列车测速多普勒信号模型抖动误差分析*
2016-06-21李小波谌诗娃毛云祥
李小波 谌诗娃 毛云祥
(合肥电子工程学院 合肥 230037)
列车测速多普勒信号模型抖动误差分析*
李小波谌诗娃毛云祥
(合肥电子工程学院合肥230037)
摘要提出了考虑天线方向性的列车抖动情况下多普勒测速信号数学模型。首先研究分析了雷达多普勒测速原理,推导了连续波雷达地面回波信号公式;在考虑地面散射环境与天线方向性的前提下,提出了不同时刻接收机的地面单一散射块回波多普勒信号矢量模型;进一步根据各个单一散射块的统计独立特性,提出了所有散射块地面回波多普勒信号矢量模型。
关键词多普勒; 抖动误差; 均匀散射
Class NumberTN247
1引言
随着我国铁路运输事业的不断发展和高铁运行速度的不断提高[1~2],对列车运行速度的测量精度和可靠性体处理有了越来越苛刻的要求。目前,已经研究并应用于实际生活的列车测速方法有很多,例如脉冲转动测速方法[3]、GPS定位测速方法[4]、激光测速方法和多普勒雷达测速方法[5]等。雷达测速因受到列车空转,地形等因素影响较小[6],且具有相对前几种方法而言具有更高的安全性和可靠性,目前已经被广泛应用于交通道路的管制以及汽车安全技术等各个方面[7]。
雷达测速是通过向地面发射信号,利用多普勒频移效应,通过测量回波信号与发射信号的频率差来实时测量列车速度。但是由于发射波束的旁瓣增益和地形散射的影响[8~10],铁轨边缘回波和对向驶来的列车回波等各类信息也会进入接收机中。所以,研究建立科学合理的多普勒测速信号模型是多普勒谱估计和测速滤波的先决条件。本文在分析雷达测速原理的基础上,研究测速双天线雷达在非均匀散射背景下的地面回波数学模型,并通过仿真分析模型物理意义,为更精准地进行谱估计和测速滤波奠定了理论基础。
2雷达测速基本原理
2.1多普勒测速原理
现考虑列车以恒定径向速度vr向相对静止目标行驶,初始时刻,列车距离静止目标距离为R0,那么列车的相对运动导致距离R随时间t发生变化:
R(t)=R0-vrt
(1)

(2)
上式求解可得:
(3)
假设发射窄带信号,信号形式为s(t)=exp(jωct),那么回波信号的数学模型为
sr(t)=Re{Arexp[jωc(t-τ(t))]}

(4)
由式(4)可得,载波频率偏移ωd为:
(5)
进一步可得:
(6)
由式(6)可知,只要测出多普勒频率fd即可计算出列车的行驶速度。
2.2雷达测速原理
雷达测速系统采用了多普勒雷达体制,工作原理基于多普勒效应。测速天线置于列车车厢下方,以角度θ向地面发射雷达波。当列车以速度v(t)运动时,根据多普勒效应,接收到的雷达波会产生多普勒频移fd,如图1所示,多普勒频移fd与列车运行速度v(t)的关系如下:
(7)
其中,λ为雷达信号波长,θ是波束主瓣方向与列车行驶方向的夹角,v(t)是列车相对地面的行驶速度。
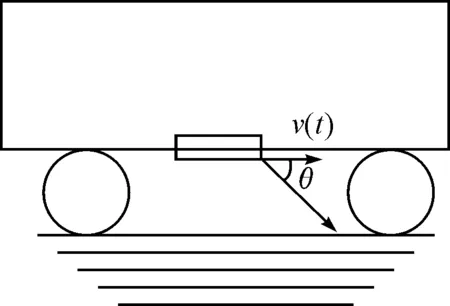
图1 雷达测速原理图
但是式(7)反映的多普勒频率仅是雷达发射波束主瓣中心的回波多普勒频率,但是测速雷达的雷达波束一般不会太窄,而且副瓣回波也会进入测速雷达接收机。地面回拨的多普勒频率与方位角度有关,从各个方位进入接收机的测速雷达信号多普勒频率不会是理想的单频点,而是在某一频段连续分布的谱线。为了能够更加准确地测量列车的行驶速度,必须从数学的角度更精确地分析出地面回拨的多普勒信号模型。
3非均匀散射环境下多普勒信号模型分析
3.1多普勒信号模型分析
t0时刻单一地面回波信号块P的几何模型如图2所示,天线距离地面高度为H,回波信号块P投影半径为R,P点方向与列车行驶方向的夹角为α,俯仰角为θ,方位角为φ。根据式(7),可以得到t0时刻进入接收机的单一回波信号块公式:

s0(t0) =Arexp[j2πλ2vrcosα·t0]
(8)

