永磁同步电机无测速传感器控制系统设计
2016-06-20姚明林
李 兵,张 欣,姚明林
(1.唐山学院,河北 唐山 063000;2.华北理工大学 电气工程学院,河北 唐山 063009)
永磁同步电机无测速传感器控制系统设计
李兵1,张欣2,姚明林1
(1.唐山学院,河北 唐山 063000;2.华北理工大学 电气工程学院,河北 唐山 063009)
摘要:针对工业生产中永磁同步电机控制系统需降低生产成本、节约能源的实际需求,设计了永磁同步电机无测速传感器控制系统。选用矢量控制,保证电流与转矩成正比关系变化。利用Sigmoid函数代替切换函数,减小抖振。通过对不同负载情况下的仿真,验证了电机转速能较好地跟踪转速的给定值,滑模观测器估算精度较高,系统具有鲁棒性。
关键词:永磁同步电机;无测速传感器;滑模观测器;仿真
0引言
永磁同步电机控制系统通常采用光电码盘等传感器检测电机转速,这样使生产成本大大增加的同时,系统易于受环境干扰,运行的可靠性降低。因此,去除测量电机转子位置及其速度的机械式传感器、提供一种有效的低成本的无传感器控制技术具有极其重要的实际意义。文中无测速传感器控制利用电机可测量的电信号,选用滑模电流观测器估算转子的速度和位置,并将其作为系统的反馈量,实现对系统的闭环控制。
1矢量控制系统
永磁同步电机的控制方法多种多样,最普遍采用的是矢量控制策略。由于电机三相定子电流中包含了具有耦合关系的转矩分量与励磁分量,要实现矢量控制,就需要对定子电流里的转矩分量和励磁分量进行解耦,使电机具有直流电机的调速控制性能。
矢量控制系统中的三相绕组产生的电压或电流等电信号,可以用两两相互垂直的绕组所产生的相应电信号来代替。根据恒定功率转换理论,可以得到αβ两相静止坐标系与ABC三相静止坐标系的变换关系,如式(1)所示,该变换关系称为克拉克(Clark)变换,又称为3/2变换。

(1)
矢量控制系统中,αβ两相静止坐标系到dq两相旋转坐标系的变换关系如式(2),称为帕克(Park)变换,又称为2s/2r变换。

(2)
在矢量控制系统中,电流内环中定子电流的交轴分量与转矩成正比关系变化,即定子电流随负载的变化而变化,速度外环的位置速度检测采用滑模观测器估算转子速度[1],如图1所示。

图1 永磁同步电动机矢量控制系统结构图
2永磁同步电机
永磁同步电机主要由定子和转子两部分组成,它的定子与绕线同步电机相似,采用分布及短距的三相对称定子绕组,以得到接近正弦的相电动势,转子则用铁氧体或稀土永磁材料代替绕线同步电机的励磁系统,因而不再需要安装励磁绕组、集电环和电刷。当三相正弦电流作用于定子时,在定子和转子空隙中会产生一个相同形状的磁动势,定子磁通和转子磁通的交互作用使永磁同步电机产生电磁转矩。
定子绕组的电压方程:

(3)
电动势方程:

(4)
转矩方程:
T=PnΨfiq。
(5)
其中:uα,uβ为定子电压;eα,eβ为定子感应电动势;iα,iβ为定子电流;Rs为定子相电阻;L为定子相电感;ω为转子角速度;θr为转子转角;Ψf为转子磁链;Pn为电机极对数;T为电磁转矩。
在矢量控制作用下,实现电流的解耦,从转矩方程可以看出,电机的输出转矩与电流成线性关系,永磁同步电机近似成直流电机[2]。
3滑模电流观测器
通过在两相静止坐标轴系上永磁同步电机的数学模型,构建基于永磁同步电机定子电流模型的滑模观测器。利用霍尔电流互感器测量定子电流信号,这样通过不断地修正定子电流的估算值和实际之间的偏差,使之趋于零,实现估计电流对实际电流的跟随,进而根据定子电压电流信号中所包含的转子转角位置信息,通过数学方法计算电机转子转角位置信息,估算永磁同步电机的转速,取代机械式转速检测装置,实现无传感器控制。
滑模电流观测器数学模型:

