基于PCI总线的陀螺仪校准系统的设计与实现*
2016-06-21郑玲玲
郑玲玲 张 锋 韩 玮
(陆军军官学院 合肥 230031)
基于PCI总线的陀螺仪校准系统的设计与实现*
郑玲玲张锋韩玮
(陆军军官学院合肥230031)
摘要在功能分析和需求分析的基础上,根据系统的设计原则和要求,提出了系统的总体设计方案,设计了基于PCI总线的陀螺仪校准平台,利用VC多线程技术实现了对陀螺仪各项参数的采集,完成了对陀螺仪的性能检测,起到对飞机姿态校准的作用。试验表明,该系统为陀螺仪校准提供了经济实用的方法和有效途径。
关键词PCI总线; 陀螺仪; 校准
Class NumberTP206+.1
1引言
陀螺仪是惯性制导系统的核心元件之一,是舰船、飞机、导弹和航天飞行器惯性控制系统的重要组成部分,用来测量基座(或运载器)的转角或角速度,其性能好坏直接影响惯性导航的精度。所以确保陀螺仪参数的量值准确可靠是提高飞行器的导航精确度以及飞行安全性的重要手段[1~2]。
针对传统的航空机载陀螺仪测试系统采用分立仪器搭建,具有成本高、自动化程度低、扩展性差的缺点,本文提出了一种基于PCI 总线技术的测试系统。通过PCI 接口芯片与计算机进行通信,完成了数据的高速采集与连续稳定数据流的输出,实现了高精度、可扩展并能实现自动化测试的校准平台,该平台可完成对垂直陀螺的性能检测,起到对飞机姿态校准的作用。
2PCI总线技术
PCI 总线作为一种独立于处理器的高性能局部总线,不依赖于CPU,因而具有较好的兼容性,同时能满足外设间及外设与主机间高速数据传输的要求。采用 PCI 总线来进行数据传输,可以解决原有的标准总线进行高速传输数据时数据传输率低带来的瓶颈问题[3~4]。
基于PCI总线的上述特点,本文采用阿尔泰公司提供的型号为PCI8302的数据采集卡对陀螺仪的信号进行采集。该采集卡可对32路单端和16路双端输入的模拟信号并行采集,输入信号幅度为±10V,AD分辨率为13b(第13位为符号位),采样速率为31Hz~180kHz(各通道实际采样速率=采样速率/采样通道数);另外提供4路模拟信号的输出功能,信号输出幅度为±10V,DA分辨率为12b,单通道最高转换速率为100kHz(±10V)[5~6]。实际应用中使用了PCI8302的21个通道(通道7~通道27)的AD,分别对应AI7~AI27。而对于垂直陀螺姿态角的信号采集使用了通道7和通道8,分别对应的硬件引脚是PIT和ROL。
3系统总体设计
通过对系统总体功能的需求分析,设计了一套由控制台、回转定位装置和主控计算机组成的校准平台。系统总体设计框图如图1所示。
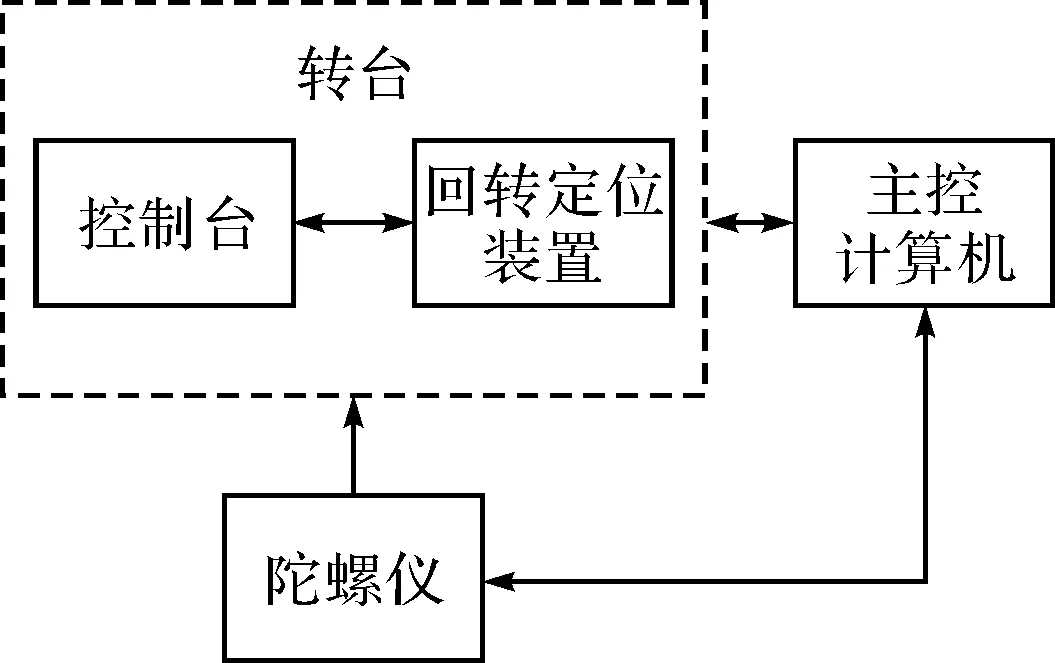
图1 系统总体设计框图
控制台采用松下AFP-XC30R型PLC作为控制器,该PLC采用通用电源(100~240VAC),输入16点(24DC),继电器输出14点(AC250V/2A),程序容量32K步,可调电位器输入2点,并配备USB通信端口。控制台与回转定位装置之间通过RS-485进行通信。主控计算机通过以太网口与转台通讯,控制台根据主控计算机发来的定位指令向电机驱动器发出控制命令,使转台转动到某一固定角度,主控计算机采集测量传感器反馈的位置信号并进行显示。电机在转动过程中根据绝对编码器发送的实时编码值与目标编码值进行比较来判断电机的正反转并实现精确定位。