图2 地面回波几何模型图
对地面回波作如下假设:
1) 不同散射面的地面回波是统计独立的。因为进入接收机的地面回波是大量单一回波块的和,它们是渐进高斯分布的。
2) 时间上杂波起伏缓慢。
因为测速雷达是连续波,不是脉冲测速,所以在t0时刻进入雷达接收机的地面总回波是可视范围内的所有散射面的回波的积分。可以得到:

s(t0) =∫Rr=0∫2πφ=0s0(t0)dφdr
(9)
再将天线的方向性和地面散射特性考虑进去,使式(9)变为

s(t0) =∫Rr=0∫2πφ=0F(φ)L(φ,r,t0)Ar
(10)
其中,L(φ,t0)是不同散射背景下的散射系数,因为地面回波距离很近,不考虑传播衰减因子带来的影响;F(φ)是天线方向图函数,对于单天线方向性呈高斯分布的方向图函数为
(11)
其中,φ0是波束主瓣中心所指向的方位,φ0.5是半功率波束宽度。
进入接收机的地面回波信号经过数字采样之后,是以数列的形式进行处理的,假设采样周期为Ts,采样点数为N,地面回波信号和噪声均可以表示成如下矢量形式:
s=(s1,s2,…,sN)T;n=(n1,n2,…,nN)T
(12)
其中,s是信号回波矢量、n是高斯噪声矢量,si是第i个采样点, 设初始时刻t0=0,数据形式为

si =∫Rr=0∫2πφ=0F(φ)L(φ,r,nTs)

(13)
3.2列车抖动情况下信号模型误差分析
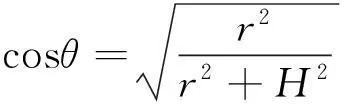
在列车行驶过程中,因为地形影响和铁轨工艺问题,避免不了列车会存在一定程度的抖动,这种轻微的抖动会造成同一时刻进入接收机的信号发生变化,信号模型存在一定的误差。这里,先分析列车上下纵向抖动情况下的信号模型。
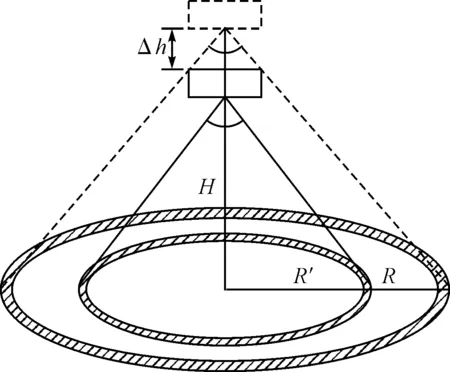
图3 测速雷达纵向抖动示意图
如图3所示,当测速雷达纵向抖动时,天线到地面的距离会存在±Δh的偏差,因而导致地面主瓣照射半径会发生改变,式(10)变为

s(t0) =∫R±ΔRr=0∫2πφ=0F(φ)L(φ,r,t0)