(6)


(7)
常规非连续控制的切换函数sign只能取1和-1两个值,而在sigmoid函数中,正的常数a用来调整sigmoid函数的斜率,电流误差使sigmoid函数的输出值在1和-1之间连续变化,因此sigmoid函数为光滑连续曲线,减小了滑模观测器的抖振[3]。
由于含有较高的离散的电流误差信号,反电动势的值必须经过滤波处理,需要设计一个低通滤波器,选择合适的截止频率,就可以滤掉高频干扰信号,得到光滑连续的反电动势估计值。式(8)为设计的一阶低通滤波器。
反电动势的估算:

(8)
转子位置及电角度:

(9)
(10)

4仿真分析

(1)选取脉冲信号作为时变负载,其特点为上升阶段和下降阶段均为阶跃变化。该信号ΔTL的幅值为2N·m,周期为0.05s。
脉冲信号作为时变负载的转速图如图2所示。从仿真图2可以看出,估计转速在0.35s后转速为1 000rad/s处趋于稳定,且与测量值基本保持一致,滑模观测器的观测值较准确。

图2 脉冲信号作为时变负载的转速图
脉冲信号作为时变负载的电磁转矩观测图如图3所示。脉冲时变负载转矩的上升阶段和下降阶段均为阶跃变化,分别对应了负载转矩的突然增大和突然减小。系统根据负载变化及时做出调整,使电机的转速在1 000 rad/s下平稳运行,可以看出电机调速系统的稳定性。
脉冲信号作为时变负载的三相电流图如图4所示。从仿真图4中可以看出,在脉冲上升时,定子三相电流逐渐增大,达到稳态并保持恒定,在脉冲下降时,定子三相电流逐渐减小,最终达到稳态且保持恒定。因此定子三相电流随负载转矩的变化而变化,幅值恒定且具有周期性[5]。
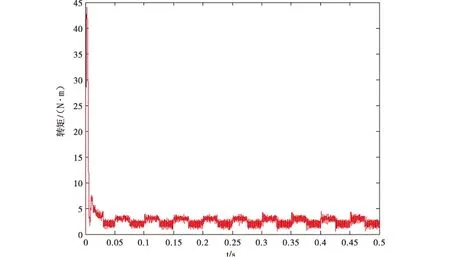
图3 脉冲信号作为时变负载的电磁转矩观测图

图4 脉冲信号作为时变负载的三相电流图
(2)选取三角波信号作为时变负载,其特点为:上升阶段按线性规律变化,斜率为常数,下降阶段为阶跃变化。该信号ΔTL的幅值为1 N·m,周期为0.05 s。
三角波信号作为时变负载的转速图如图5所示。从仿真图5可以看出,估计转速在0.3 s后转速1 000 rad/s处趋于稳定,且与测量转速基本保持一致,滑模观测器能实现快速准确观测的目的。

图5 三角波信号作为时变负载的转速图
三角波信号作为时变负载的电磁转矩观测图如图6所示。三角波时变负载转矩的上升阶段按线性规律变化,斜率为常数,下降阶段为阶跃变化,分别对应了负载转矩的缓慢增大和突然减小。