系统的工作过程为:在对陀螺进行测试前,需要将陀螺固定在测试转台上,并将转台调整到水平位置。转台由X轴转台和Y轴转台两个子系统组成,分别实现X、Y两个轴的转动。各子系统由台体、驱动系统、转动系统以及执行机构组成。选用交流伺服电机作为各子系统驱动装置,经蜗杆蜗轮减速后输出旋转运动。将垂直陀螺放在无人机飞行姿态校准台上(固定于Y轴转台的转盘上),以校准台作为标准激励源。在主控系统的驱动作用下,使校准台旋转一定的角度,由主控计算机的数据采集卡直接采集陀螺仪感应的角度值,将其与标准值比较,给出校准结果。这样,通过飞行姿态校准台模拟飞机飞行中的各种姿态,比较转台的姿态与无人机系统的输出即可进行飞行姿态校准。
4系统硬件设计
为了确保平台的稳定性和可靠性性,设计了一台双轴机械转台,其工作原理为:采用直线电机作为驱动件,光栅尺和高精度倾斜角传感器作为反馈器件,直流电机通过直线长度的改变从而改变陀螺工作面的倾斜角。该校准平台实物图如图2所示。

图2 校准平台实物图
校准平台的设计采用的是一种基于PLC的回转定位装置,通过控制面板发送指令,由电机控制装置的回转,绝对编码器通过发送实时编码值实现精确定位。控制面板的键盘和显示部分直接与PLC的I/O口相连,通过对I/O口的控制实现键盘输入和显示功能。回转装置主要由回转链条、回转动力和减速箱等组成。回转链条在回转动力驱动下按指令左右转动,系统选用三相交流电机通过变频器与PLC相连,两者之间通过485通信实现对电机的控制。绝对值编码器与电机同轴安装,电机转动的同时带动编码器转动[7~8]。
5系统软件设计
系统软件主要采用Visual C++6.0进行编程,基于VC功能强大,通用性强的特点,系统采用了模块化结构的程序设计方法。
系统软件主要包括输入/输出功能模块、校准测量功能模块和数据库管理功能模块。其主要功能是实现对垂直陀螺的全自动校准,能自动完成校准数据运算、数据存储功能。为了实现对校准结果的动态监控和显示,利用VC同时创建两个线程,即工作者线程和用户界面线程。工作者线程用于计算函数程序的调用,用户界面线程用于完成计算机结果的界面显示。这样,在主执行程序运行的同时,计算过程也在后台同步进行。通过两个线程之间的通讯将工作者线程不断变化的结果发送到主执行程序,同时显示在界面上,从而实现了对校准结果进行动态监控的目的[9~10]。另外系统软件的数据查询模块和报表生成模块可以对所有保存在数据库中的信息,根据用户自定义的组合查询条件,显示查询结果并自动生成相应的校准证书。系统软件总体流程图如图3所示。

图3 系统软件总体流程图
软件校准步骤按如下方式进行:将垂直陀螺安装在转台上之后首先完成对转台的自校准,再进入主控计算机的校准模块,校准界面如图4所示。

图4 垂直陀螺校准界面
设定完测试间隔和角度值之后,转台则在程序的控制下以规定的间隔时间和角度值进行转动。系统通过模拟飞机在空中各种姿态来调整转台,进行空间角度测试,主控计算机则实时采集并分析陀螺的输出信号,中间状态实时显示,通过比对发送的转台姿态命令与陀螺仪测量值,分析出不同情况下的陀螺输出性能,实现对陀螺仪的校准测试。
实验结果表明,该陀螺仪校准系统能准确模拟飞机在空中的各种姿态,并能实时采集陀螺的输出信号,很好地完成了对陀螺仪的性能检测。
6结语
本文利用了PCI总线技术实现了对陀螺仪的校准,提出了一种低成本、高精度的陀螺仪校准平台的设计方案。系统在硬件方面以PLC为核心设计了一台双轴校准平台,该平台操作简便、实用可靠;在软件设计方面,基于VisualC++6.0的开发环境,利用多线程技术结合PCI8302数据采集卡的特点实现了对陀螺仪参数的高速采集和动态显示。该系统为陀螺仪的测试和校准提供了一定的参考价值,具有较高的实用性和广泛的应用前景。
参 考 文 献