(14)
当测速雷达产生横向抖动时,波束照射面积不会发生变化,但是地面散射系数会由于位置的改变而发生改变,如图4所示。
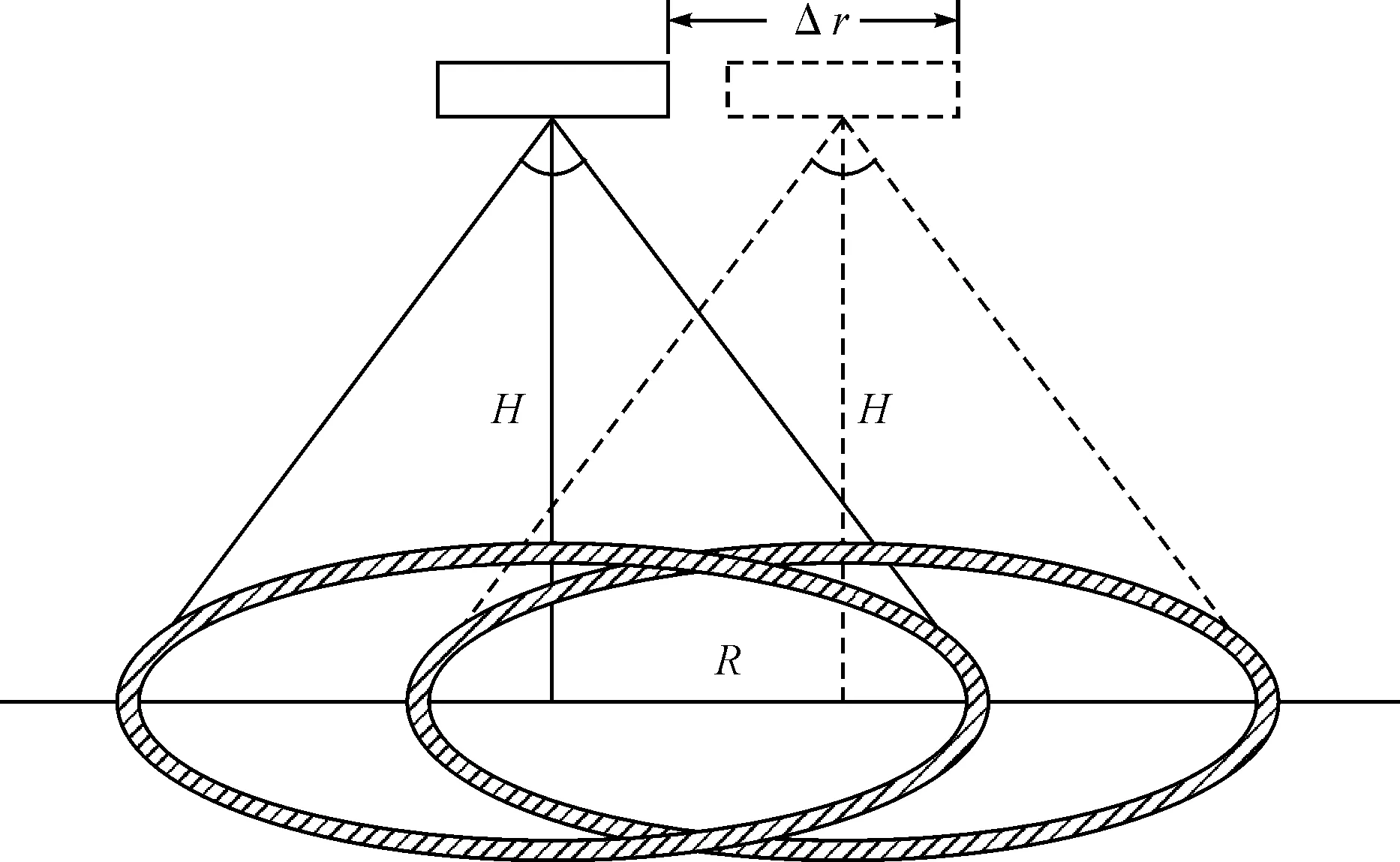
图4 测速雷达纵向抖动示意图
式(10)变为