图6 三角波信号作为时变负载的电磁转矩观测图
三角波信号作为时变负载的三相电流图如图7所示。定子电流随负载转矩的变化而变化,在负载逐渐上升阶段,定子电流逐渐增大,当负载突然减小时,定子电流随之突然减小。
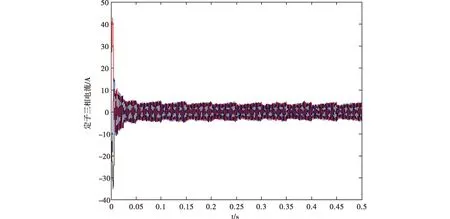
图7 三角波信号作为时变负载的三相电流图
(3)选取正弦信号作为时变负载,其特点为:幅值恒定且具有连续性,周期性。该信号ΔTL=sin(40πt)N·m,频率为40π rad/s。则负载转矩TL=[3+sin(40πt)]N·m。
正弦信号作为时变负载的转速图如图8所示。从仿真图8可以看出,估计转速在0.32 s后转速1 000 rad/s处趋于稳定,且与测量转速基本保持一致,滑模观测器的观测值较为准确。
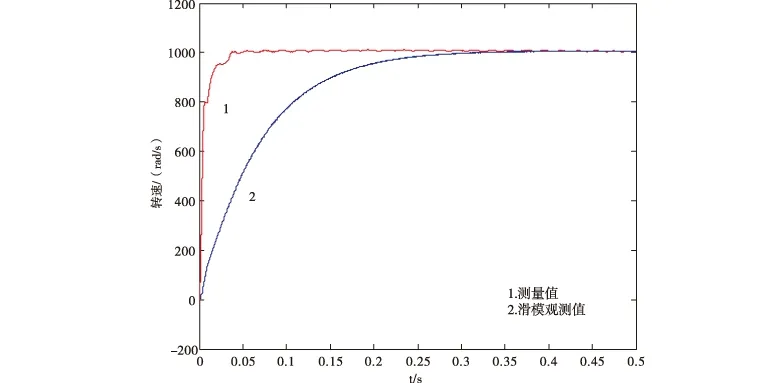
图8 正弦信号作为时变负载的转速图
正弦信号作为时变负载的电磁转矩观测图如图9所示。从中可以看出,负载转矩按正弦规律变化,幅值恒定,连续且具有周期性。

图9 正弦信号作为时变负载的电磁转矩观测图
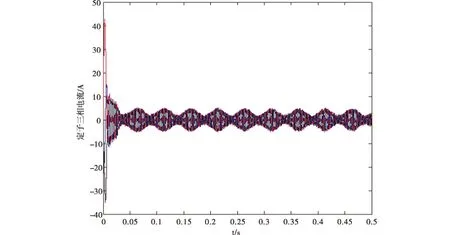
图10 正弦信号作为时变负载的三相电流图
正弦信号作为时变负载的三相电流图如图10所示。定子电流随负载转矩的变化而变化,在负载逐渐上升阶段,定子电流逐渐增大;当负载减小时,定子电流随之减小。
5结论
无测速传感器控制方式通过选用Sigmoid函数抖振减小,滑模观测器的观测值较精确,降低了系统的成本。当负载转矩发生变化时,如线性规律变化、阶跃变化、幅值恒定、周期性变化等,矢量控制可以保证系统正常工作,电机的速度能较好地跟踪速度的给定值,稳态误差较小,系统具有鲁棒性。
参考文献:
[1]李冉.永磁同步电机无位置传感器运行控制技术研究[D].杭州:浙江大学,2013.
[2]徐艳平,刘煜,钟彦儒.永磁同步电机的无速度传感器直接转矩控制[J].电气传动,2010,40(4):24-27.
[3]牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.
[4]韩会山,陈龙,程德芳.异步电机矢量控制系统的设计及仿真研究[J].计算机仿真,2012,29(2):400-403.
[5]张国瑞.伺服电机速度估计与控制[D].西安:西安电子科技大学,2011.
(责任编校:李秀荣)
The Design of PMSM Sensorless Speed Control System
LI Bing1,ZHANG Xin2,YAO Ming-lin1
(1.Tangshan University, Tangshan 063000,China;2.College of Electrical Engineering, North China University of Science and Technology, Tangshan 063009, China)
Abstract:To satisfy the actual demands of low cost and energy consumption in the industrial production of PMSM control devices, the authors of this paper have designed a PMSM sensorless control system, in which vector control is applied to ensure that the current and torque is proportional and Sigmoid function is used to replace the switching function to reduce chattering. The simulation of different loads showed that the motor speed could track the given value of the speed, and the estimation precision of the sliding mode observer was high, and the system was robust.Key Words: PMSM;no speed sensor; SMO;simulation
基金项目:河北省科技支撑计划项目(13276201D)
作者简介:李兵(1962-),女,河北抚宁人,教授,博士,主要从事自动控制研究。
中图分类号:TM341
文献标志码:A
文章编号:1672-349X(2016)03-0001-04
DOI:10.16160/j.cnki.tsxyxb.2016.03.001