[1] 王妃.陀螺仪校准初探[J].江西测绘,2011,3(89):40-41.
[2] 王曙霞,梁洪洁,王小营,等.基于虚拟仪器的机载陀螺仪测试系统研究[J]. 电子设计工程,2010(6):42-44.
[3] 谢丽贺.基于PCI-2501的高速数据采集与反馈系统[J] .自动控制与检测,2014(2):67-69.
[4] 龙杰,赵秋明,贾磊磊.基于PCI总线的数据采集卡在工业中的应用[J].长春工程学院学报,2011,12(1):131-134.
[5] 张平,周日峰.基于PCI总线的高速多通道数据采集与存储[J] .重庆大学学报,2006,29(3):87-91.
[6] 刘显文,雷金红,谢江蓉.PCL-818L数据采集卡在VC++6.0环境下的软件开发[J].工业控制计算机,2007(20):45-46.
[7] 王传尧.基于PLC控制的恒压供风系统的设计[J].电源技术应用,2013(2):36-37.
[8] 汤斌,王文健,王华.两种升降回转定位装置的设计[J].计测技术,2012(3):47-49.
[9] 孟昭荣,江立辉,胡兴伟,等.基于VC多线程的实时数据采集系统[J].舰船防化,2008(2):44-47.
[10] 王刚,孙娴.基于VC的多线程异步串行通信动态链接库设计[J].现代电子技术,2012(35):36-36.
Design and Realization of Gyroscope Calibrating System Based on PCI bus
ZHENG LinglingZHANG FengHAN Wei
(Army Officer Academy, Hefei230031)
AbstractBased on the functional and demand analysis, the paper introduces the whole scheme and designs the gyroscope calibrating system according to the principles and demands of system. By using multiple thread technology, the paper has realized the collection of several parameters of gyroscope and also completed the performance test of gyroscope which has a good use for the aircraft pose calibration. The test shows that the system has provided an economical solution and effective way for the calibration of gyroscope.
Key WordsPCI bus; gyroscope; calibrating
* 收稿日期:2015年11月7日,修回日期:2015年12月26日
基金项目:安徽省自然基金项目(编号:1308085ME80);装备预言基金项目(编号:914A17050312JB91202)资助。
作者简介:郑玲玲,女,硕士研究生,讲师,研究方向:计算机控制。张锋,男,硕士研究生,讲师,研究方向:电子系统设计和信息通信。韩玮,女,硕士研究生,讲师,研究方向:仪器与科学技术。
中图分类号TP206+.1
DOI:10.3969/j.issn.1672-9730.2016.05.012