s(t0)= ∫Rr=0∫2πφ=0F(φ)L'(φ,r,t0)
(15)
当测速雷达发生斜向抖动时,雷达主瓣波束的照射面积和地面散射系数均会发生改变。如图5所示。
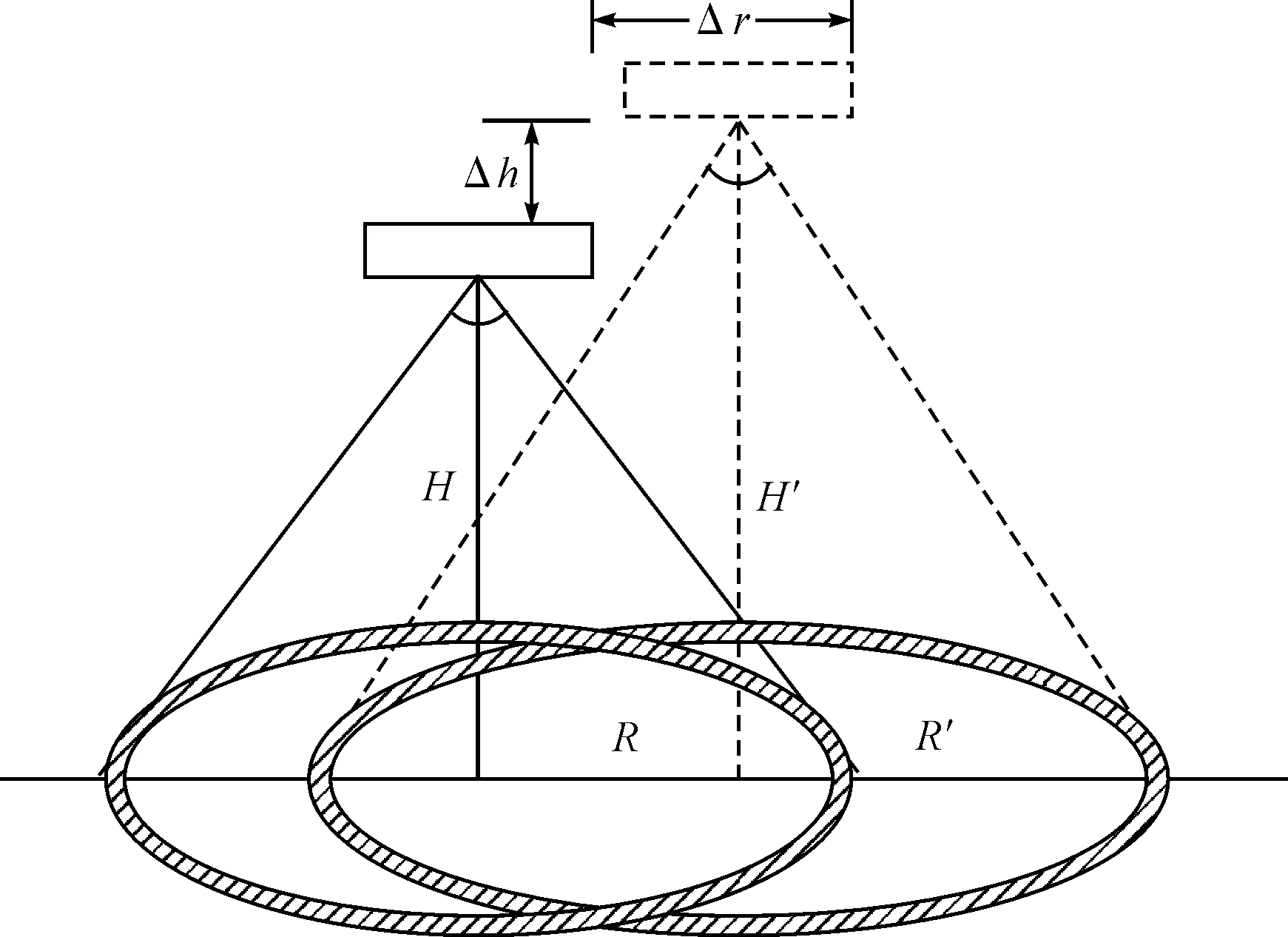
图5 测速雷达斜向抖动示意图
式(10)变为

s(t0)= ∫R±Δrr=0∫2πφ=0F(φ)L'(φ,r,t0)Arexp
(16)
4仿真结果分析
4.1实验参数设置
仿真参数设置如下:雷达载频fc=2.4GHz,列车行驶速度vr=42km/h,多普勒采样频率fs=5800Hz,采样周期Ts=2s;采用双天线测速,天线方向图均呈简单的高斯分布,天线1的方位角φ1=0°,俯仰角θ1=30°,天线2的方位角φ2=0°,俯仰角θ2=45°,主瓣波束宽度φB=20°;假设地面为均匀散射环境,相对采样时间地面散射系数呈慢起伏分布。
4.2仿真结果分析
图6和图7分别是仿真的雷达天线1方向图和进入雷达接收机的地面回波信号幅度谱。从图7的仿真结果可以看到,由于天线方向性和地面散射特性的影响,地面回波信号多普勒频率不是单一的谱线,而是会有一定的多普勒带宽,加上地面散射特性的影响,回波信号幅度谱不会呈现光滑分布的特性,而是随着散射系数的变化而变化。
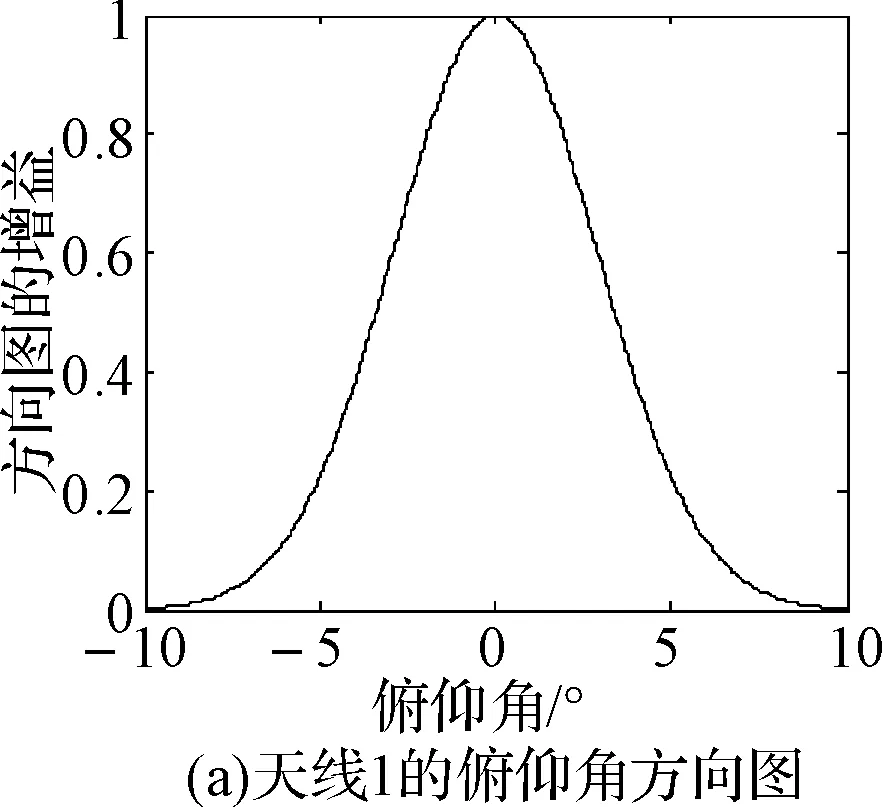

