3529-3532.
[13]WONG A,SAKELLARIOU D.Two-and three-dimensional multinuclear stray-field imaging of rotating samples with magic-angle spinning (strafi-mas):from bio to inorganic materials[J].Journal of Magnetic Resonance Imaging,2010,32(2):418-423.
Multi-functional Adjustable Mechanical StructureDesigning in Stray Field Imaging
SHI Jianlong1,XUE Wendong1,FENG Wujun1,CHEN Zhong2,SUN Huijun2,HONG Yongqiang1*
(1.School of Aerospace Engineering,Xiamen University,2.College of Physical Science and Technology,Xiamen University,Xiamen 361005,China)
Abstract:In stray field imaging (STRAFI) experiments,mechanical structures which support the sample motion lack the adjustable function.In addition,the form of the sample motion is single,and the resonance coil is immobilized.These shortcomings cannot satisfy the direction of the irregular gradient at the fringe of the superconducting magnet.This paper proposes a multi-functional adjustable mechanical structure based on the research of the STRAFI.This mechanism involves the function to adjust the posture and the position of the sample as well as the resonance coil in STRAFI.It can guarantee the sample and resonance coil to be parallel to the direction of the magnet,and enables the sample to be lifted along the magnet direction when doing one-dimension (1D) STRAFI.In three-dimension (3D) STRAFI magic angle spinning (MAS),the adjustable function can ensure the magic angle between the direction of the magnet and the center of the sample and resonance coil.The mechanism can also achieve the real-time susceptive and tuning back when the echo is poor or even is absent in STRAFI-MAS.Furthermore,this mechanism integrates the lifting function into the 3D STRAFI-MAS,which can measure finer samples in higher-gradient fields in STRAFI.
Key words:stray field image;mechanical structure;multi-functional adjustable;sample lifting
doi:10.6043/j.issn.0438-0479.2016.03.024
收稿日期:2016-01-05录用日期:2016-02-24
基金项目:国家自然科学基金(21327001)
*通信作者:hongyq@xmu.edu.cn
中图分类号:TH 122
文献标志码:A
文章编号:0438-0479(2016)03-0445-06
引文格式:施建龙,薛文东,冯吴俊,等.边缘场成像中多功能调节的机械结构设计.厦门大学学报(自然科学版),2016,55(3):445-450.
Citation:SHI J L,XUE W D,FENG W J,et al.Multi-functional Adjustable Mechanical Structure Designing in Stray Field Imaging.Journal of Xiamen University(Natural Science),2016,55(3):445-450.(in Chinese)