图6 雷达天线1方向图

图7 雷达接收机地面回波信号幅度谱
5结语
本文的创新点在于着重研究分析了在考虑地面散射环境和列车抖动实际情况下的测速雷达多普勒信号模型,将信号模型与实际应用情况更紧密地结合,使数学模型更科学合理,为更精确实时地测量列车行驶速度提供了理论基础。
参 考 文 献
[1] 高岚.机载脉冲多普勒雷达对运动目标可检测性模型分析[J].火力与指挥控制,2011,36(6):60-63.
[2] Merrill LSkolnik, Radar Handbook(Third Edition)[M].南京电子技术研究所,译.雷达手册(第三版).北京:电子工业出版社,2010.
[3] 王秀华.雷达测速公式:从近似到精确[J].光谱实验室,2013,30(3):1415-1417.
[4] 王鑫.X波段多普勒测速接收机关键技术研究[D].南京:南京理工大学,2007.
[5] 陈全斌.基于脉冲多普勒理论的高精度雷达测速技术[D].南京:南京理工大学,2006.
[6] 贾文超,白显,任利哗,等.基于DSP处理器的多普勒雷达系统设计[J].长春工业大学学报(自然科学版),2007, 28(1): 70-73.
[7] 孟欣喜,陈文会,刘小民,等.LFMCW 雷达测距系统及其信号处理算法的设计[J]. 科学技术与工程,2011,11(33):8191-8194.
[8] Richard Klemm. Principles of Space-Time Adaptive Processing[C]//IET, 2006.
[9] 郭立新,吴振森.二维分数布朗运动(FBM)随机粗糙面电磁散射的基尔霍夫近似[J].物理学报,2001,50(1):42-47.
[10] 王彩云,王勇,唐家奎,等.复杂目标地背景高频宽带建模仿真[J].电波科学学报,2014,29(2):282-287.
Error Analysis of Train Doppler Speed Detection Signal Model
LI XiaoboCHEN ShiwaMAO Yunxiang
(Heifei Electronic Engineering Institution,Hefei230037)
AbstractA Doppler radar signal mathematic model considering train vibrating is proposed in this paper. First, the principle of radar Doppler speed detection is analyzed and the formula of radar ground echo is derived. Then, Doppler signal vector model of single scattering module at different time is put forward. Finally, according to independence feature of single scattering module, Doppler signal vector model of all scattering modules is proposed.
Key WordsDoppler, vibrating error, homogeneous scattering
* 收稿日期:2015年11月15日,修回日期:2015年12月27日
基金项目:安徽省科技攻关项目(1310115188)资助。
作者简介:李小波,男,博士,副教授,研究方向:雷达信号处理,阵列信号处理。
中图分类号TN247
DOI:10.3969/j.issn.1672-9730.2016.05.037
